TCP标准接口指令
本部分介绍在线测量系统支持的TCP标准接口指令。TCP标准接口指令用于实现机器人与在线测量系统的TCP协议通信。
指令概览
| 指令名 | 调用顺序 | 是否必须调用 | 描述 |
|---|---|---|---|
- |
否 |
用于在Mech-Metrics中切换工程。 |
|
① |
是 |
使用机器人或外部设备告知Mech-Metrics开始测量新工件,并将工件名称,工件SN,以及其他工件信息发送给Mech-Metrics。 |
|
② |
是 |
触发对应测量特征的Mech-MSR工程运行。如需进行多次测量,可调用本指令多次。 |
|
④ |
是 |
使用机器人或外部设备告知Mech-Metrics结束测量,询问工件测量结果。 |
|
③ |
否 |
部分场景中工件SN码无法在测量开始时获得,例如需要在测量过程中扫码获得。本指令用于在工件测量过程中传入工件SN。 |
|
⑥ |
否 |
通过传入工件SN,将Mech-Metrics软件主界面切换为对应工件的数据视图。 |
|
- |
是 |
用于机器人标定流程控制与状态查询。调用指令时传入标定状态参数,用于重新开始标定或追加标定点;返回当前标定状态、下一标定点的法兰位姿以及关节角信息。 |
|
在线测量系统支持的指令发送方式如下图所示: 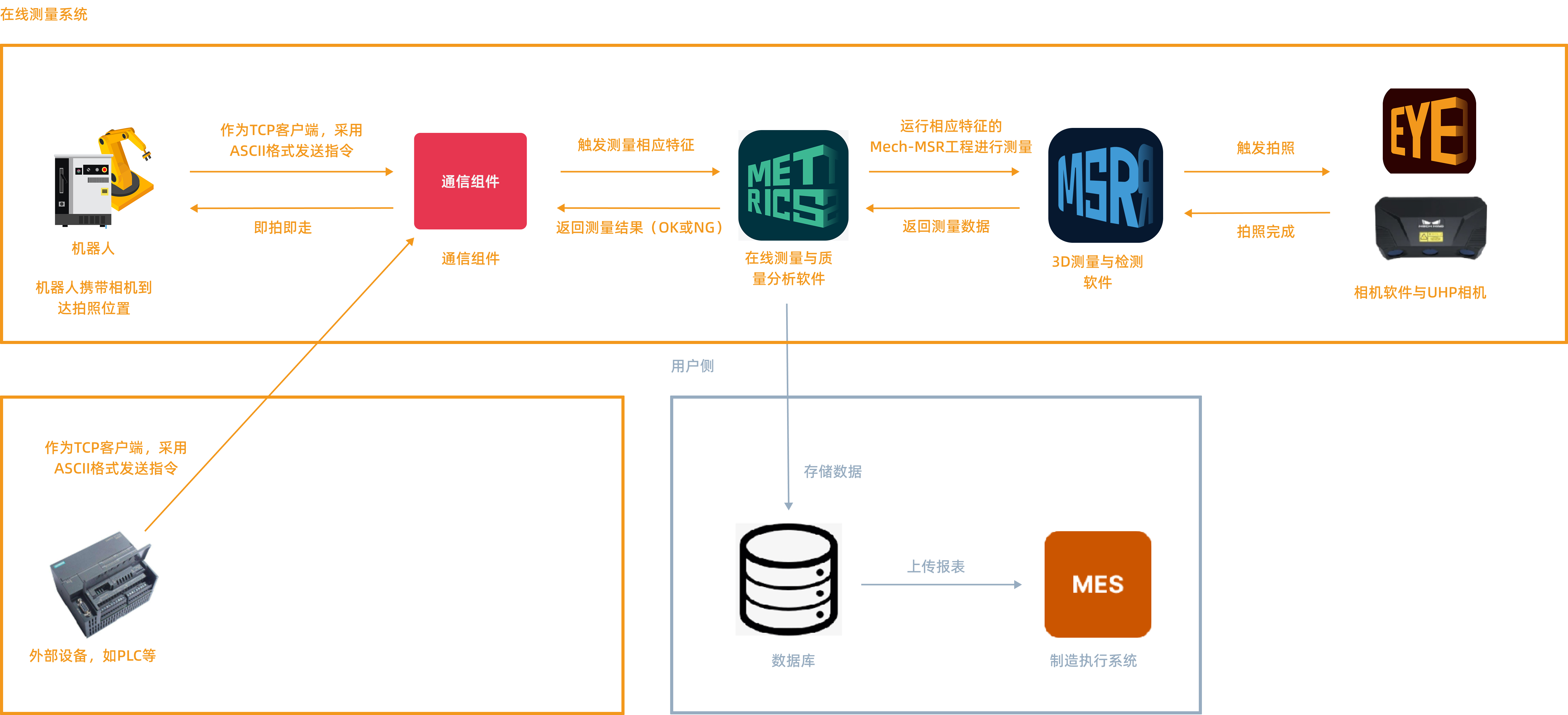
说明如下:
|
通信指令
800 指令——切换工程
发送指令
发送方
机器人或者外部设备(如PLC等)
接收方
Mech-Metrics
发送时机
开始切换工程前。
指令功能
机器人或外部设备告知Mech-Metrics开始切换工程。
指令格式
800,工件编号,工程编号指令示例
800,1,1指令参数解释
| 参数 | 是否必选 | 描述 |
|---|---|---|
工件编号 |
是 |
该参数指定工件类型的唯一标识。工件编号为1到99之间的整数。指定的工件编号必须已经在配置工件编号界面配置。 在上述示例中,第一个1为工件编号。 |
工程编号 |
是 |
该参数指定待切换的工程的编号。指定的工程编号必须已经通过工程切换规则配置。 在上述示例中,第二个1为工程编号。 |
返回指令
发送方
Mech-Metrics
接收方
机器人或者外部设备(如PLC等)
发送时机
收到发送的指令。
指令功能
Mech-Metrics告知机器人收到了切换新工程的指令,开始切换新工程,并告知机器人此次切换是否成功。
指令格式
800,状态码指令示例
800,8105指令参数解释
| 参数 | 描述 |
|---|---|
状态码 |
该参数代表指令执行结果的状态码。
在上述示例中,Mech-Metrics返回的状态码是 8105,表示指令执行成功。 |
801 指令——开始测量任务
发送指令
发送方
机器人或者外部设备(如PLC等)
接收方
Mech-Metrics
发送时机
新工件测量开始时。
指令功能
机器人或外部设备告知Mech-Metrics开始测量新工件。
指令格式
801,工件编号,工件名称,工件SN,质量检测模式,自定义1,自定义2,自定义3,自定义4,自定义5,自定义6,自定义7,自定义8指令示例
801,1,part01,sn001,2,1,2,3,4,5,6指令参数解释
| 参数 | 是否必选 | 描述 |
|---|---|---|
工件编号 |
是 |
该参数指定工件类型的唯一标识。工件编号为1到99之间的整数。指定的工件编号必须已经在配置工件编号界面配置。 在上述示例中,第一个 1 为工件编号。 |
工件名称 |
是 |
该参数指定需测量的工件的名称。工件名可包括字母和数字,长度不超过20字符。 在上述示例中,part01 为工件名。 |
工件SN |
是 |
该参数指定工件SN。工件SN又称工件序列号,是该工件的唯一标识。工件SN可包括字母和数字,长度不超过30字符。 在上述示例中,sn001 为工件SN。 此参数为必填参数。部分场景中工件SN无法在测量开始时获得,例如需要在测量过程中扫码获得,此时本参数可为空,但本参数位置需要预留。 示例:801,1,part01,,1,2,3,4,5,6。在本示例中,工件SN未填写,但本参数位置已通过逗号(,)预留。 |
质量检测模式 |
是 |
该参数指定工件的质量检测模式。1:全检,即检测工件的全部尺寸;2:半检,即检测工件的关键尺寸。0:使用当前配置。 在上述示例中,第一个 2 代表质量检测模式为半检。 |
自定义1-8 |
否 |
该参数为可选参数,用于提供工件的自定义信息。自定义参数仅在需要为Mech-Metrics提供更多工件信息时使用。本指令最多支持8个自定义参数,每个自定义参数的值为1到8之间的整数。 如需使用自定义参数:
在上述示例中,1,2,3,4,5,6 为自定义参数,且已经在Mech-Metrics软件中为其参数值配置了含义。 |
返回指令
发送方
Mech-Metrics
接收方
机器人或者外部设备(如PLC等)
发送时机
收到发送的指令。
指令功能
Mech-Metrics告知机器人收到了开始测量新工件的指令,开始创建新工件历史数据条目,并告知机器人此次运行是连续运行还是单次运行。
指令格式
801,状态码,连续执行/单次执行指令示例
801,8100,1指令参数解释
| 参数 | 描述 | ||||
|---|---|---|---|---|---|
状态码 |
该参数代表指令执行结果的状态码。
在上述示例中,Mech-Metrics返回的状态码是 8100,表示指令执行成功。 |
||||
连续执行/单次执行 |
该参数代表此次运行是连续运行还是单次运行。
在上述示例中,1 表示连续运行。
|
802 指令——运行特征测量
发送指令
发送方
机器人或者外部设备(如PLC等)
接收方
Mech-Metrics
发送时机
机器人到达测量特征拍照位置。
指令作用
触发对应测量特征的Mech-MSR工程运行。
指令格式
802,工件编号,测量特征编号,机器人关节角,机器人法兰位姿指令示例
802,1,1,10,20,30,40,50,60,100,200,300,0,180,0指令参数解释
| 参数 | 是否必选 | 描述 | ||
|---|---|---|---|---|
工件编号 |
是 |
该参数指定工件类型的唯一标识。工件编号为1到99之间的整数。指定的工件编号必须已经在配置工件编号界面配置。 在上述示例中,第一个 1 为工件编号。 |
||
测量特征编号 |
是 |
该参数指定待测量特征的编号。特征编号为该特征的唯一标识。编号为1到999之间的整数。
在上述示例中,第二个 1 为测量特征编号。 |
||
机器人关节角 |
是 |
该参数指定机器人关节角数据。一般为机器人的六个关节角的数据(J1-J6)。单位为度(deg)。 在上述示例中,10,20,30,40,50,60 为机器人关节角数据。 |
||
机器人法兰位姿 |
是 |
该参数指定机器人法兰位姿。一般有六位数据,包括三个位置数据和三个姿态数据。位置数据的单位是毫米。姿态数据用欧拉角表示,单位是角度。 在上述示例中,100,200,300,0,180,0 为机器人法兰位姿,其中,100,200,300 为位置数据,0,180,0 为姿态数据。 |
返回指令
发送方
Mech-Metrics
接收方
机器人或者外部设备(如PLC等)
发送时机
Mech-Metrics收到相机已经完成拍照的信号。
指令作用
告知机器人相机拍照完成,使其前往下一个测量位置。
指令格式
802,状态码指令示例
802,8101指令参数解释
| 参数 | 描述 |
|---|---|
状态码 |
该参数代表指令执行结果的状态码。
在上述示例中,Mech-Metrics返回的状态码为 8101,表示指令执行成功。 |
803 指令——结束测量任务
发送指令
发送方
机器人或者外部设备(如PLC等)
接收方
Mech-Metrics
发送时机
最后一个测量特征拍照完成,工件测量完成。
指令功能
机器人或外部设备告知Mech-Metrics结束测量,询问工件测量结果。
指令格式
803,工件编号指令示例
803,1指令参数解释
| 参数 | 是否必选 | 描述 |
|---|---|---|
工件编号 |
是 |
该参数指定工件类型的唯一标识。工件编号为1到99之间的整数。指定的工件编号必须已经在配置工件编号界面配置。 在上述示例中,1 为工件编号。 |
返回指令
发送方
Mech-Metrics
接收方
机器人
发送时机
收到发送的指令。
指令功能
返回测量结果。
指令格式
803,状态码,判定结果,工件状态1,工件状态2,工件状态3指令示例
803,8102,0,0,0,0指令参数解释
| 参数 | 描述 |
|---|---|
状态码 |
该参数代表指令执行结果的状态码。
在上述示例中,Mech-Metrics返回的状态码是 8102,表示指令执行成功。 |
工件判定 |
该参数代表工件判定结果。
在上述示例中,第一个 0 代表工件合格。 |
工件状态1-3 |
这些参数代表超出一级公差带、二级公差带、三级公差带的测量项数量。
在上述示例中,最后三个 0 代表未设置任何公差带或者没有任何测量项的测量值超过了对应公差带。 |
804 指令——测量中传入工件SN
发送指令
发送方
机器人或外部设备(PLC等)
|
机器人与外部设备分别在何种情况下发送804指令?
|
接收方
Mech-Metrics
发送时机
当前工件测量过程中任意时机。
指令功能
部分场景中工件编号(又称为工件SN或工件ID)无法在测量开始时获得,例如需要在测量过程中扫码获得。本指令用于在工件测量过程中传入工件SN。
指令格式
804,工件编号,工件SN指令示例
804,1,sn001指令参数解释
| 参数 | 是否必选 | 描述 |
|---|---|---|
工件编号 |
是 |
该参数指定工件类型的唯一标识。工件编号为1到99之间的整数。指定的工件编号必须已经在配置工件编号界面配置。 在上述示例中,1 为工件编号。 |
工件SN |
是 |
该参数指定工件SN。工件SN又称工件序列号,是该工件的唯一标识。工件SN可包括字母和数字,长度不超过30字符。 在上述示例中,sn001 为工件SN。 |
返回指令
发送方
Mech-Metrics
接收方
机器人或外部设备(PLC等)
发送时机
收到发送的指令。
指令功能
告知机器人工件SN传入成功。
指令格式
804,状态码指令示例
804,8103指令参数解释
| 参数 | 描述 |
|---|---|
状态码 |
该参数代表指令执行结果的状态码。
在上述示例中,Mech-Metrics返回的状态码是 8103,表示指令执行成功。 |
805 指令——查询工件历史数据
发送指令
发送方
机器人或外部设备(PLC等)
|
机器人与外部设备分别在何种情况下发送805指令?
|
接收方
Mech-Metrics
发送时机
非测量中任意时刻。
指令功能
通过外部传入 工件SN ,将Mech-Metrics软件主界面切换为传入编号的工件。
指令格式
805,工件编号,工件SN指令示例
805,1,sn001指令参数解释
| 参数 | 是否必选 | 描述 |
|---|---|---|
工件编号 |
是 |
该参数指定工件类型的唯一标识。工件编号为1到99之间的整数。指定的工件编号必须已经在配置工件编号界面配置。 在上述示例中,1 为工件编号。 |
工件SN |
是 |
该参数指定工件SN。工件SN又称工件序列号,是该工件的唯一标识。工件SN可包括字母和数字,长度不超过30字符。 在上述示例中,sn001 为工件SN。 |
返回指令
发送方
Mech-Metrics
接收方
机器人或外部设备(PLC等)
发送时机
收到发送的指令。
指令功能
告知工件SN传入成功。
指令格式
805,状态码指令示例
805,8104指令参数解释
| 参数 | 描述 |
|---|---|
状态码 |
该参数代表指令执行结果的状态码。
在上述示例中,Mech-Metrics返回的状态码是 8104,表示指令执行成功。 |
701 指令——标定
发送指令
发送方
机器人
接收方
Mech-MSR
发送时机
需要进行机器人手眼标定时。
指令功能
机器人告知Mech-MSR开始手眼标定。该指令需要与Mech-MSR相机菜单栏中的3D相机标定工具结合使用。
指令格式
701,标定状态,机器人法兰位姿,机器人关节角指令示例
701,0,100,200,300,0,180,0,10,20,30,40,50,60指令参数解释
| 参数 | 是否必选 | 描述 |
|---|---|---|
标定状态 |
是 |
该参数指定当前标定状态。
|
法兰位姿 |
是 |
机器人当前法兰位姿。一般有六位数据,包括三个位置数据和三个姿态数据。位置数据的单位是毫米。姿态数据用欧拉角表示,单位是角度。 在上述示例中,100,200,300,0,180,0为机器人当前法兰位姿数据,其中,100,200,300为位置数据,0,180,0为姿态数据。 |
关节角 |
是 |
该参数指定机器人关节角数据。一般为机器人的六个关节角的数据(J1-J6)。单位为度(deg)。 在上述示例中,10,20,30,40,50,60为机器人关节角数据。 |
返回指令
发送方
Mech-MSR
接收方
机器人
发送时机
收到发送的指令。
指令功能
Mech-MSR告知机器人收到了重新标定或者追加标定点的指令,开始执行指令,并告知机器人此次执行是否成功。
指令格式
701,状态码,标定状态,下一标定点的法兰位姿,下一标定点的关节角指令示例
701,7100,0,100,200,300,0,180,0,10,20,30,40,50,60指令参数解释
| 参数 | 描述 |
|---|---|
状态码 |
该参数代表指令执行结果的状态码。
|
标定状态 |
该参数代表标定指令的执行状态。
|
下一标定点的法兰位姿 |
机器人将要移动至下一标定点的法兰位姿数据。 在上述示例中,100,200,300,0,180,0为机器人将要移动至下一标定点的法兰位姿数据,其中,100,200,300为位置数据,0,180,0为姿态数据。 |
下一标定点的关节角 |
机器人将要移动至下一标定点的关节角数据。 在上述示例中,10,20,30,40,50,60为机器人将要移动至下一标定点的关节角数据。 |