风险评估及应对策略
在方案部署过程中,将会存在若干风险,本节将对可能遇到的风险进行评估,并提供对应的应对策略。
轴棒过长
-
风险:当轴棒长度超出相机视野时,因为相机只能识别轴棒的一端或中心部位,无法获取完整轴棒的点云,所以难以准确获取轴棒轴向的中心位置。
-
应对策略:对于对长度方向放置精度要求较高的情况,可考虑增加气缸等辅助装置,用于使轴棒的一端齐平。

轴棒反光
-
风险:表面反光的轴棒更容易受到外界光线的影响,导致获取的轴棒点云出现局部缺失的现象,从而影响视觉识别成功率和定位精度。
-
应对策略:搭建遮光棚或采取其它遮光措施,如贴遮光膜,为相机提供稳定的光照环境,从而提高获取到的点云质量。具体内容可参考遮光方案。

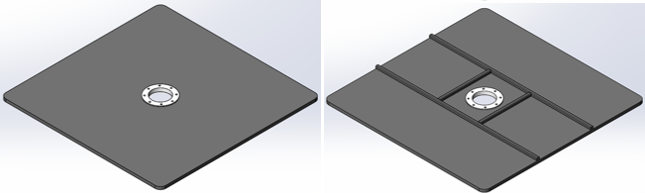
隔板硬度差
-
风险:隔板硬度差,实际使用中可能遇到如下问题。
-
隔板易变形,导致夹具无法将隔板抓起。
-
夹具抓取隔板后,隔板易掉落。
-
-
应对策略:选用材料硬度较高的隔板,或在隔板上焊接型材肋板,增加隔板强度。

料筐壁硬度差
-
风险:料筐壁由铁网焊接,实际使用中遇到如下问题。
-
长期使用后,料筐壁变形严重(内凸或外凹),给抓取带来极大困难。
-
料筐壁上边缘点云稀疏,动态更新料筐时难以准确识别料筐实际位置。

-
-
应对策略:料筐壁采用方钢或其他高强度材料,并且在后期使用过程中应不断检查维护。

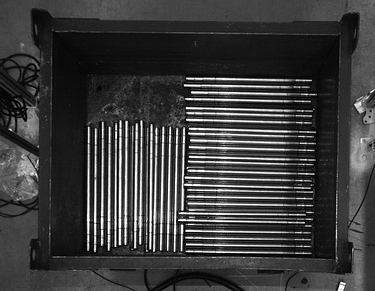
料筐底部光滑
-
风险:料筐底部比较光滑平整,轴棒在料筐底部的位置容易改变。相机拍照后获取轴棒位姿后,若轴棒滚动后实际位置发生改变,将导致机器人无法正常抓取轴棒。

-
应对策略:料筐底部铺设摩擦力大的垫板或仿型垫板。
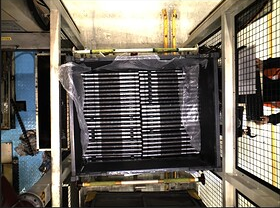
料筐内薄膜遮挡轴棒
-
风险:当料筐内壁附有薄膜时,薄膜可能会遮挡轴棒,导致轴棒无法被识别,或机器人夹取时夹具与薄膜发生碰撞,从而无法准确抓取。
-
应对策略:去除薄膜,并更换其它包装形式或约束来料,确保料筐内的薄膜不遮挡工件。
轴棒反光且来料方向随机
-
风险:对于有序来料且表面反光的轴棒,轴棒的轴线方向与相机的条纹方向的夹角是随机的。当轴棒的轴线方向与相机的条纹方向平行时,相机获取的点云质量最差,从而影响视觉识别的成功率和定位精度。
-
应对策略:
-
建议将轴棒来料姿态统一为一个朝向。
-
采用双相机方案,两个相机相互垂直安装,视野覆盖整个料筐。
-

