工位布局设计
电芯上料方案设计前期,需进行工位布局设计,本节将分别对该方案中涉及到的两种工位布局进行介绍。
布局一
-
布局介绍:
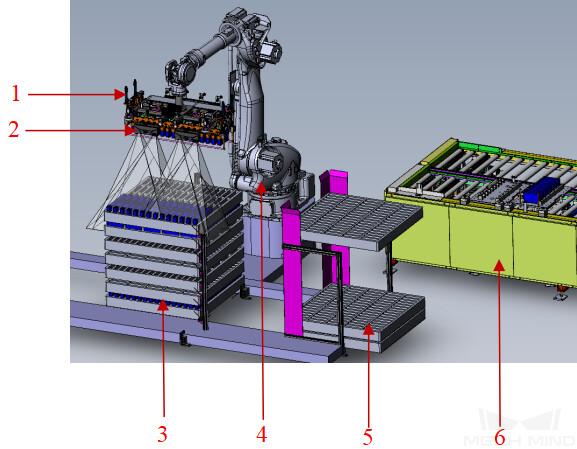
在该布局中,两台 Pro S 相机安装在夹具同侧(EIH),两台相机同时拍照后,获取一行或一列电芯点云,然后采用点云拼接的方法将两台相机的识别结果进行合并,最后生成一排或一列电芯的抓取点。该布局优缺点如下:
-
优点:视觉识别精度高。
-
缺点:由于使用了点云拼接方法,导致视觉节拍较慢。
-
-
布局图示:
该布局如下图所示,图中各部分为:1-夹具;2-PRO S 相机;3-抓取工位;4-机器人;5-空托盘堆放工位;6-放置工位。
布局二
-
布局介绍:
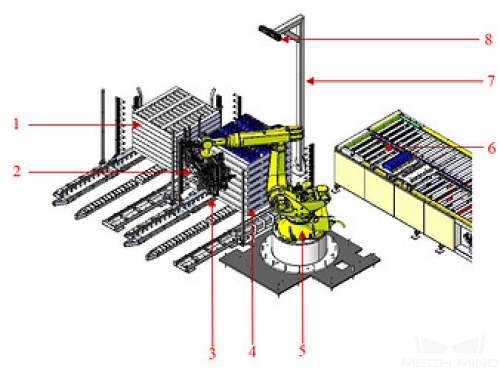
在该布局中,使用了一台 LSR L 相机和一台 PRO S 相机。其中,LSR L 相机安装在相机支架上,负责识别电芯位姿;PRO S 相机安装在夹具上,负责判断电芯正负极和计算电芯长度、宽度等尺寸信息。该布局优缺点如下:
-
优点:视觉节拍较快。
-
缺点:LSR L 相机点云质量较差,不易进行防错处理。
-
-
布局图示:
该布局如下图所示,图中各部分为:1-空托盘堆放工位;2-PRO S相机;3-夹具;4-抓取工位;5-机器人;6-放置工位;7-LSR L相机支架;8-LSR L 相机、
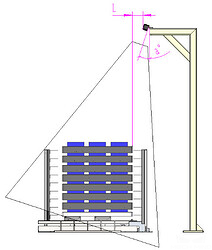
若由于电芯反光问题无法获取其位姿,可将相机沿水平方向移出电芯垛(如下图 L 处所示),避免电芯出现过曝情况。此外,还可调整相机的倾斜角度a,以确保相机视野能够覆盖整个电芯垛。