方案使用专题
专题一:识别麻袋正反和朝向
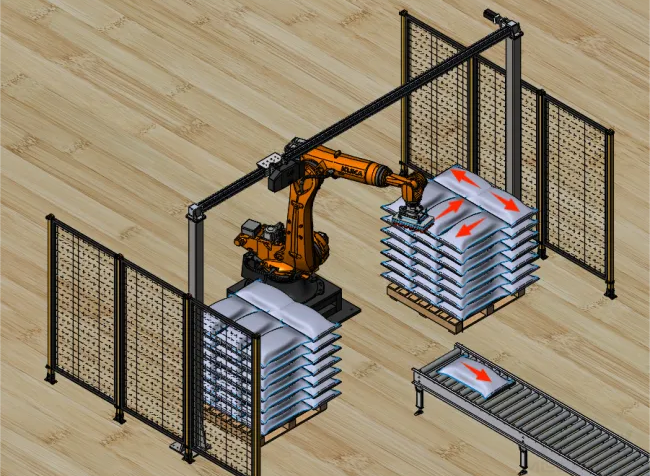
在自动化麻袋抓取的场景中,为了麻袋放置时统一朝向,需识别每个麻袋的正反面和袋口朝向,以便机器人可根据识别结果来调整抓取位姿。
如下图所示,麻袋整垛来料时,各个麻袋袋口的朝向不一致,在将麻袋放置到流水线上时,需使袋口统一朝向同一方向。
本节将介绍如何在麻袋识别流程中识别麻袋正反和袋口朝向。

部署Mech-Vision工程
流程概览
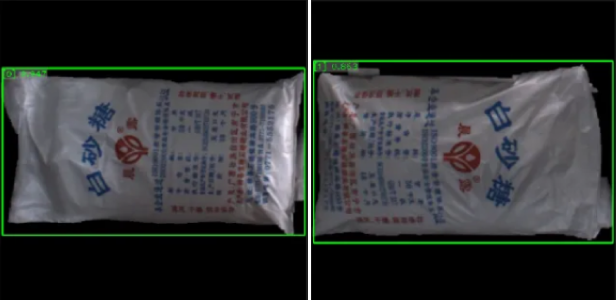
机器人抓取麻袋时,由于吸盘长边和麻袋长边是平行的,所以只需通过深度学习判断位姿是否需绕 Z 轴旋转 180°即可确保麻袋统一朝向放置。
为实现上述功能,可在典型工程的调整位姿步骤组合中增加以下三个步骤组合,用于“识别朝向”和“矫正位姿”。
-
将单个的麻袋彩色图变换至 2D 图中心位置
-
通过深度学习识别麻袋朝向
-
根据标签矫正位姿方向
下文将对新增的步骤组合进行详细解释。
步骤详解
将单个的麻袋彩色图变换至 2D 图中心位置
-
功能说明:
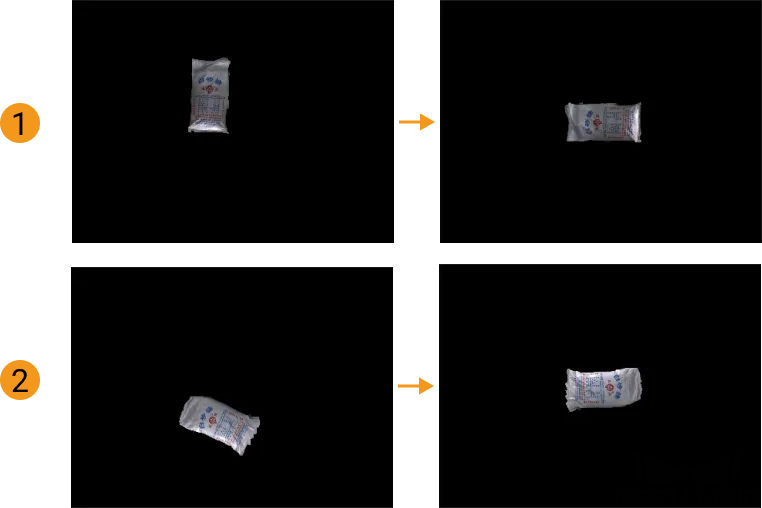
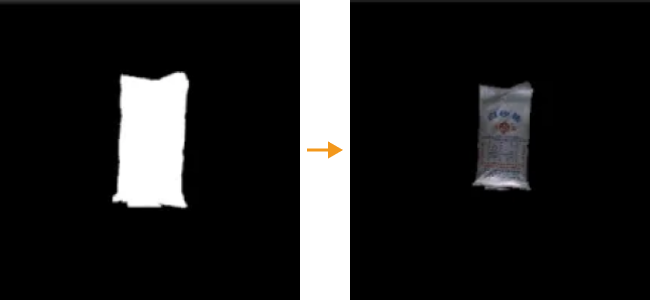
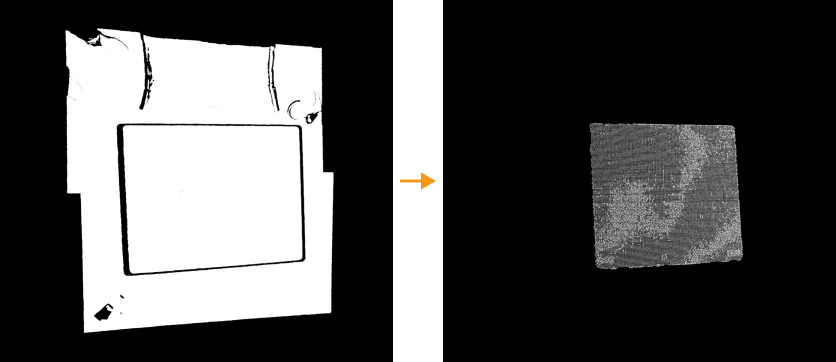
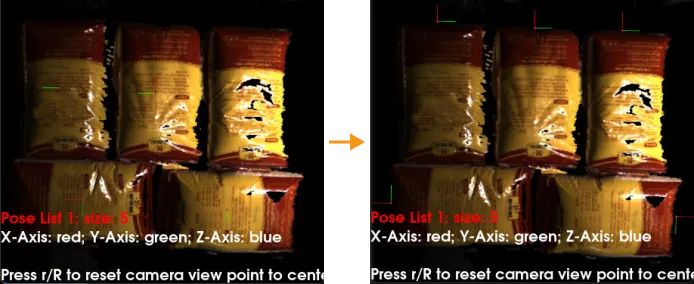
由于麻袋掩膜提取结果多样,为了方便后续进行目标检测,需使用麻袋位姿将彩色图统一变换至整张图像的水平中心位置。
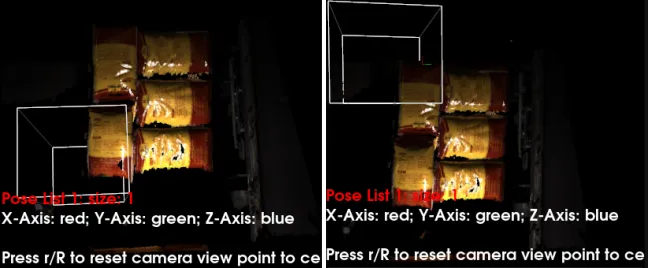
如下图所示,图 1 为将竖直摆放的麻袋变换至 2D 图水平中心位置,图 2 为将倾斜摆放的麻袋变换至 2D 图水平中心位置。
-
内部重点步骤介绍:
步骤 功能说明 处理结果 提取掩膜中对应的图像
该步骤前接将3D点云投影为2D图像步骤后,可将每个麻袋的点云转化为掩膜,然后在原始彩色图上根据掩膜提取单个的麻袋彩色图像。
获取基于工件位姿的四个顶点(步骤组合)
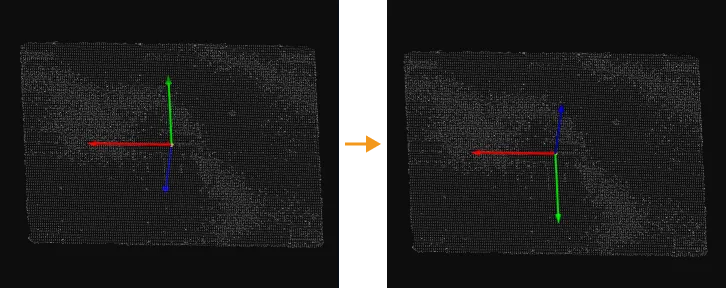
在物体坐标系下,该步骤可根据输入的麻袋位姿生成边长为 20 mm 的矩形顶点位姿,这四个顶点位姿在转换为 2D 位姿后,可为透视变换处理提供足够的自由度,来确定麻袋彩色图像的起始位置和方向。
-
设置基准位姿(步骤组合)
该步骤可将麻袋位姿的 X、Y 值设置为 0,同时将四元数设置为单位四元数,得到在当前高度下的相机中心位姿。
-
获取基于基准位姿的四个顶点(步骤组合)
使用新的位姿在物体坐标系下生成边长为 20 mm 的矩形顶点位姿,这四个顶点位姿在转换为 2D 位姿后,为透视变换处理提供足够的自由度,来确定麻袋彩色图像的目标位置和方向。
-
透视变换
根据输入的透视变换前的点和透视变换后的点获得变换矩阵,然后利用此变换矩阵,将输入的彩色图变换至目标位置,即变换到 2D 图水平中心位置。
-

专题二:拆垛完成后识别并抓取托盘
在自动化麻袋抓取的场景中,拆垛完成后需要识别并抓取托盘。本节将介绍如何进行托盘的识别和抓取。


部署Mech-Vision工程
步骤详解
点云预处理
-
功能说明:
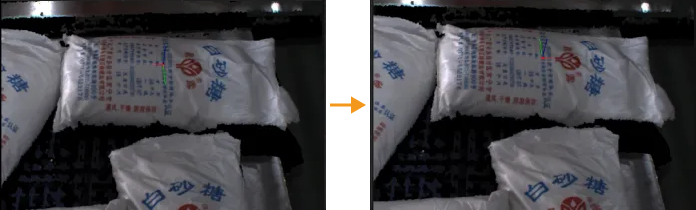
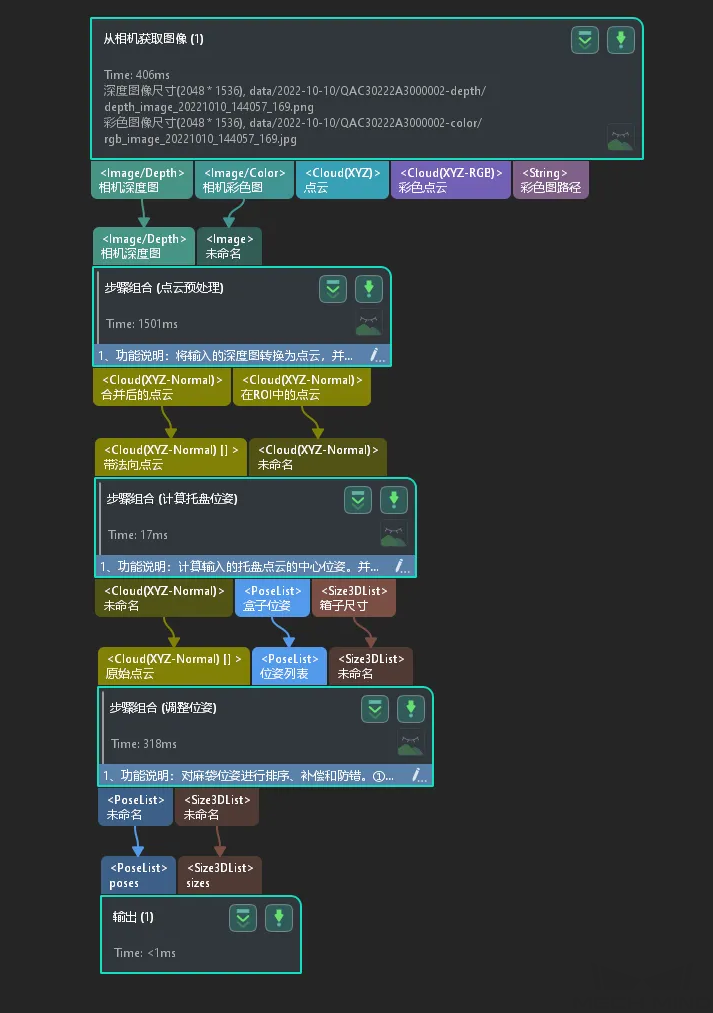
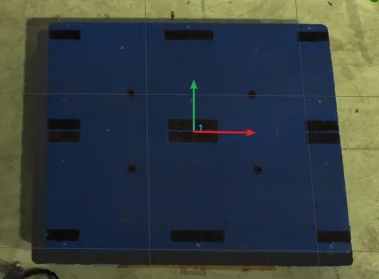
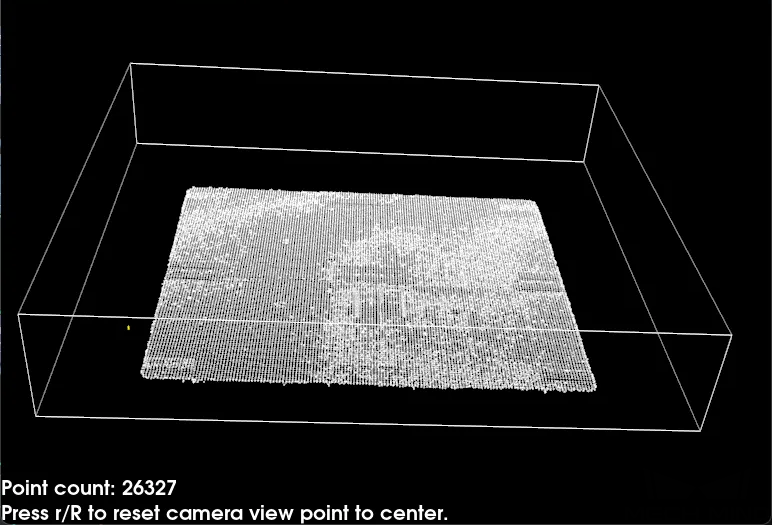
该步骤组合可根据相机采集的深度图生成点云,然后通过设置感兴趣区域、获取最高层点云等方式,去除其他场景点云,只输出托盘点云,以便后续准确计算托盘位姿。
如下图所示,左图为预处理前的点云,包含场景点云和托盘点云;右图为预处理后的点云,只包含托盘点云。
专题三:使用双夹爪桁架机器人进行麻袋拆垛
在双夹爪桁架机器人抓取麻袋的场景中,为实现一次抓取多个麻袋,需识别全部麻袋并按照规则对位姿进行排序,以便两个夹爪可同时抓取麻袋。本文将介绍双夹爪桁架机器人如何进行麻袋拆垛。
适用场景
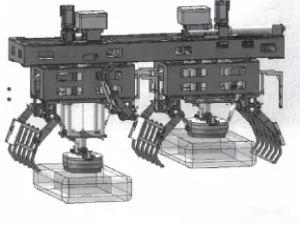
该专题适用于来料规整,且只有两种垛型的麻袋。桁架机器人拆垛时,每个夹爪可绕 Z 轴旋转。

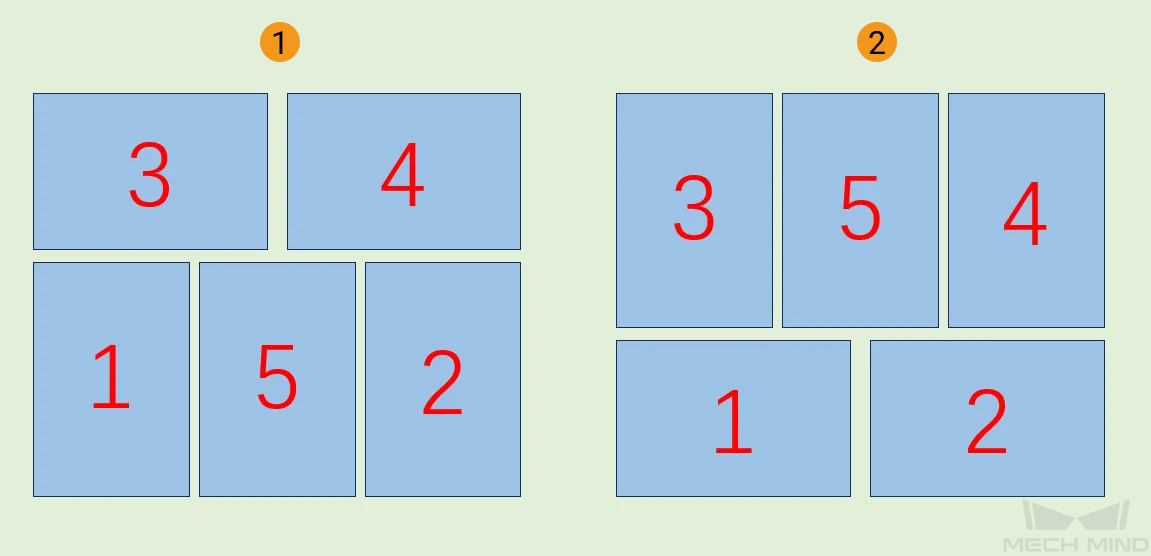
在满垛情况下,桁架机器人获取到一层麻袋的位姿和标签后,,将根据标签顺序先用双夹爪抓取标签 1 和标签 2 对应的麻袋,再用双夹爪抓标签 3 和标签 4 对应的麻袋,最后用单夹爪抓取标签 5 对应的麻袋。
部署Mech-Vision工程
流程概览
双夹爪桁架机器人进行麻袋拆垛时,需识别全部麻袋并按照规则对位姿进行排序,本专题在典型工程的基础上,修改了调整位姿步骤组合,删除了二维排序、提取麻袋上表面点云重新计算、调整麻袋位姿至上表面点云中心步骤组合,增加了以下三个步骤组合:
-
移动位姿至麻袋短边中心
-
判断位置标签并对位姿排序
-
防错—判断是否有漏识别

下文将对新增的步骤组合进行详细解释。
步骤详解
移动位姿至麻袋短边中心
-
功能说明:
该步骤组合可将麻袋的位姿移动至远离垛心的短边中心,用于后续准确判断位姿标签,并减少麻袋位置波动所产生的影响。
-
内部重点步骤介绍:
步骤 功能说明 使位姿的轴旋转至指定方向
该步骤可矫正位姿的 Z 轴,使 Z 轴竖直朝上。
计算平面点云的位姿和尺寸
该步骤可根据整垛的麻袋点云计算垛心位姿。
使位姿的轴指向参考点
该步骤可将麻袋中心位姿的 X 轴按 180° 对称性旋转至垛心方向。
围绕指定轴旋转位姿
该步骤可将位姿绕 Z 轴旋转 180°,使位姿的 X 轴指离垛心。
沿指定方向移动位姿
该步骤可将位姿从麻袋中心移动至麻袋短边中心。
判断位置标签并对位姿排序
-
功能说明:
该步骤组合可基于两种垛型设置五个 3D ROI,判断位姿是否在 3D ROI 内,并根据判断结果给 ROI 内的有效位姿添加相应的位姿标签。然后将位姿从麻袋短边中心移回至麻袋中心,并根据索引对位姿和位姿标签重新排序。
-
内部重点步骤介绍:
步骤 功能说明 处理结果 判断位姿是否在3D ROI内
该步骤可根据来料垛型设置五个 3D ROI,判断位姿是否在对应的 3D ROI 内,并根据结果给 ROI 内的有效位姿添加位姿标签。
沿指定方向移动位姿
该步骤可将位姿从麻袋短边中心移回至麻袋中心。
-
使位姿的轴指向参考点
该步骤可将麻袋中心位姿的 X 轴按 180° 对称性旋转指向机器人原点。
-
按照索引对元素重排序
该步骤可按照索引列表对麻袋位姿和位姿标签重新排序。
-