风险评估及应对策略
在方案部署过程中,将会存在若干风险,本节将对可能遇到的风险进行评估,并提供对应的应对策略。
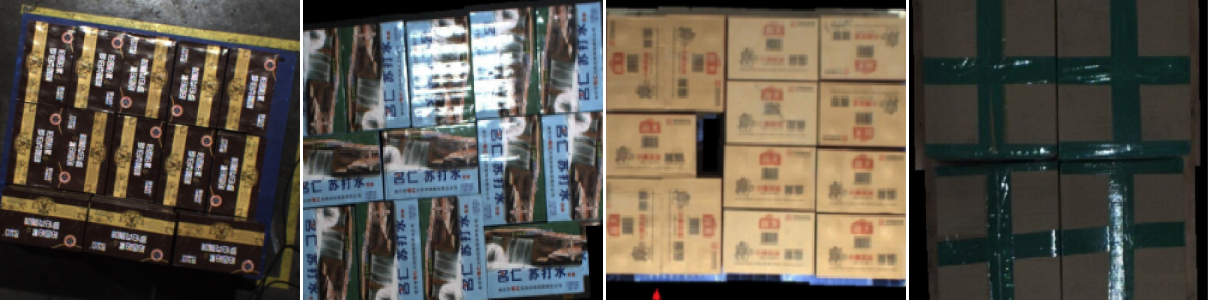
纸箱表面有特殊颜色、纹理
-
风险:当纸箱表面有特殊颜色(纯黑)、特殊花纹(两相邻纸箱的花纹可拼接成一个新的完整纸箱)、胶带扎带等干扰时,可能会造成视觉识别错误。
-
应对策略:目前,深度学习不易稳定识别该类纸箱,需在需求评估时尽量剔除该类纸箱,避免该类纸箱的拆垛需求。
纸箱长、宽差值过小
-
风险:当纸箱上表面长、宽差值过小(差值 ≤20 mm),即纸箱上表面接近正方形时,可能导致纸箱朝向判断错误。
-
应对策略:如需识别上表面接近正方形的纸箱的朝向,可在拆垛后安装 2D 相机,用于解决纸箱朝向判断。
现场光照不稳定
-
风险:现场光照、建筑阴影等因素可能会造成纸箱表面过亮、过暗,从而导致纸箱识别错误。常见环境因素包括:
-
厂房内存在阳光或环境光线干扰,导致纸箱表面过亮。
-
墙柱遮挡光线,造成纸箱表面存在阴影。
-
白天、夜晚的光照发生变化,导致纸箱表面过亮或过暗。
-
-
应对策略:根据实际的机器人工位情况进行补光、遮光,具体内容可参考遮光方案。
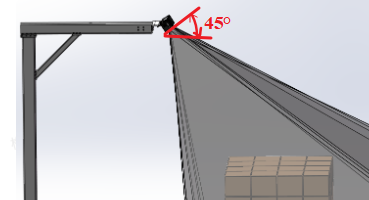
相机支架滑轨定位精度低
-
风险:相机支架上装有滑动装置时,由于滑轨定位精度低,导致机器人抓取不准确。
-
应对策略:建议采用钢架结构的相机支架,在需要加装滑动装置时,须使用滑轨定位精度小于 0.1 mm 的伺服电机。
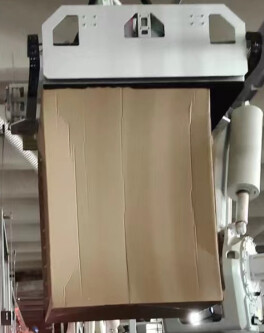
纸箱上表面平整度差
-
风险:当纸箱上表面平整度差时,吸盘无法牢固吸取纸箱,此时由于机器人运动时存在惯性,极易甩掉纸箱。

-
应对策略:需严格检查来料纸箱的平整度,通常要求来料纸箱的平整度小于 10 mm,否则建议剔除该纸箱。
瓦楞纸较厚
-
风险:当瓦楞纸较厚时,纸箱表面与吸盘接触的部分气密性较差,无法保证纸箱被稳定吸取。
-
应对策略:通常要求瓦楞纸厚度至少为 3~5 层(具体需根据产品重量考虑),对于无法满足要求的纸箱,建议对其进行剔除。

纸箱表面存在塑封薄膜
-
风险:纸箱表面塑封薄膜易老化、漏气,导致纸箱表面受力能力较差,使用真空夹具抓取时纸箱易掉落。此外,相机正下方纸箱表面易过曝,影响视觉识别效果。

-
应对策略:提前测试纸箱塑封薄膜表面的吸附稳定性,并根据实际情况调整相机参数或拍照角度,避免纸箱表面过曝。
纸箱表面存在打包带
-
风险:纸箱表面存在打包带时,如果选用波纹吸盘,需避免吸盘吸取到打包带。此外,打包带具有反光特性时,容易导致纸箱识别失败。

-
应对策略:应避免吸盘吸取到打包带,并建议增大安全系数,提升吸盘有效吸力。同时还需避免使用有反光特性的打包带,如无法避免,建议提前进行深度学习模型训练。


