제공된 정렬 유형에 따라 포즈를 정렬하기
이 부분에서는 제공된 정렬 유형에 따라 포즈를 정렬하는 방법을 설명합니다.
6가지 포즈 정렬 방법이 제공되며 드롭다운 바에서 추가할 수 있습니다.
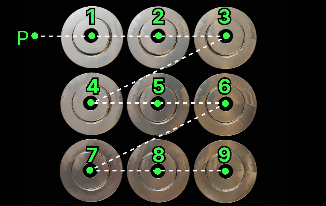
"S"자형으로 포즈 정렬
기능 설명
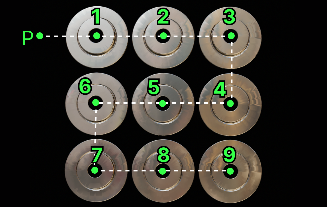
지정된 참조 포즈와 행 및 열의 방향에 따라 행과 열로 포즈를 정렬("행 방향"은 포즈 정렬에서 우선순위로 지정됨)합니다. 이 유형은 일반적으로 가지런히 배열된 공작물 언로딩 또는 디팔레타이징에 사용됩니다.
사용 방법
참조 포즈
참조 포즈를 설정하는 방법에는 매니퓰레이터로 설정 및 외부 스텝에서 입력 두 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
참조 포즈를 설정하는 방식 |
설명 |
방식 |
예시 그림 |
1 |
매니퓰레이터로 설정 |
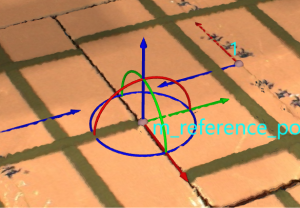
매니퓰레이터의 위치와 자세를 설정하여 참조 포즈를 설정합니다. |
|
|
2 |
외부 스텝에서 입력 |
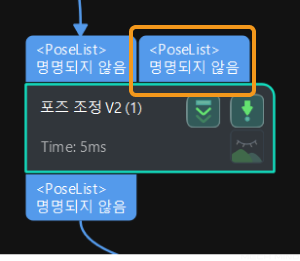
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
"Z"자형으로 포즈 정렬
기능 설명
지정된 참조 포즈와 행 및 열의 방향에 따라 행과 열로 포즈를 정렬("행 방향"은 포즈 정렬에서 우선순위로 지정됨)합니다. 이 유형은 일반적으로 가지런히 배열된 공작물 언로딩 또는 디팔레타이징에 사용됩니다.
사용 방법
참조 포즈
참조 포즈를 설정하는 방법에는 매니퓰레이터로 설정 및 외부 스텝에서 입력 두 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
참조 포즈를 설정하는 방식 |
설명 |
방식 |
예시 그림 |
1 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 참조 포즈를 설정합니다. |
|
|
2 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
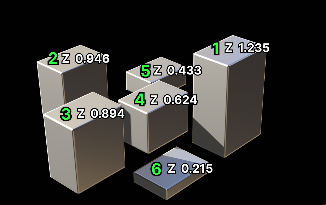
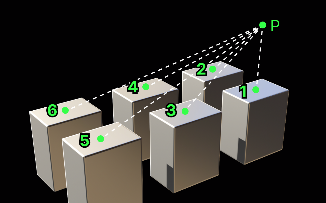
포즈에서 참조 포즈까지의 거리를 기준으로 정렬
사용 방법
참조 포즈
참조 포즈를 설정하는 방법에는 매니퓰레이터로 설정 및 외부 스텝에서 입력 두 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
참조 포즈를 설정하는 방식 |
설명 |
방식 |
예시 그림 |
1 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 참조 포즈를 설정합니다. |
|
|
2 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
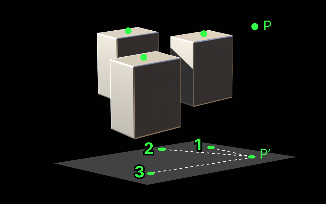
XOY 평면에서 포즈부터 기준점까지의 거리를 기준으로 정렬
사용 방법
참조 포즈
참조 포즈를 설정하는 방법에는 매니퓰레이터로 설정 및 외부 스텝에서 입력 두 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
참조 포즈를 설정하는 방식 |
설명 |
방식 |
예시 그림 |
1 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 참조 포즈를 설정합니다. |
|
|
2 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|