方案常见问题
本节介绍电芯上料方案的常见问题、可能的原因及解决方法。
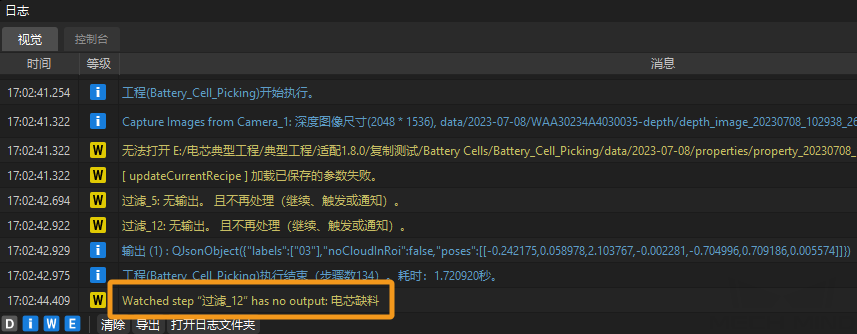
问题二:抓取电芯时存在偏差,但Mech-Vision日志区无报错
解决方法
-
检查机器人绝对精度。
在工作区域内使用示教器控制机器人沿固定方向(例如 X、Y 方向)移动一段距离,移动完成后将该距离与机器人实际移动距离进行对比并测量差值。若偏差较大,需检修或更换机器人。
例如,使用示教器控制机器人沿 X 方向移动 1000 mm,然后测量机器人实际移动的距离,如机器人实际移动了 998 mm,则机器人移动距离误差为 2 mm。
-
通过示教法为电芯添加抓取点,再映射到多个抓取点,从而得到准确的抓取点。
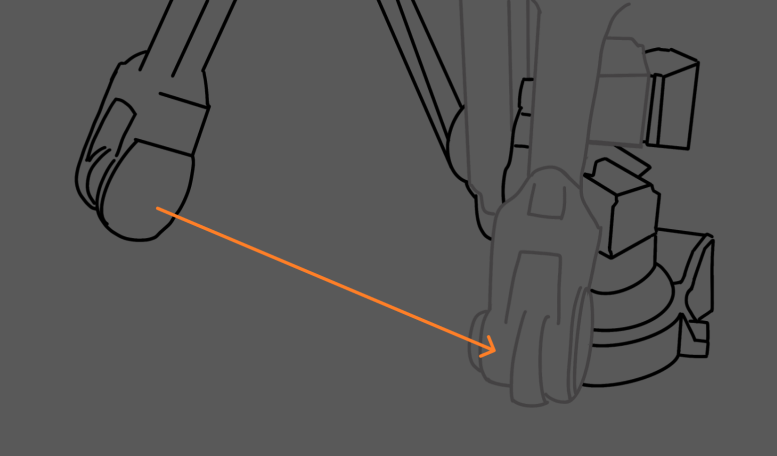
用于抓取电芯的夹具结构复杂且体积较大(如下图所示),可能会导致 TCP 不准确。
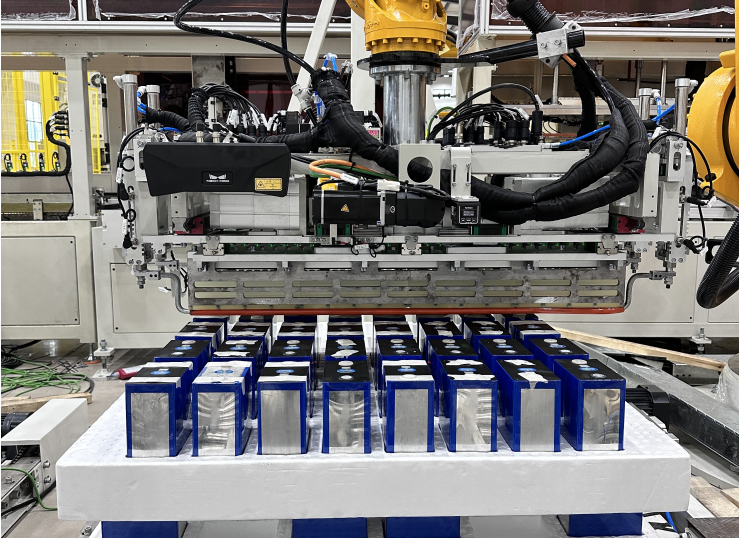
为了保证抓取精度,可通过示教法为电芯添加抓取点,再映射到多个抓取点,从而得到准确的抓取点。