Mech-Eye SDK 2.4.0更新说明
本文介绍Mech-Eye SDK 2.4.0版本的新增功能、功能优化以及问题修复。
Mech-Eye Viewer
NANO ULTRA和Welding:提升数据采集速度
将NANO ULTRA和Welding相机固件版本升级至2.4.0后, 使用不同编码模式采集数据时,深度数据的总采集时间均将缩短:
-
快速:缩短约100ms。
-
精确:缩短约150ms。
-
反光物体:缩短约500ms。
NANO ULTRA、PRO S、PRO M和Welding:更改2D图和深度图分辨率
将NANO ULTRA、PRO S、PRO M和Welding相机固件版本升级至2.4.0后,
可使用相机管理器修改2D图和深度图的分辨率。选择较低分辨率可有效提升相机的采集速度,更好地应对高节拍场景,同时也可降低点云数据的大小。
| 该功能在管理员用户下可见。 |
提供更完善的日志和故障排查指导
Mech-Eye SDK 2.4.0优化了日志界面,同时增加了Mech-Eye Viewer的软件日志,保留更加完善的操作记录,并为报错提供相应的故障排查指导,便于定位问题的原因和解决问题。
全新的自定义坐标系工具
通过全新的自定义坐标系工具,可更灵活地设置自定义坐标系,适用于更多场景。同时,可保存自定义坐标系下的点云数据,降低后续的数据处理负担。
2D补光曝光模式可选择采集模式
|
以下型号提供该更新: DEEP、LSR S、LSR L、NANO、NANO ULTRA、PRO XS、PRO S、PRO M和Welding。 |
将上述型号相机的固件版本升级至2.4.0后,2D参数分组下的曝光模式/2D图(深度源)曝光模式参数设置为补光(原Flash选项)时,新增补光采集模式参数。通过该参数,可以选择不同的采集模式,更好适应不同的场景。其中,快速模式可提升采集速度并优化节拍,实时模式下可调节补光曝光时间参数,获取更高质量的2D图。
| 更多2D补光曝光模式的说明,请参考2D补光曝光模式。 |
查看数据传输时间
连接相机后,在右侧的采集信息标签页中,可查看2D图和深度数据的传输时间,便于确认网络状态是否良好。
停止支持部分型号相机
Mech-Eye SDK 2.4.0停止支持部分已停产型号的相机。这些型号无法将固件升级至2.4.0或以上版本,但仍可使用2.3.4及以下版本的固件及Mech-Eye SDK。
以下型号在Mech-Eye SDK 2.4.0中停止支持:
| 型号 | 特征 |
|---|---|
Deep(V1) |
工作电压为12V,网口为RJ45。 |
Pro L(V1) |
|
Pro L Enhanced(V1) |
|
Pro Max(V1) |
问题修复
Mech-Eye SDK 2.4.0修复了以下问题:
-
UHP-140:可见级别为大师的拍摄模式参数在可见级别设置为初级时即可见。
-
偶发:2D图采集时间明显变长,超出正常范围。
-
偶发:相机长时间连续运行时会自动断开连接并重启。
-
数据采集过程中因网络问题导致相机断开连接时,关闭提示弹窗后Mech-Eye Viewer长时间无响应。
-
将相机的IP地址修改为和电脑上与其相连的网口相同时,Mech-Eye Viewer未提示IP地址冲突并禁止该修改。
-
电脑网卡设置了多个在不同网段的IP地址时,Mech-Eye Viewer的IP配置窗口中电脑IP配置区显示该网卡的第一个IP地址,但连接相机时使用的是最后一个IP地址。
-
内参工具中,检查内参时特征检测结果的内容和标题不对应。
-
在同一个电脑上的多个Mech-Eye Viewer窗口中分别加载了多个不同的虚拟设备时,调节其中一个虚拟设备的参数,其他虚拟设备会提示同步参数设置。
-
查看并配置2D相机工具中,较长的设备版本不能完整显示。
-
偶发:采集信息栏和日志中记录的采集时间为负数。
Mech-Eye API
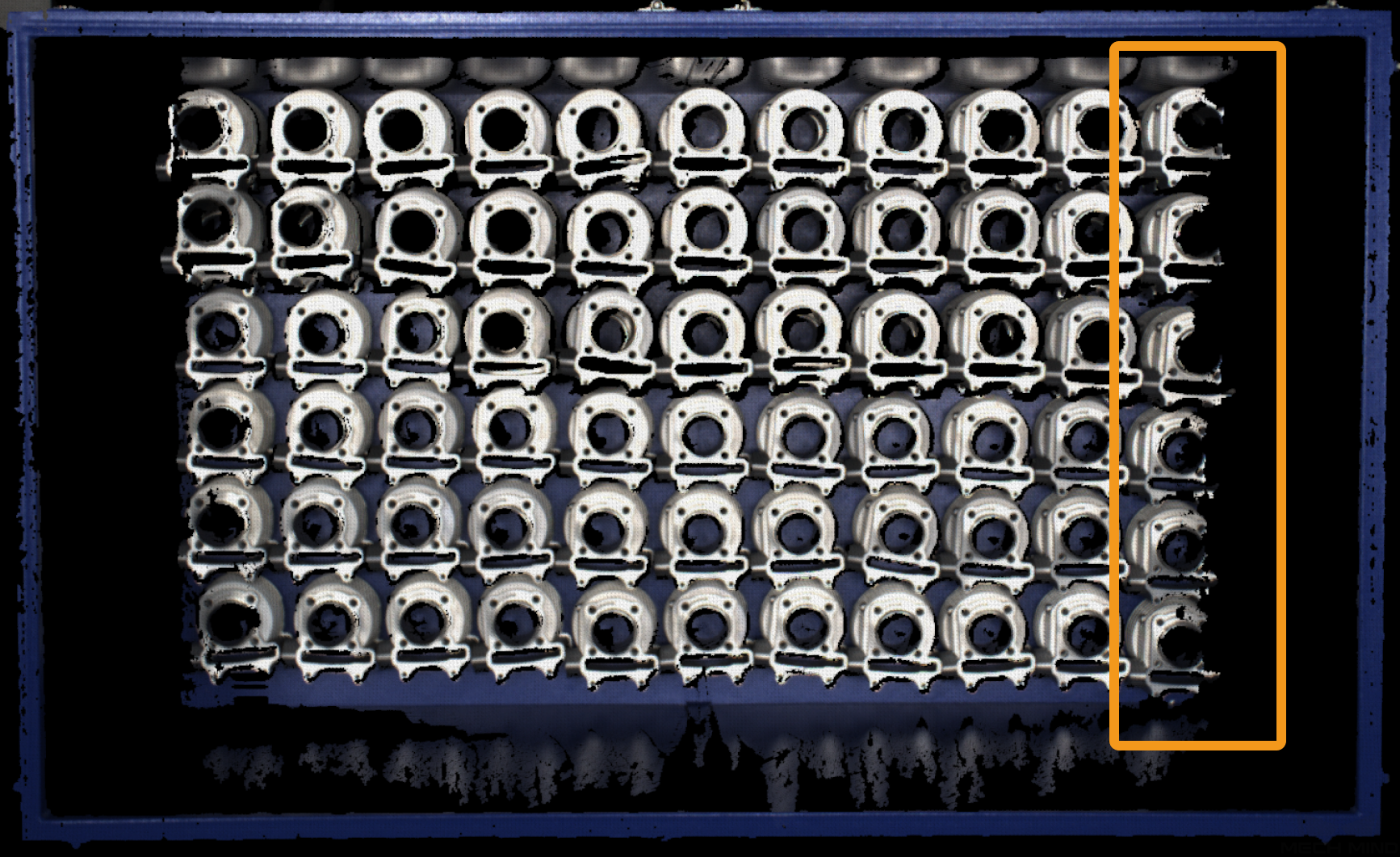
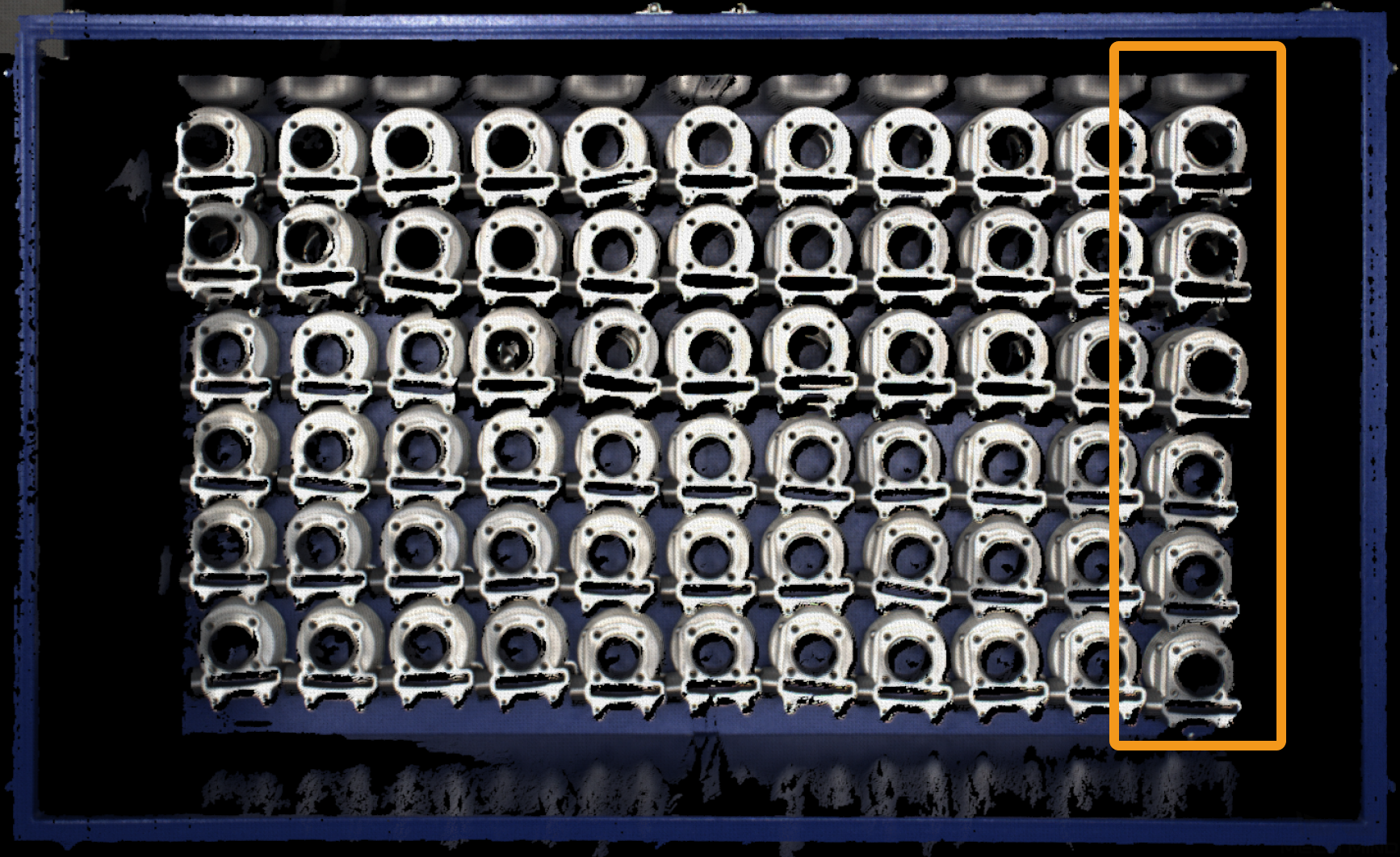
LSR L、LSR XL、LSR S和DEEP:提升Reflective编码模式 + MoreComplete处理模式的效果
将LSR L、LSR XL、LSR S和DEEP相机固件版本升级至2.4.0后,使用LaserFringeCodingMode(编码模式)参数的Reflective选项和LaserProcessingMode(处理模式)参数的MoreComplete选项采集数据时,因料筐侧壁反射导致的深度数据缺失问题将得到改善:
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA和Welding:提升数据采集速度
将NANO ULTRA和Welding相机固件版本升级至2.4.0后, 使用不同编码模式采集数据时,深度数据的总采集时间均将缩短:
-
快速:缩短约100ms。
-
精确:缩短约150ms。
-
反光物体:缩短约500ms。
通过相机事件提升节拍
通过注册相机事件回调函数,客户端程序可自动检测相机是否已结束投射结构光和采集3D数据。投光和采集结束后,机器人即可开始移动,相机在机器人移动的同时完成后续计算和数据传输,提升节拍。
相机事件回调函数的注册和注销方法,请参考相关例程RegisterCameraEvent(C++、C#)/register_camera_event(Python)。
自定义坐标系
使用Mech-Eye Viewer的自定义坐标系工具设置自定义坐标系后,可调用新增方法,获取自定义坐标系相对于相机坐标系的变换参数以及自定义坐标系下的点云。
具体使用方法,请参考相关例程TransformPointCloud(C++、C#)/transform_point_cloud(Python)。
2D Flash曝光模式可选择采集模式
|
以下型号提供该更新: DEEP、LSR S、LSR L、NANO、NANO ULTRA、PRO XS、PRO S、PRO M和Welding。 |
将上述型号相机的固件版本升级至2.4.0后,Scan2DExposureMode(曝光模式)/Scan2DPatternRoleExposureMode(2D图(深度源)曝光模式)参数设置为Flash时,新增Scan2DFlashAcquisitionMode(补光采集模式)参数。通过该参数,可以选择不同的采集模式,更好适应不同的场景。其中,Fast模式可提升采集速度并优化节拍,Responsive模式下可调节Scan2DFlashExposureTime(补光曝光时间)参数,获取更高质量的2D图。
| 更多2D补光曝光模式的说明,请参考2D补光曝光模式。 |
使用jet配色方案渲染深度图
Mech-Eye API 2.4.0提供新例程RenderDepthMap(C++、C#)/render_depth_map(Python),该例程展示了如何使用jet配色方案渲染深度图,使不同深度值显示为jet配色方案中的不同颜色。
提供ROS接口
Mech-Eye SDK重新提供ROS接口,可通过ROS实现机器人和相机之间的通信。
ROS接口可通过GitHub获取:
|
GenICam接口
LSR L、LSR XL、LSR S和DEEP:提升Reflective编码模式 + MoreComplete处理模式的效果
将LSR L、LSR XL、LSR S和DEEP相机固件版本升级至2.4.0后,使用LaserFringeCodingMode(编码模式)参数的Reflective选项和LaserProcessingMode(处理模式)参数的MoreComplete选项采集数据时,因料筐侧壁反射导致的深度数据缺失问题将得到改善:
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA和Welding:提升数据采集速度
将NANO ULTRA和Welding相机固件版本升级至2.4.0后, 使用不同编码模式采集数据时,深度数据的总采集时间均将缩短:
-
快速:缩短约100ms。
-
精确:缩短约150ms。
-
反光物体:缩短约500ms。
2D Flash曝光模式可选择采集模式
|
以下型号提供该更新: DEEP、LSR S、LSR L、NANO、NANO ULTRA、PRO XS、PRO S、PRO M和Welding。 |
将上述型号相机的固件版本升级至2.4.0后,Scan2DExposureMode(曝光模式)/Scan2DPatternRoleExposureMode(2D图(深度源)曝光模式)参数设置为Flash时,新增Scan2DFlashAcquisitionMode(补光采集模式)参数。通过该参数,可以选择不同的采集模式,更好适应不同的场景。其中,Fast模式可提升采集速度并优化节拍,Responsive模式下可调节Scan2DFlashExposureTime(补光曝光时间)参数,获取更高质量的2D图。
| 更多2D补光曝光模式的说明,请参考2D补光曝光模式。 |