方案基本信息
本节介绍周转箱拆垛方案的基本信息,包括适用范围、不支持的功能、技术指标。
适用范围
本节将从周转箱类型、项目需求、周转箱内物料状态等方面介绍周转箱拆垛方案的适用范围。


周转箱内物料状态
该方案对周转箱内物料状态的适用范围如下表所示。
| 适用范围 | 图示 | 不适用范围 | 图示 |
|---|---|---|---|
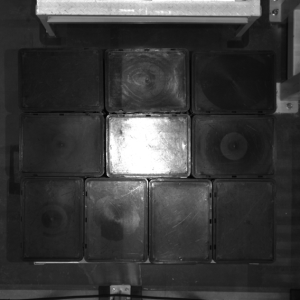
周转箱内物料高度不允许超出周转箱上边缘,相机需采集到较完整的周转箱边缘特征。 |
|
周转箱内物料超出周转箱上边缘,遮挡周转箱边缘特征。 |
|
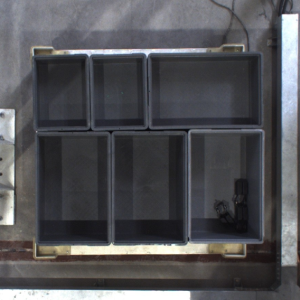
周转箱内物料与周转箱上边缘存在明显间隙。 |
|
周转箱内物料存在隔板,且隔板与周转箱上边缘齐平。 |
|





周转箱抓取顺序
该方案对周转箱抓取顺序的适用范围如下表所示。
| 适用范围 | 图示 | 不适用范围 | 图示 |
|---|---|---|---|
|
根据垛型、夹具抓取方式自定义顺序抓取。 |
|
识别周转箱朝向
该方案对周转箱抓取顺序的适用范围如下表所示。
| 适用范围 | 图示 | 存在风险 | 图示 |
|---|---|---|---|
识别周转箱长短边,并将周转箱按客户需求(沿输送方向放置长边或短边)放置到传送带上。 |
|
指定周转箱的某一条边位于传送方向前端。 |
|


周转箱偏置抓取
该方案对周转箱偏置抓取的适用范围如下表所示。
| 适用范围 | 图示 | 需谨慎评估 | 图示 |
|---|---|---|---|
夹具为邻边抱夹式或单边固定式时,单次抓取一个周转箱。 |
|
夹具需要兼容多种类型的周转箱,同时还需一次抓取多个周转箱。 |