Mech-Interface
외부 통신과의 브릿지 역할을 하는 Mech-Interface는 Mech-Mind 소프트웨어 시스템의 외부 인터페이스 서비스로서 표준 인터페이스 및 *Adapter*를 포함하며 외부 정보를 수신하고 시스템 내부 정보를 보내는 기능을 실현할 수 있습니다. 이 부분에서 주로 Mech-Interface의 두 가지 통신 방식(표준 인터페이스와 Adapter)의 메커니즘, 차이점 및 응용 시나리오에 대해 설명합니다.
통신 메커니즘
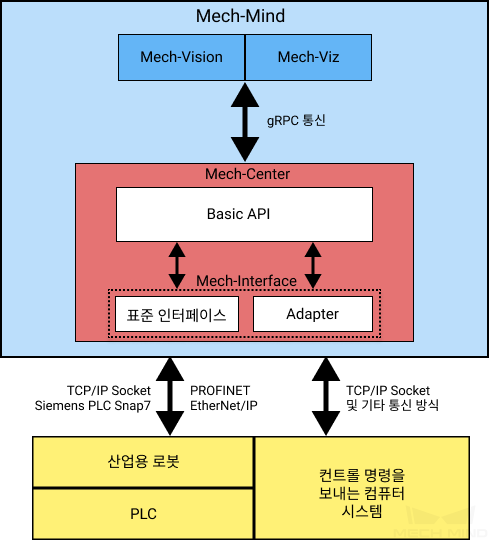
두 가지 통신 방식의 메커니즘은 다음 그림과 같습니다.
-
Adapter는 외부 통신 장치 (산업 로봇, 상위 컴퓨터, PLC)와 Mech-Vision 및 Mech-Viz 소프트웨어를 연결하는 Python 어댑터 프로그램입니다. 내부적으로는 Mech-Vision 및 Mech-Viz와 통신하고 외부적으로는 외부 장치와 통신합니다.
-
표준 인터페이스는 Mech-Mind에서 제공하는 완전한 Adapter 프로그램 세트로, 다양한 통신 프로토콜을 지원하며 강력한 제어 명령어 세트와 비정상적인 경보 시스템을 갖추고 있어 대부분의 사용자 요구를 충족할 수 있습니다.
표준 인터페이스와 Adapter의 비교
Adapter와 표준 인터페이스는 다 외부 장치, Mech-Vision 및 Mech-Viz 소프트웨어와 연결하는 어댑터 프로그램입니다. 표준 인터페이스는 Mech-Mind가 제공하는 고정적인 Adapter 프로그램 세트로 2차 개발 기능을 지원하지 않습니다.
내부적으로는 Basic API를 호출하여 Mech-Vision과 Mech-Viz와 통신하며, 외부적으로는 특정 통신 프로토콜을 통해 외부 장치와 통신합니다.
표준 인터페이스와 Adapter의 자세한 비교는 다음 표에서 볼 수 있습니다.
| 비교 | 표준 인터페이스 | Adapter |
|---|---|---|
내부 통신 |
모두 Basic API를 호출하여 Mech-Vision과 Mech-Viz와 통신합니다. |
|
외부 통신 프로토콜 |
표준 인터페이스는 다음과 같은 통신 프로토콜만 통해 외부 장치와 통신합니다.
|
Adapter는 Python에서 지원하는 통신 프로토콜을 사용하여 외부 장치와의 통신을 지원합니다. |
기능 |
표준 인터페이스는 비전 결과를 제공하는 것만 지원합니다. |
Adapter는 비전 관련 기능뿐만 아니라 인터페이스, 데이터 베이스 및 주문 시스템과 같은 Python 지원 기능을 제공합니다. |
구성 난이도 |
표준 인터페이스는 사용하기 쉽고 신속하게 구성을 완료할 수 있습니다. |
Adapter는 사용자가 프로그램을 작성해야 하며 시간과 인건비가 비교적 높습니다. |
확장 가능성 |
기능 확장을 지원하지 않습니다. |
더 많은 통신 프로토콜과 더 많은 기능을 지원하도록 확장할 수 있습니다. |
응용 설명
실제 응용 시나리오에서 일반적으로 외부 통신 대상, 사용하는 통신 프로토콜 및 프로젝트에서 필요한 통신 기능 등을 고려하여 어떤 유형의 Mech-Interface를 사용할지 결정해야 합니다.
표준 인터페이스와 Adapter가 지원하는 일반적인 통신 대상 및 통신 프로토콜은 다음 표와 같습니다.
| 통신 대상 | 통신 프로토콜 | Mech-Interface 유형 | 설명 |
|---|---|---|---|
로봇 |
TCP/IP Socket |
표준 인터페이스 |
Mech-Interface는 TCP/IP Socket의 서버로 사용됩니다. |
UDP |
Mech-Interface는 UDP의 서버로 사용됩니다. |
||
PROFINET |
Mech-Interface는 PROFINET의 슬레이브 장치로 사용됩니다. |
||
EtherNet/IP |
Mech-Interface는 EtherNet/IP의 슬레이브 장치로 사용됩니다. |
||
Modbus TCP |
Mech-Interface는 Modbus TCP의 슬레이브 장치로 사용됩니다. |
||
마스터 컴퓨터(컨트롤 명령을 보내는 컴퓨터) |
HTTP |
Adapter |
통합 프로젝트에 적합하며 로봇 마스터 제어 모드를 채택합니다. |
WebSocket |
|||
TCP/IP Socket |
표준 인터페이스 |
Mech-Interface는 TCP/IP Socket의 서버로 사용됩니다. |
|
PLC |
TCP/IP Socket |
표준 인터페이스 |
Mech-Interface는 TCP/IP Socket의 서버로 사용됩니다. |
Siemens PLC Snap7 |
Mech-Interface는 지멘스 PLC Snap7의 클라이언트로 사용됩니다. |
||
PROFINET |
Mech-Interface는 PROFINET의 슬레이브 장치로 사용됩니다. |
||
EtherNet/IP |
Mech-Interface는 EtherNet/IP의 슬레이브 장치로 사용됩니다. |
||
Modbus TCP |
Mech-Interface는 Modbus TCP의 슬레이브 장치로 사용됩니다. |
||
미쓰비시 MC |
Mech-Interface는 MC의 클라이언트로 사용됩니다. |
|
표준 인터페이스와 Adapter에 대한 더 자세한 내용을 확인하시려면 다음 내용을 읽어보십시오.