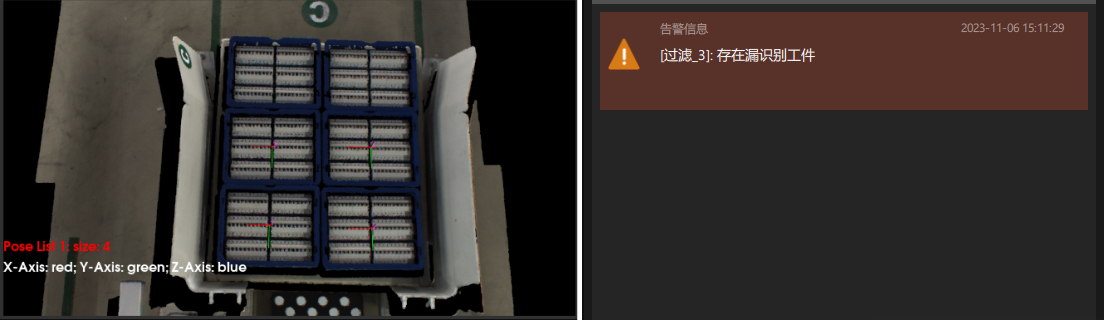
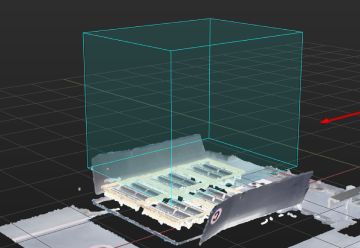
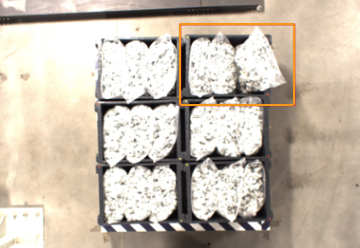
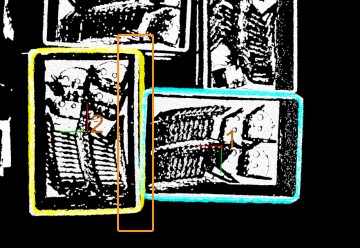
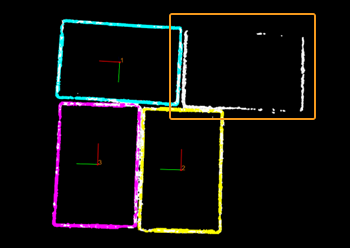
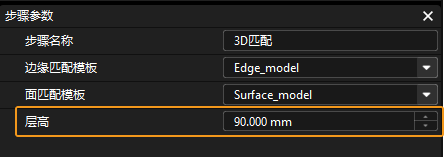
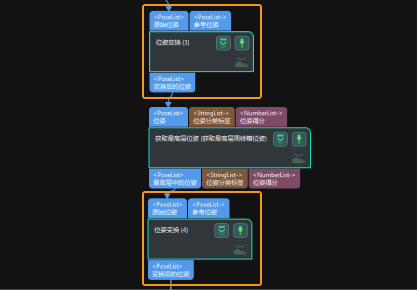
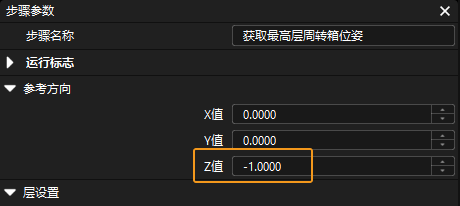
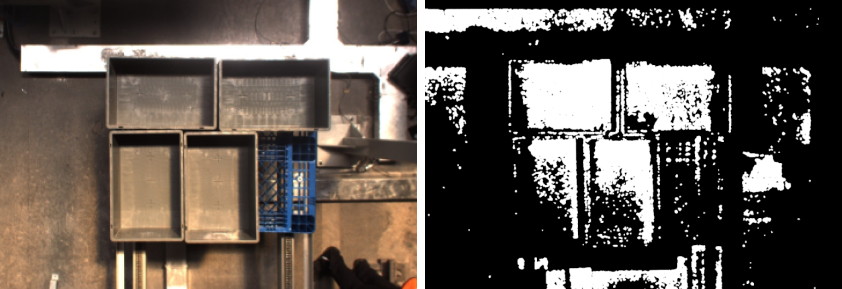
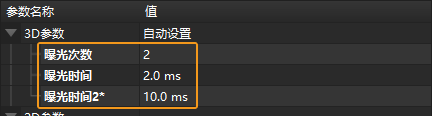
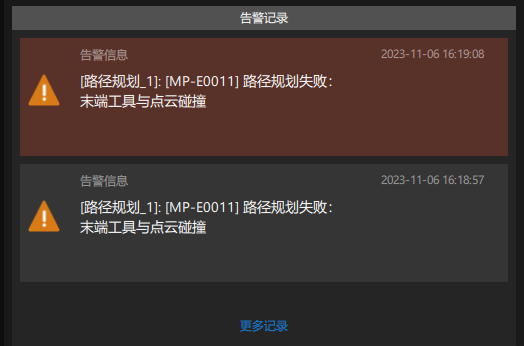
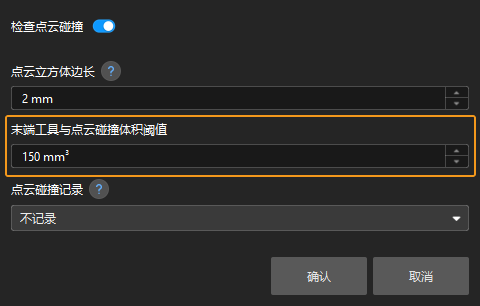
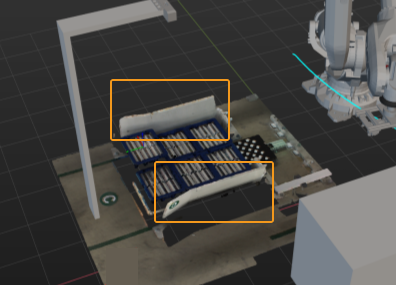
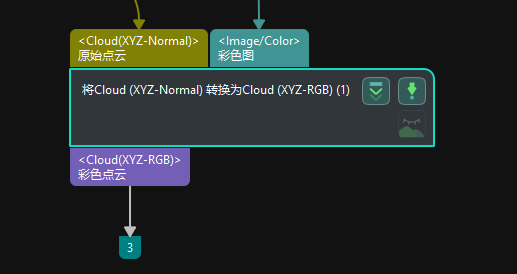
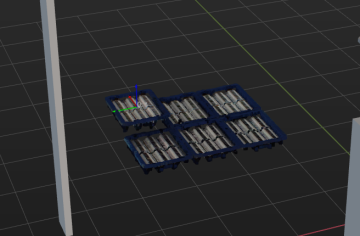
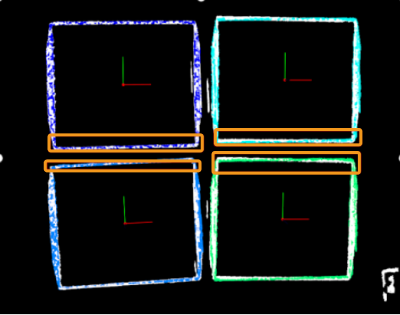
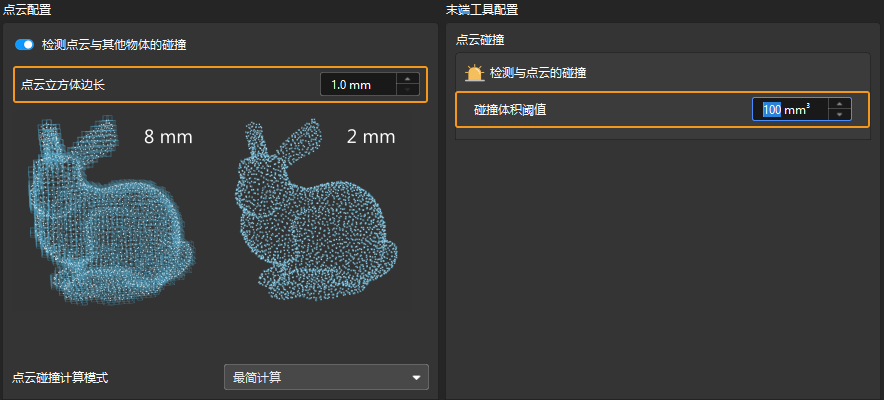
方案常见问题 本节介绍周转箱拆垛方案的常见问题、可能的原因及解决方法。 问题一:3D 匹配失败或存在漏识别的周转箱 问题现象 生产界面的“抓取顺序”画面显示输入的图像中包含六个周转箱,但只输出了四个周转箱位姿(如下图中左图所示),导致生产界面告警记录提示“存在漏识别工件”(如下图中右图所示)。 可能原因 3D ROI 设置错误,周转箱不在 3D ROI 内,导致Mech-Vision工程无输出或漏识别。 周转箱内物料遮挡周转箱上边缘(如下图所示),导致 3D 匹配得到的周转箱位姿得分较低,Mech-Vision工程无输出。 周转箱存在较严重的变形,或周转箱尺寸差异较大,与点云模板存在显著差异,导致 3D 匹配得到的周转箱位姿得分较低,Mech-Vision工程无输出。 周转箱点云质量较差(如下图所示),导致 3D 匹配得到的周转箱位姿得分较低,Mech-Vision工程无输出。 最高层周转箱位姿步骤的层高参数设置不正确。 机器人安装方式为倒装或者倾斜安装。 解决方法 根据工作站布局和垛型尺寸重新设置 3D ROI,使周转箱不超出 ROI。 规范来料,使物料不超出周转箱且不遮挡周转箱上边缘。 在实际生产过程中,确保周转箱无形变。如发现周转箱发生形变,应将其淘汰。 为了获得质量合格的点云,建议使用Mech-Eye Viewer调整相机曝光。具体调整思路可参考问题二。 将层高参数调整为被周转箱标准高度。 如果机器人安装方式为倾斜安装,需在相机坐标系下获取最高层周转箱的位姿。 首先删除3D匹配步骤组合中获取最高层位姿步骤前后的位姿变换步骤,将获取最高层位姿步骤与合并数据步骤相连。 然后调整获取最高层周转箱位姿步骤参数,将参考方向的Z 值设置为-1。 问题二:周转箱点云质量较差 问题现象 获取到的周转箱点云质量较差。如下图所示,左图为周转箱彩色图,右图为周转箱点云。 可能原因 现场环境光线过强。 相机 3D 曝光参数设置不合适。 解决方法 当环境光线过强时,推荐使用较长的曝光时间,提高图像质量。当环境光线过强且增加曝光时间无效时,可以考虑对工位进行遮光处理,使工位的环境光线强度保持恒定。 白色周转箱容易导致采集到的图像过亮,推荐使用较短的曝光时间;黑色周转箱容易导致采集到的图像过暗,推荐使用较长的曝光时间。 当周转箱颜色多样时,推荐使用较短曝光时间与较长曝光时间相结合的方式来采集图像,即在Mech-Eye Viewer中设置两次曝光,如下图所示。 问题三:路径规划失败,末端工具与点云碰撞 问题现象 路径规划失败,生产界面告警记录提示“末端工具与点云碰撞”。 可能原因 物料超出周转箱,机器人仿真抓取周转箱时与物料发生碰撞。 机器人仿真抓取周转箱时,检测到末端工具与点云的碰撞体积超过碰撞体积阈值。 解决方法 规范周转箱来料,确保物料不超出周转箱。 调整点云碰撞检测配置中的末端工具与点云碰撞体积阈值。 问题四:Mech-Viz中点云噪点较多,或存在与抓取无关的场景点云 问题现象 发送到Mech-Viz中的点云噪点较多,或存在与抓取无关(ROI 以外)的场景点云。 以下图为例,Mech-Viz三维仿真空间中包含与抓取无关的场景点云。 可能原因 发送到Mech-Viz的点云未进行点云预处理。 解决方法 由于将Cloud (XYZ-Normal) 转换为Cloud (XYZ-RGB)步骤第一输入端口输入的是预处理后的点云,所以需在该步骤后连接发送点云到外部服务步骤,将预处理后的点云发送到Mech-Viz。 如下图所示,该步骤的彩色点云输出端口被连接到了路径规划步骤的碰撞点云输入端口。 点云预处理后,Mech-Viz三维仿真空间中的点云如下图所示,去除了与抓取无关的场景点云。 问题五:抓取时,夹具可能与周转箱发生碰撞 问题现象 机器人抓取周转箱时,夹具可能与周转箱发生碰撞。 可能原因 机器人抓取周转箱过程中,夹具需要伸进两个相邻周转箱的缝隙中(如下图所示),因此容易发生碰撞。 解决方法 为了避免抓取过程中发生碰撞,需使用Mech-Viz进行碰撞检测,碰撞检测配置方法如下。 在Mech-Viz中导入对应的夹具模型后,在功能面板底部单击碰撞检测,然后在功能面板顶部单击碰撞检测配置,打开“碰撞检测配置”窗口。 在“碰撞检测配置”窗口中开启检测点云与其他物体的碰撞,然后根据实际情况设置点云立方体边长和碰撞体积阈值。 方案使用专题