温漂补偿方案
本部分介绍在线测量场景中的温漂现象以及在线测量系统温漂补偿方案的组成、工作原理和部署方法。
什么是温漂?
在在线测量场景中,温漂是指设备温度变化引发的测量结果缓慢偏移现象。温漂通常具有“幅度小、持续累积、随环境和设备状态变化”的特点,单次测量不一定明显,但在长时间运行后会表现为结果趋势性漂移。
对在线测量系统而言,温漂主要体现在以下方面:
-
机器人、相机、工装和现场环境温度变化导致点云与特征拟合结果偏移。
-
同一特征在不同时间段的结果分布中心发生偏移,重复性指标恶化。
-
现场出现“初期正常、后期逐步偏离”的质量波动。
在线测量系统温漂补偿方案简介
当产线进入批量运行阶段,温漂会直接影响量产决策质量。温漂补偿方案的目标不是替代工艺能力,而是在既有测量链路中补偿温度相关偏移,维持结果长期稳定性。
该方案重点解决以下问题:
-
长周期运行后测量均值缓慢偏移,导致误判风险上升。
-
白班/夜班、季节切换或车间温控波动时,结果一致性下降。
-
生产节拍稳定但测量结果漂移,排查成本高、定位困难。
温漂补偿方案组成和工作原理
部署温漂补偿方案
建议按照以下流程实施,确保温漂补偿链路完整打通:
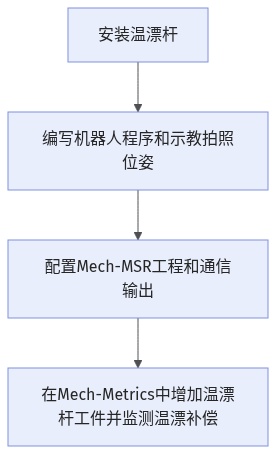
-
安装温漂杆。
-
编写机器人程序和示教拍照位姿。
-
配置Mech-MSR工程和通信输出。
-
为Mech-Metrics增加温漂杆工件并监测温漂补偿。
安装温漂杆
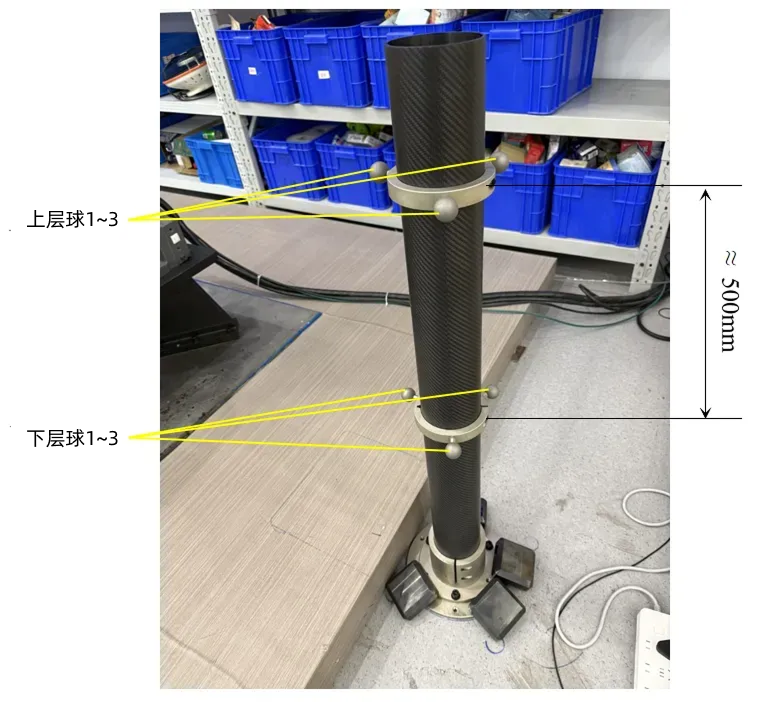
部署温漂补偿方案需要使用梅卡曼德提供的“标定杆”标准产品(以下简称“温漂杆”),该产品包含一个带有6个标定球的杆件组件,以及相关配件和安装工具。
安装温漂杆时请先满足以下刚性要求:
-
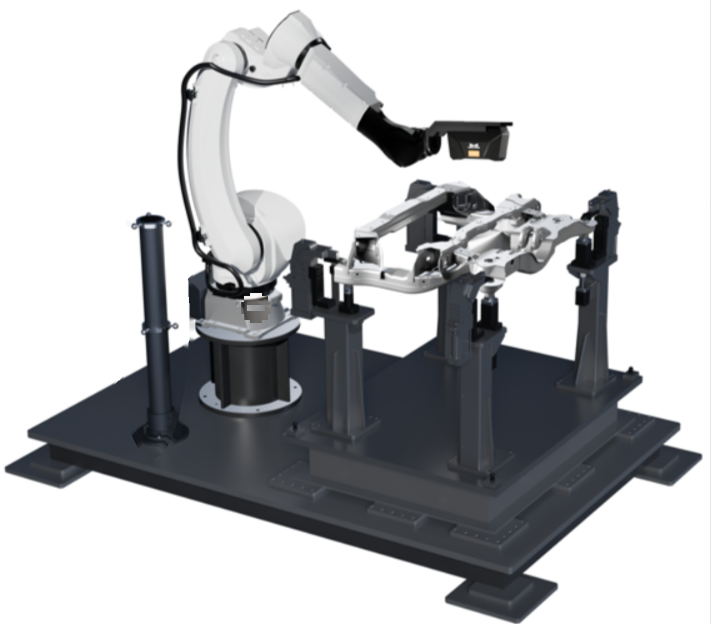
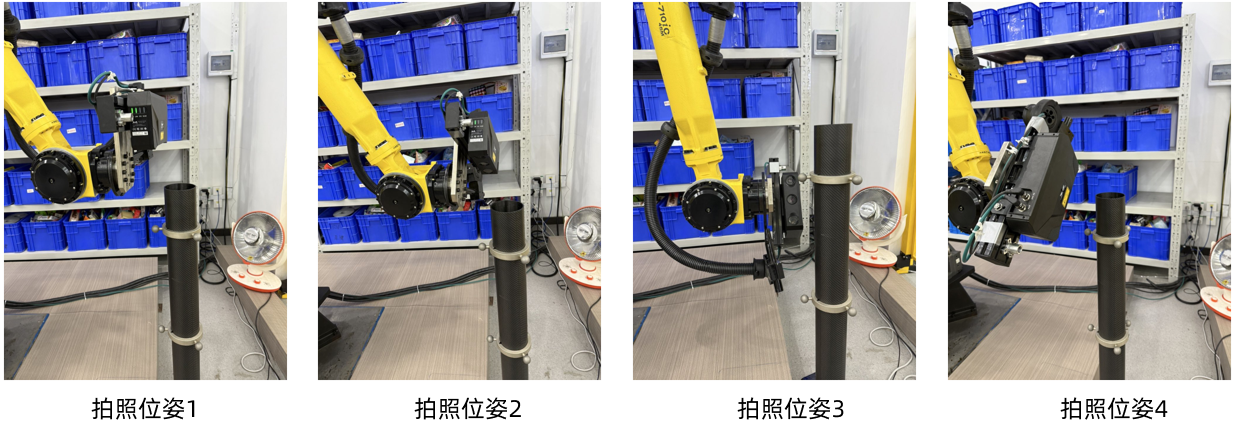
温漂杆安装在机器人一侧,并确保6个标定球的拍照位姿机器人均可达。
-
调节上下球环位置时,上球环高于工件、下球环低于工件,两个球环高度差保持在450~550mm。
满足上述条件后,按以下步骤完成安装:
-
在工位安装温漂杆并完成机械固定,确保无松动、无位移风险。
-
复核6个标定球对应拍照位姿均可达,必要时微调温漂杆位置。
-
调整上下球环高度并复测高差,确认稳定落在450~550mm范围。
-
完成多次空跑验证,确认机器人、相机与温漂杆无碰撞风险。
编写机器人程序和示教拍照位姿
编写机器人程序
下文是FANUC机器人样例程序,其他品牌机器人请参考样例程序逻辑编写。
1: !-------------------------------- ;
2: !FUNCTION: MSR_Metrics_Sample1 ;
3: !Mech-Mind, 2025-12-24 ;
4: !-------------------------------- ;
5:
6: !set current uframe NO. to 0 ;
7: UFRAME_NUM=0 ;
8: !set current tool NO. to 1 ;
9: UTOOL_NUM=1 ;
10: ;
11: LBL[1] ;
12: !Init Socket!Modify IP Address ;
13: CALL MSR_INIT_SKT('8','192.168.1.20',50000,5) ;
14: !Set Custom Values ;
15: CALL MSR_MEAS_PARM(0,0,0,0,0,0,0,0) ;
16: !SR:String Register; R:Register ;
17: !Set Robot_Id,SR No.1,SR No.2,Qc_Mode,R NO.1,R NO.2;
18: !SR No.1:Piece_Name ;
19: !SR No.2:Piece_Sn ;
20: !R No.1:Continuous Mode, R No.2:MM Status ;
21: CALL MSR_ST_MEAS(1,11,12,0,10,95) ;
22: ;
23: !move to robot home position ;
24:J P[0] 100% FINE ;
25: ;
26: !UP-BALL1 ;
27:J P[1] 100% FINE ;
28: WAIT 1.00(sec) ;
29: CALL MSR_MEAS_FEAT(1,101,95) ;
30:J P[2] 100% FINE ;
31: WAIT 1.00(sec) ;
32: CALL MSR_MEAS_FEAT(1,102,95) ;
33:J P[3] 100% FINE ;
34: WAIT 1.00(sec) ;
35: CALL MSR_MEAS_FEAT(1,103,95) ;
36:J P[4] 100% FINE ;
37: WAIT 1.00(sec) ;
38: CALL MSR_MEAS_FEAT(1,104,95) ;
39: ;
40: !UP-BALL2 ;
…
130: ;
131: WAIT .50(sec) ;
132: CALL MSR_END_MEAS(1,10,91,92,93,95) ;
133: ;
134: !Init Socket!Modify IP Address ;
135: CALL MSR_INIT_SKT('8','192.168.1.20',50000,5) ;
136: !Set Custom Values ;
137: CALL MSR_MEAS_PARM(0,0,0,0,0,0,0,0) ;
138: !SR:String Register; R:Register ;
139: !Set Robot_Id,SR No.1,SR No.2,Qc_Mode,R NO.1,R NO.2;
140: !SR No.1:Piece_Name ;
141: !SR No.2:Piece_Sn ;
142: !R No.:Continuous Mode, R No.2:MM Status ;
143: CALL MSR_ST_MEAS(1,5,6,0,10,95) ;
144: ;
145: !Feature1 ;
146:J P[41] 100% FINE ;
147: WAIT 1.00(sec) ;
148: CALL MSR_MEAS_FEAT(1,101,95) ;
149: !Feature2 ;
…
234: ;
235: WAIT .50(sec) ;
236: CALL MSR_END_MEAS(1,10,91,92,93,95) ;
237: ;
238: WAIT .50(sec) ;
239:J P[71] 100% FINE ;
240: JMP LBL[1] ;
241: PAUSE ;下表为上述程序的逻辑解读。
| 行号范围 | 逻辑说明 |
|---|---|
1~10 |
基础设置。 |
11 |
跳转标志(用于循环执行代码)。 |
12~22 |
机器人通信设置和开始测量任务(对应Mech-Metrics中的温漂杆工件)。
|
23~25 |
移动至机器人Home位。 |
26~39 |
拍照采集标定球1的数据。
|
40~130 |
拍照采集标定球2~标定球6的数据。 |
131~133 |
结束测量任务。 |
134~144 |
机器人通信设置和开始测量任务(对应Mech-Metrics中的生产工件)。 |
145~234 |
拍照采集生产工件的待测特征。 |
235~237 |
结束测量任务。 |
238~239 |
移动机器人至过渡点。 |
240 |
跳转标志。与第11行配合使用,实现机器人程序的循环执行。 |
配置Mech-MSR工程和通信输出
在Mech-MSR侧,需要完成如下任务:
-
配置温漂杆标定球工程:确保关键特征识别稳定、并在输出管理中核对通信输出的测量项与通信键,确保与Mech-Metrics侧一一对应。
-
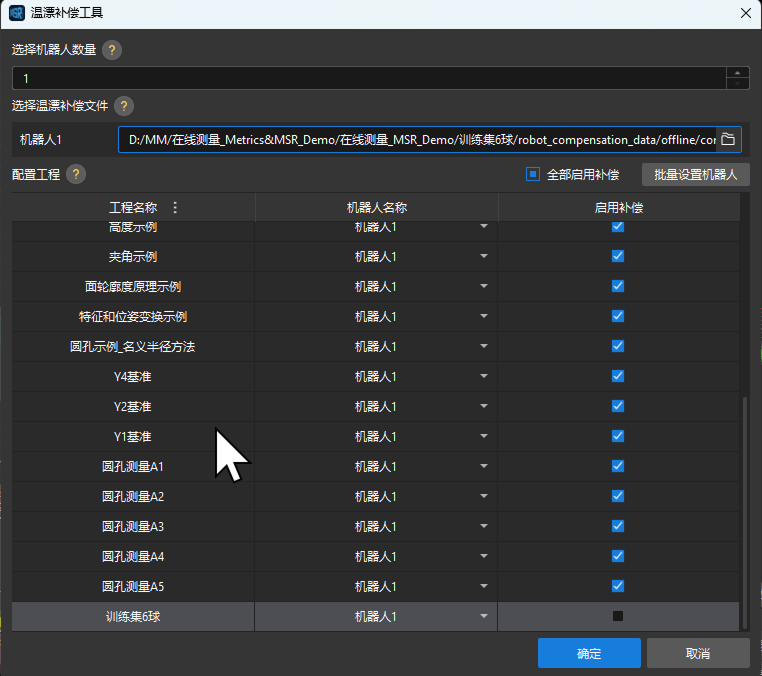
为测量工程启用温漂补偿:使用温漂补偿工具将机器人与工程建立关联,并按工程启用补偿。
-
配置通信输出:确保补偿后的测量结果通过通信输出正确传递给Mech-Metrics,并且通信键与Mech-Metrics侧设置一致。
配置温漂杆标定球工程
入门教程中的“副车架示例工程”中包含了“训练集6球”工程,用于采集温漂杆标定球数据以及更新温漂补偿模型。
“训练集6球”工程的结构如下:
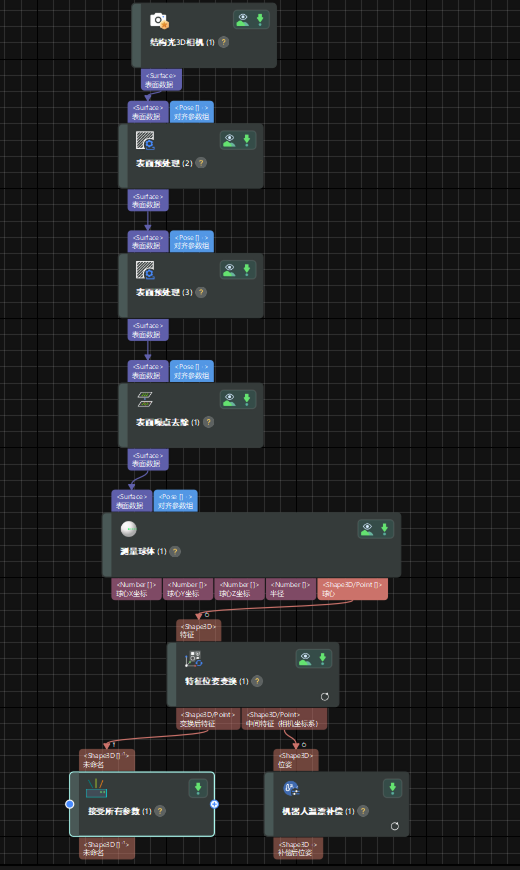
该工程的关键步骤说明如下:
-
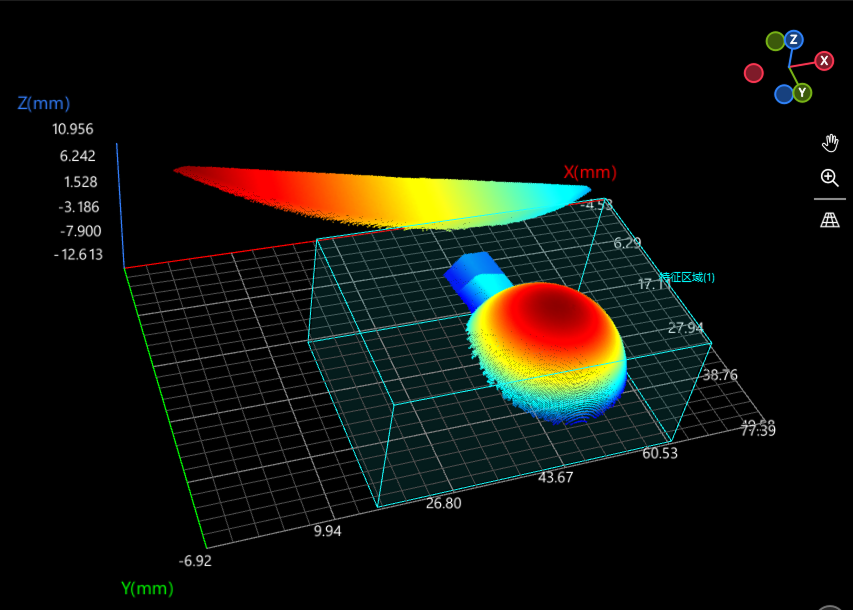
表面预处理:
需要设置3D ROI,确认滤波器类型为“裁剪”,且勾选使用特征区域。
温漂杆上下共6个标定球,每个球从4个角度拍照。可以使用1个稍大的ROI覆盖总共6×4=24个点位共用的区域。
-
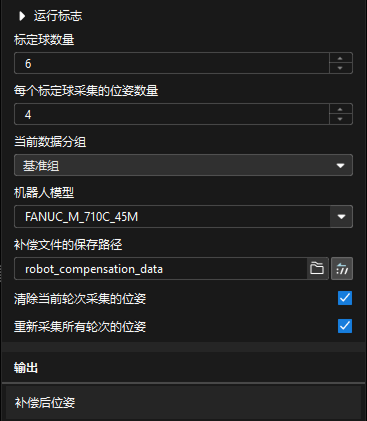
机器人温漂补偿
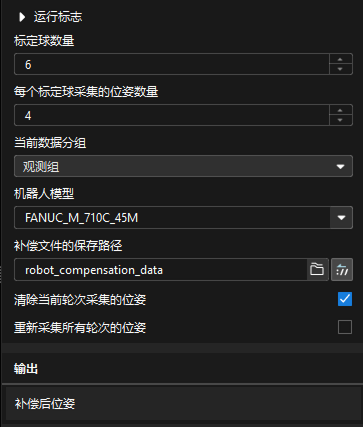
在部署时,参照下文设置温漂补偿参数:
-
当前数据分组:分为“基准组”、“观测组”,首次运行时应设为“基准组”,运行完首轮后,软件将自动切换至“观测组”。
-
机器人模型:选择对应的机器人型号。
-
补偿文件的保存路径:默认设为“robot_compensation_data”文件夹,位于工程文件目录下。
-
清除当前轮次采集的位姿:默认为勾选状态,开始运行后,软件将自动切换为不勾选。
-
重新采集所有轮次的位姿:默认为勾选状态,开始运行后,软件将自动切换为不勾选。
在后续运行时,如果一轮标定球(24个点位)没采集完出现了意外中断,应参照下图设置对应参数,并重新运行机器人程序。
-
配置通信输出
Mech-MSR的测量数据通过中的“通信键”发给Mech-Metrics。
-
如果测量工程只输出一个特征,可以将通信键设置为“feature”。
-
如果测量工程输出了一个特征和一个GD&T,可以将特征的通信键设置为“feature”,GD&T的通信键设置为“gdt”。
-
如果测量工程输出了多个特征和多个GD&T,则每个特征的通信键需设置为Mech-Metrics中对应的特征名称,每个GD&T的通信键需设置为Mech-Metrics中对应的GD&T名称。也就是说,通信键必须与Mech-Metrics中的名称配置保持一致。这样Mech-Metrics才能正确区分不同特征和GD&T的数据。
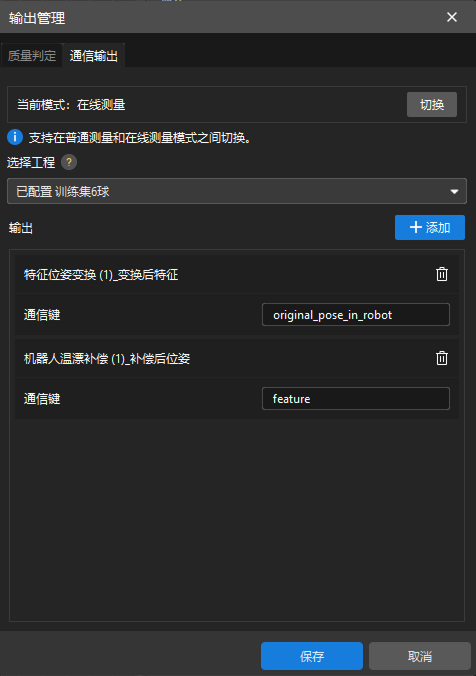
对于标定球工程,通信输出的通信键固定按如下配置:
| 测量项 | 通信键 |
|---|---|
特征位姿变换步骤输出的变换后特征 |
original_pose_in_robot |
机器人温漂补偿步骤输出的补偿后位姿 |
feature |