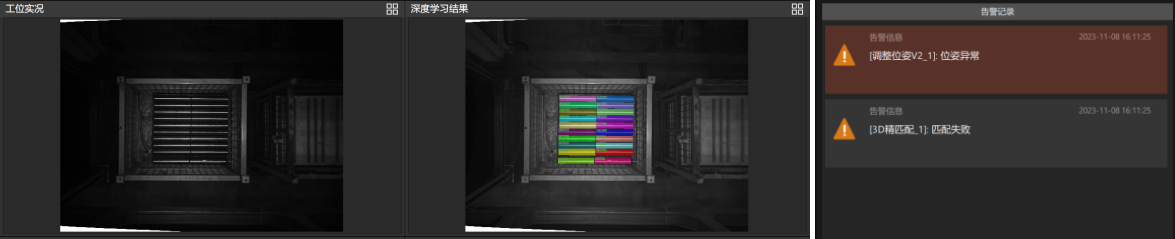
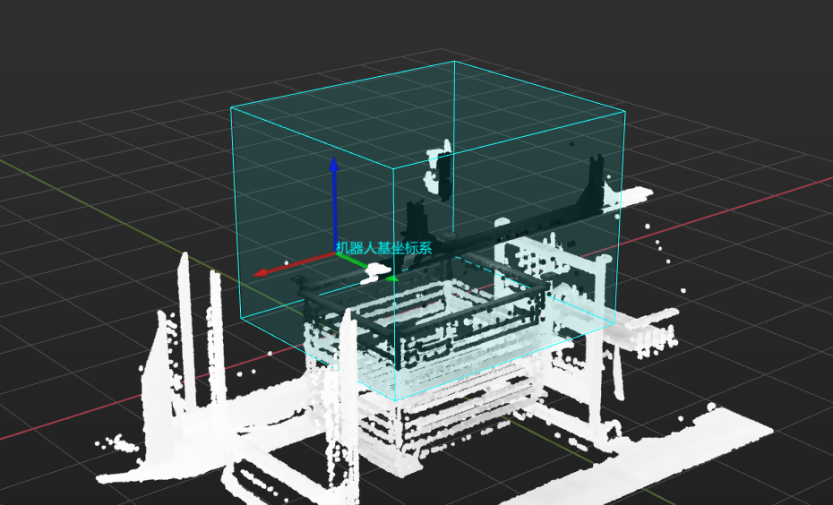
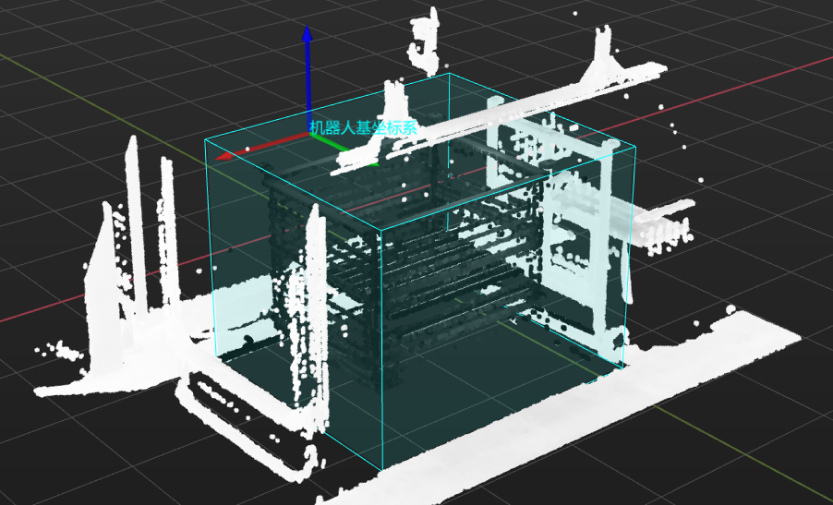
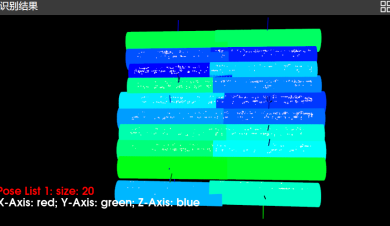
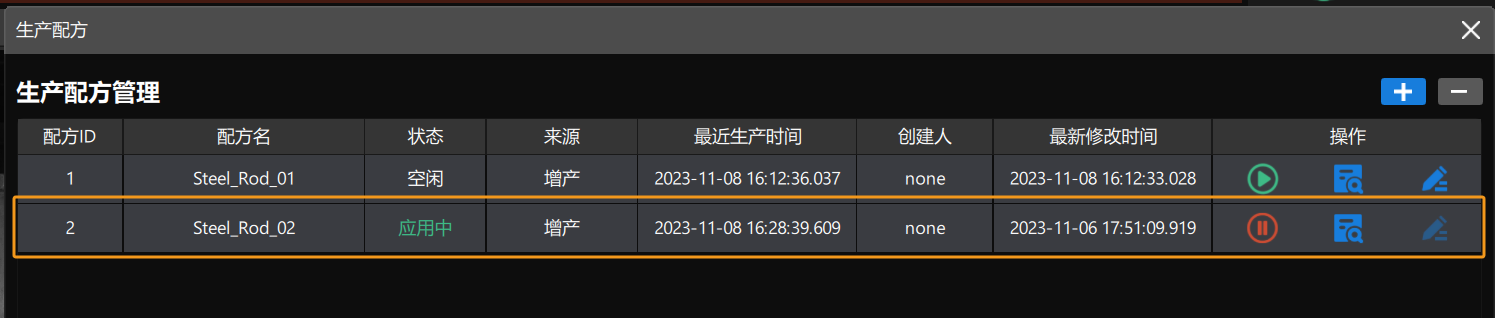
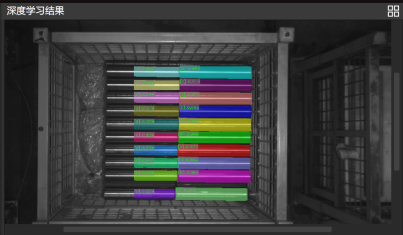
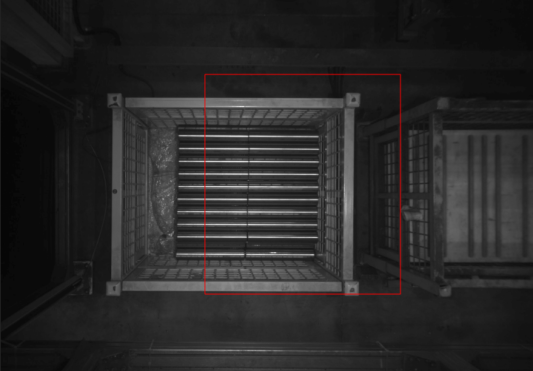
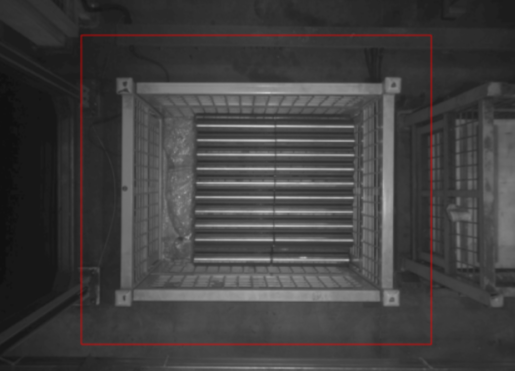
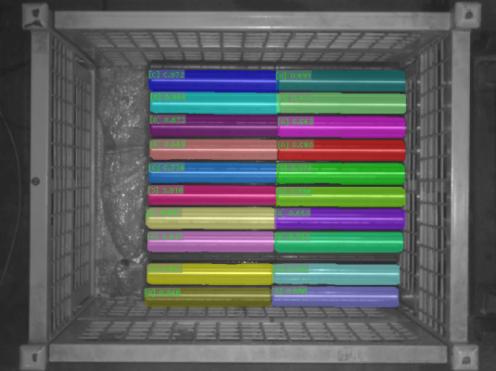
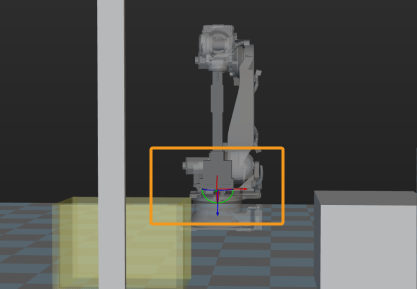
方案常见问题 本节介绍有序轴棒上料方案的常见问题、可能的原因及解决方法。 问题一:3D匹配失败,输出位姿异常。 问题现象 生产界面“工位实况”显示有工件,且“深度学习结果”正常(如下图中左图所示),但是Mech-Vision工程没有输出识别结果和抓取结果,导致告警记录提示匹配失败和位姿异常(如下图中右图所示)。 可能原因 点云预处理步骤组合中的 3D ROI 设置不正确,未包含整个料筐。 解决方法 根据实际情况,重新设置 3D ROI。需保证绿色方框包含整个料筐并留有一定的余量,且框内不包含其他干扰点云。 问题二:视觉识别结果异常 问题现象 生产界面“识别结果”显示工件之间存在重叠,且彩色点云模板和白色工件点云大小不匹配。 可能原因 在生产界面中使用了错误的生产配方。例如,当前所用工件型号对应的是生产配方 1,但实际使用的是生产配方 2。 解决方法 明确当前所用工件的型号,然后使用正确的生产配方。例如,当前所用工件型号为型号 1,则需使用工件型号 1 对应的生产配方 1。 问题三:使用深度学习获得的掩膜异常 问题现象 生产界面“深度学习结果”显示掩膜异常。 可能原因 深度学习识别区域(2D ROI)设置不正确。 采集 2D 图时,曝光时间设置不合理,导致 2D 图过亮或过暗。 无法使用该深度学习模型稳定识别当前工件。 解决方法 重新设置 2D ROI。需保证设置的 2D ROI 包含料筐上表面,同时 ROI 内尽量不包含其它干扰点云。 调整相机曝光时间,确保采集到的 2D 图正常。 采集轴棒图像数据,对深度学习模型进行迭代。深度学习识别正常时如下图所示。 问题四:路径规划失败,机器人与场景物体碰撞 问题现象 使用Mech-Viz运行工程时,提示“路径规划失败,与场景物体碰撞”。 可能原因 路径点设置不合理。 解决方法 查看规划历史,检查碰撞发生在哪个步骤,然后根据现场布局调整路径点。 例如,在抓取后料筐上方定点,机器人与料筐发生了碰撞,如下图所示。 此时,需调整抓取后料筐上方定点步骤,将该步骤对应的路径点设置为料筐上方,如下图所示。 方案使用专题 电芯上料