方案使用专题
专题一:识别尺寸较小的盒体
本节将介绍如何调整Mech-Vision步骤参数,以识别尺寸较小的盒体。
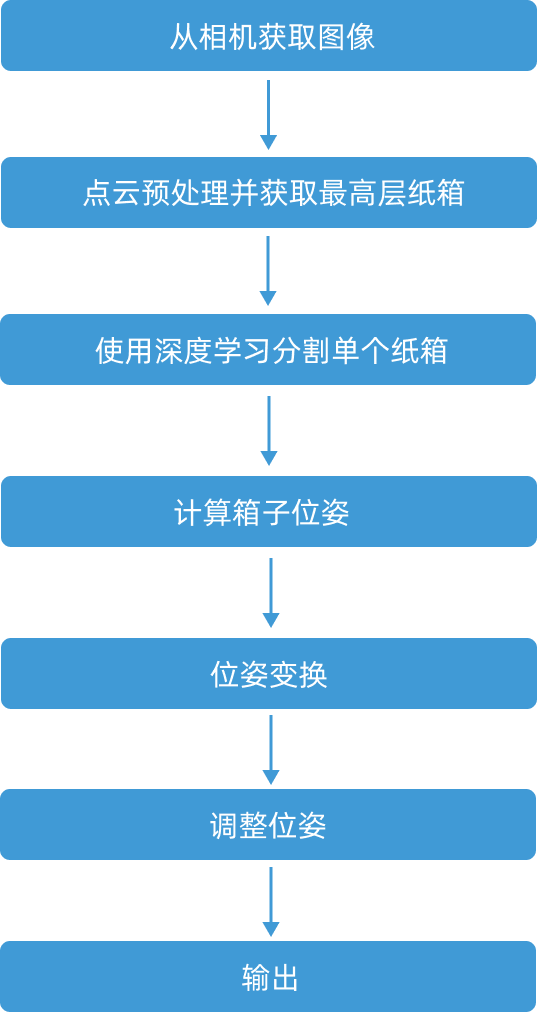
部署Mech-Vision工程
步骤详解
如需识别尺寸较小的盒体,需调整单品类纸箱拆垛方案中的步骤参数,以确保小尺寸盒体能被准确识别。
以肥皂盒为例,下文介绍如何调节Mech-Vision步骤参数。
读取物体尺寸
-
步骤所在位置:
-
需调节的参数:X 轴上的长度、Y 轴上的长度、Z 轴上的长度
-
参数解释:该参数表示箱子的标准尺寸,判断被识别物体的尺寸是否符合要求。
-
调节说明:根据真实纸箱的标准长、宽、高来设置上述参数。
-
点云聚类
-
步骤所在位置:
-
需调节的参数:类的最小点数
-
参数解释:该参数表示点云中的点数下限。如果点云的点数少于该值,则该点云被视为噪声点或离群点,从而被舍弃。
-
调节说明:需根据实际的单个肥皂盒点云数量进行调整,调整后需确保类的最小点数大于干扰点云的点数,并且小于单个肥皂盒点云点数。
-
调节示例:如果单个肥皂盒点云点数约为 600,最大的噪声点数量约为 200,则推荐将类的最小点数设置为 400。
-
点云聚类 并输出符合条件的点云
-
步骤所在位置:
-
需调节的参数:最小点数
-
参数解释:同点云聚类步骤中的类的最小点数。
-
调节说明:同点云聚类步骤中的类的最小点数。
-
调节示例:同点云聚类步骤中的类的最小点数。
-
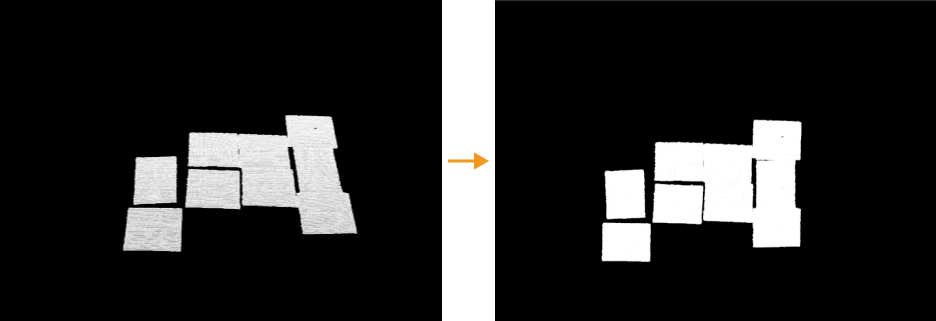
使用深度学习分割单个箱子掩膜(步骤组合)
-
步骤所在位置:该步骤组合位于工程最外层。
-
需调节的参数:深度学习感兴趣区域
-
参数解释:该参数用于设置深度学习感兴趣区域。
-
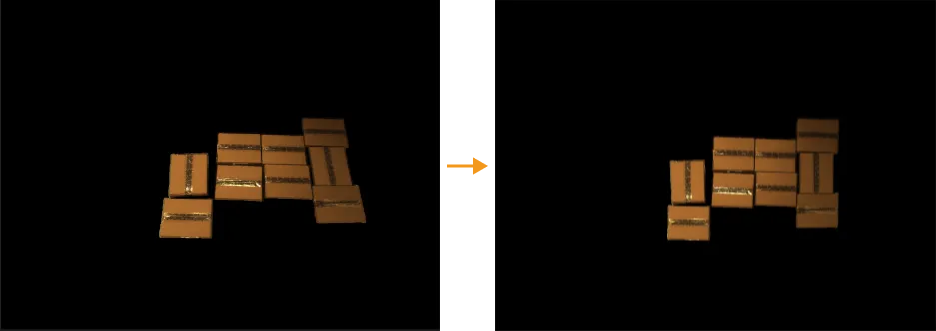
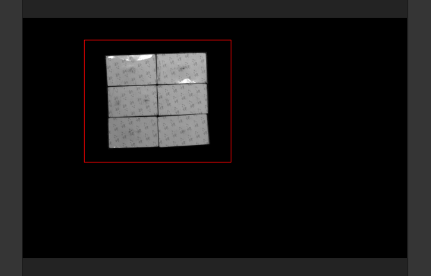
调节说明:设置的感兴趣区域需覆盖最上层盒体,且上、下、左、右留有约三分之一垛型尺寸的余量。
-
调节示例:以肥皂盒为例,深度学习感兴趣区域设置如下图所示。
-
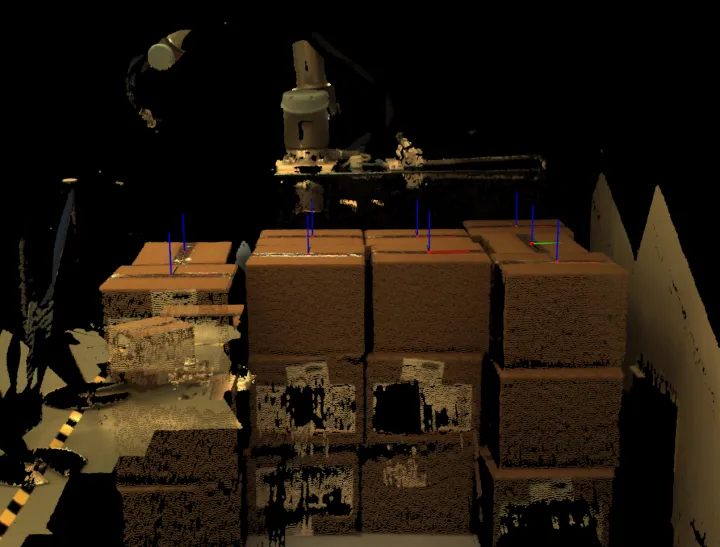
调整位姿V2
-
步骤所在位置:该步骤位于工程最外层。
-
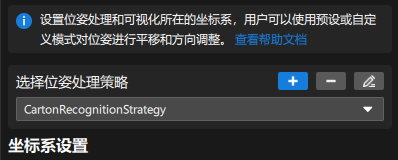
需调节的参数 1:选择位姿处理策略
-
参数解释:该参数用于选择位姿处理策略。
-
调节说明:目前步骤中已内置默认策略和纸箱排序策略以供选择和修改。如需添加其他位姿处理策略,可单击+按钮进行添加。
-
-
需调节的参数 2:位姿调整
-
参数解释:该参数用于对位姿的方向和位移进行调整,分为预设模式和自定义模式。
-
调节说明:该参数的调节方法可参考位姿调整。
-
-
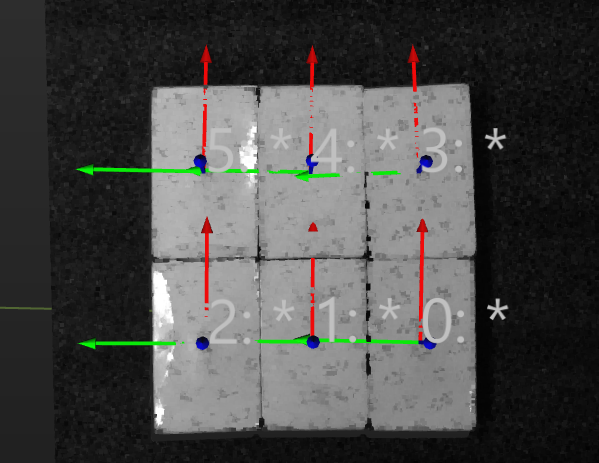
需调节的参数 3:位姿排序
-
需调节的参数 4:位姿过滤
-
参数解释:该参数用于对倾斜严重和超出识别区域的纸箱位姿进行过滤。
-
调节说明:该参数的调节方法可参考位姿过滤。
-
-
需调节的参数 5:设置新增端口数量
-
参数解释:该参数用于将需要排序的数据所对应的输出端口连接至新增的输入端口。
-
调节说明:该参数的调节方法可参考设置新增端口数量。
-


专题三:如何使用匹配方法获得纸箱位姿

部署Mech-Vision工程
步骤详解
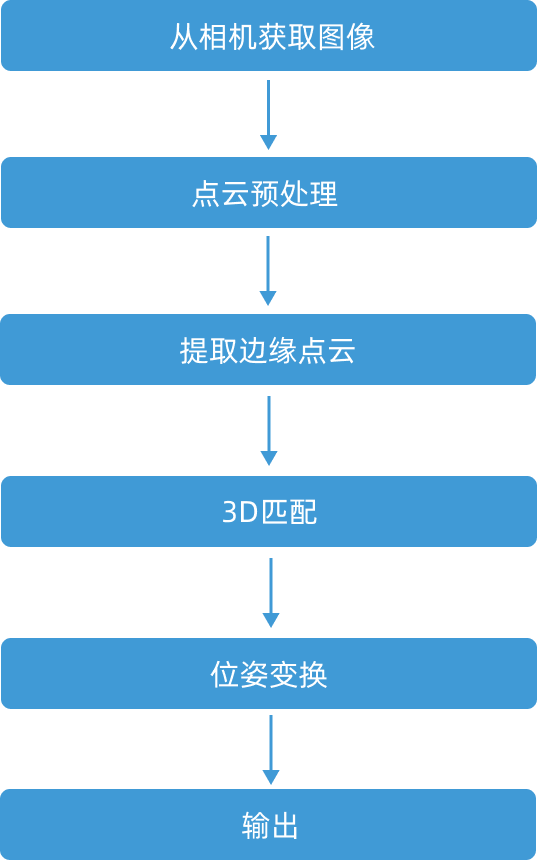
提取边缘点云
-
功能说明:该步骤组合可通过 2D 特征获取边缘点云。
-
需调节的参数:低阈值(1255)、高阈值(1255)
-
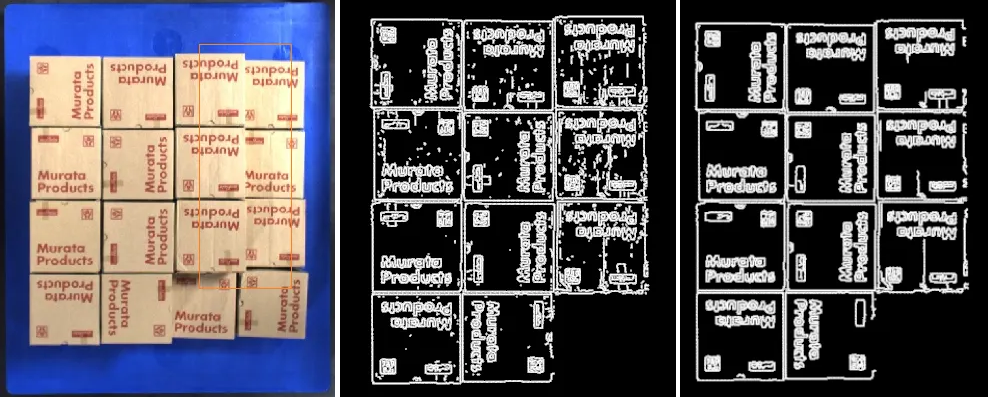
参数解释:如果像素梯度值小于低阈值,则被认为是非边缘。如下图所示,左图为原始图像,中图为低阈值为 150、高阈值为 200 时的边缘提取效果,右图为低阈值为 50、高阈值为 200 时的边缘提取效果。
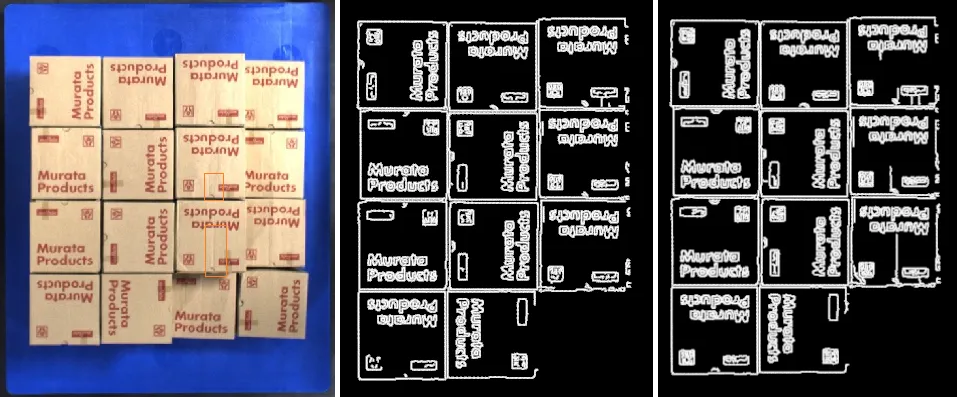
如果像素梯度值大于高阈值,则被认为是强边缘。如下图所示,左图为原始图像,中图为高阈值为 60、低阈值为 50 时的边缘提取效果,右图为高阈值为 200、低阈值为 50 时的边缘提取效果。
-
调节说明:通过查看输出的图像中纸箱边缘是否清晰来调整高阈值,根据是否想保留更多的纸箱表面信息来调整低阈值。
-
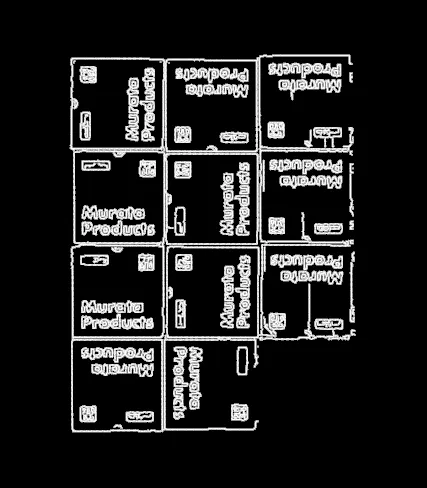
调节示例:参数设置完成后,边缘提取效果如下图所示。
-
3D 匹配
-
功能说明:该步骤组合可通过将点云模板和场景点云进行精确匹配,以获得准确的物体位姿。
-
需调节的参数:模型选择
-
参数解释:该参数用于切换点云模板。
-
调节说明:添加保存结果到文件步骤并将其连接至提取边缘点云步骤组合后,设置文件保存路径后运行该步骤,即可保存提取好的边缘点云。然后在匹配模板与抓取点编辑器内导入保存好的边缘点云,对边缘点云进行编辑、添加抓取点,并对点云模板和抓取点进行保存。最后即可在模型选择参数处选择保存好的点云模板。
-
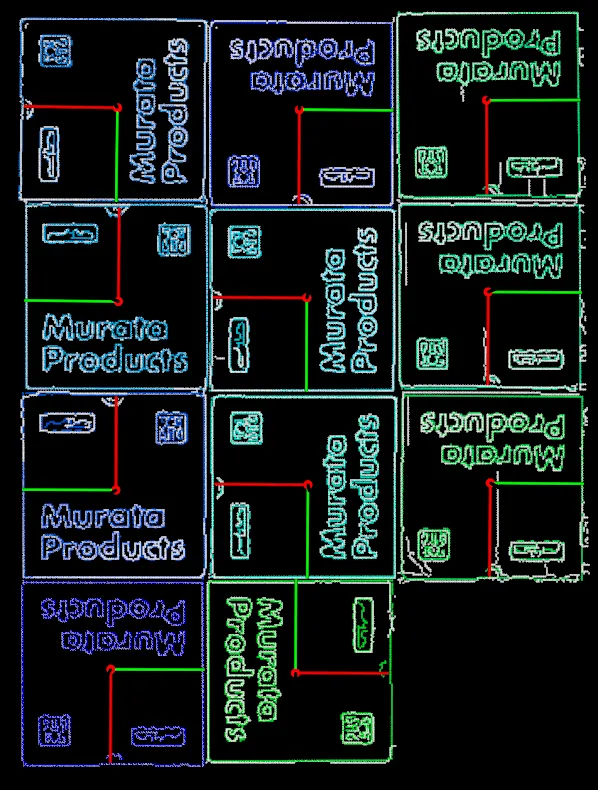
调节示例:制作完成后的点云模板如下图所示。
-