风险评估及应对策略
在方案部署过程中,将会存在若干风险,本节将对可能遇到的风险进行评估,并提供对应的应对策略。


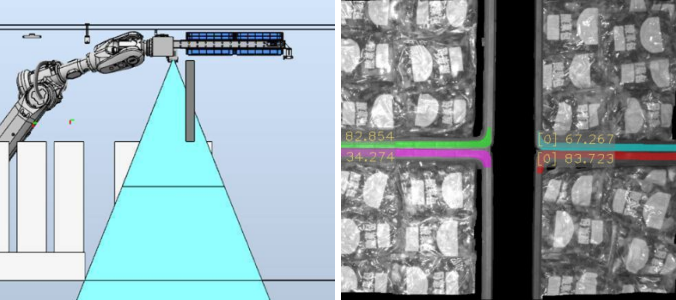
环境光照情况复杂
-
风险:现场环境光照情况复杂多变,易造成周转箱表面过亮、过暗,在一定程度上会导致视觉识别异常。
-
厂房内存在阳光或环境光线干扰,导致周转箱表面过亮。
-
墙柱遮挡光线,造成周转箱表面出现阴影,导致周转箱表面过暗。
-
日间、夜间光照变化明显,导致周转箱表面过亮或过暗。
-
应对策略:根据实际的机器人工位情况进行补光、遮光,具体内容可参考遮光方案。
相机支架滑轨定位精度角度
-
风险:相机支架上装有滑动装置时,由于滑轨定位精度低,导致机器人抓取不准确。
-
应对策略:建议采用钢架结构的相机支架,在需要加装滑动装置时,须使用滑轨定位精度小于 0.1 mm 的伺服电机。