3D工件识别(定位)
本教程将介绍工件定位装配场景中如何准确定位圆孔,并以“3D工件识别(定位)”教学示例工程为例,介绍3D工件识别步骤的参数调节方法,最后介绍实际应用时的注意事项。
| 应用场景 | 识别效果 |
|---|---|
|
|

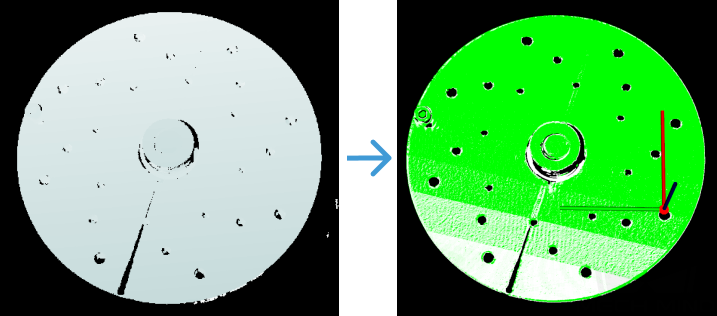
下文将基于该示例工程介绍实际应用指导和应用注意事项。
应用指导
“3D工件识别(定位)”工程位于Mech-Vision案例库中,你可在教学示例-3D定位分组下获取并创建该工程。创建工程后,单击选中3D工件识别步骤,然后单击配置向导按钮,打开3D工件识别工具并了解如何调节参数。该过程包括点云预处理、工件选择与识别和通用设置三个流程。

-
点云预处理:将采集到的图像数据转换为点云,进而设置有效的点云识别区,检测边缘点云,并过滤掉不符合规则的点云,提升后续的识别效率。
-
工件选择与识别:完成工件模板和抓取点的制作后,需根据使用的视觉识别策略,选择是否配置深度学习模型包,调整工件识别相关参数。确保参数配置满足业务精度要求,使工件识别方案能稳定、精确地识别目标工件。
-
通用设置:用于配置输出端口,可根据后续的抓取任务需要,选择输出抓取点或物体中心点相关信息。
下文将对各流程中需调节的重点参数进行介绍。
工件选择与识别
点云预处理完成后,需在工件库中制作工件的点云模板,然后设置匹配相关的参数,用于匹配点云模板。
-
制作工件模板。
单击打开工件库按钮打开工件库。本场景对精度要求较高,需通过示教法设置抓取点,然后利用相机采集点云生成点云模板。完成后,单击保存按钮,回到“3D工件识别”工具页面,再单击更新工件按钮,选择制作好的工件模板并将其用于识别工件位姿。
-
以下参数调节指导仅供参考,请根据现场实际情况调节各项参数。 -
调节粗匹配设置和精匹配设置:为提高识别精度,粗匹配设置和精匹配设置的运行方式均设置为高精度。
-
输出-最大结果输出个数:通常情况下场景中只有一个工件,需将该参数的值设置为1。请根据现场实际需求调整该参数的值。
-
完成后,单击下一步按钮,进入通用设置页面,进行输出端口配置。