Mech-Eye SDK 2.3.4更新说明
本文介绍Mech-Eye SDK 2.3.4版本的新增功能、功能优化以及问题修复。
Mech-Eye Viewer
DEEP、LSR S和LSR L:反光物体编码模式新增选项,深度数据更完整
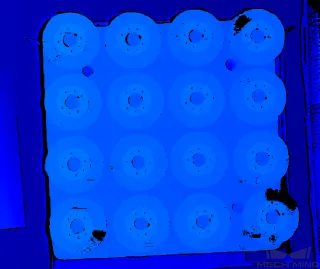
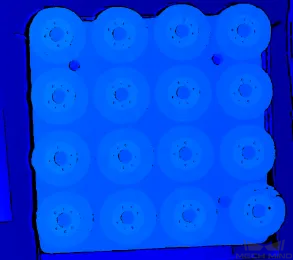
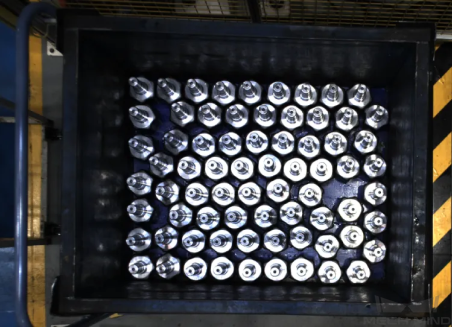
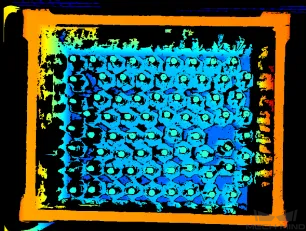
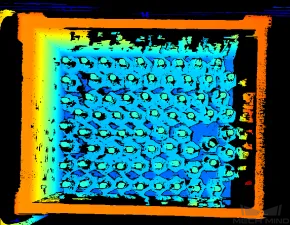
将DEEP、LSR S和LSR L相机固件升级至2.3.4版本后,使用编码模式参数的反光物体选项时,新增处理模式参数,用于选择不同的数据处理模式。其中,更快选项与2.3.3版本效果和速度相同,更完整选项能够提供更优的深度数据,使得深度图和点云更完整。对于反光条件复杂的场景,如筐壁易产生多重反射的料筐,推荐使用更完整选项,以保障数据质量。
| 更完整选项处理速度较慢。其他条件相同时,更完整选项比更快选项慢约1秒。 |
| 目标物体 | 更快选项 | 更完整选项 |
|---|---|---|
|
|
|
|
|
|

问题修复
Mech-Eye SDK 2.3.4修复了以下问题:
-
相机温度高时,相机断开连接并重启。此时,日志中显示错误码为0x0315的报错。
-
NANO ULTRA:3D参数分组下的曝光时间参数值较小时,深度图和点云中出现条纹状或椭圆形的深度波动。
-
Deep、Laser L、Log S、Log M、Pro S Enhanced、Pro M Enhanced和Pro L Enhanced:将相机固件版本升级至2.3.2或2.3.3后,相机无法被搜索到。此时,日志中显示错误码为0x0107的报错。
-
在内参工具中矫正内参后,如不关闭结果弹窗直接关闭Mech-Eye Viewer,结果弹窗不会随软件关闭。
Mech-Eye API
DEEP、LSR S和LSR L:Reflective编码模式新增选项,深度数据更完整
将DEEP、LSR S和LSR L相机固件升级至2.3.4版本后,使用LaserFringeCodingMode(编码模式)参数的Reflective选项时,新增ProcessingMode(处理模式)参数,用于选择不同的数据处理模式。其中,Faster选项与2.3.3版本效果和速度相同,MoreComplete选项能够提供更优的深度数据,使得深度图和点云更完整。对于反光条件复杂的场景,如筐壁易产生多重反射的料筐,推荐使用MoreComplete选项,以保障数据质量。
| MoreComplete选项处理速度较慢。其他条件相同时,MoreComplete选项比Faster选项慢约1秒。 |
| 目标物体 | Faster选项 | MoreComplete选项 |
|---|---|---|
|
|
|
|
|
|
IP配置工具:新增无交互的命令模式
IP配置工具新增无交互的命令模式,可通过执行指令直接完成相应的IP配置更改操作,满足更多样的需求,例如基于该工具自行开发IP配置的图形化界面。
设置点云中点坐标的单位
调用以下新增方法,可获取和设置点云点坐标的单位。
| 设置点云点坐标单位的方法需在采集数据前调用。 |
-
C++
-
C#
-
Python
ErrorStatus getPointCloudUnit(CoordinateUnit& unit) const;
ErrorStatus setPointCloudUnit(CoordinateUnit unit);ErrorStatus GetPointCloudUnit(ref CoordinateUnit unit);
ErrorStatus SetPointCloudUnit(CoordinateUnit unit);err, unit = self.camera.get_point_cloud_unit()
self.camera.set_point_cloud_unit(Unit)问题修复
Mech-Eye SDK 2.3.4修复了以下问题:
-
相机温度高时,相机断开连接并重启。此时,日志中显示错误码为0x0315的报错。
-
NANO ULTRA:3D参数分组下的曝光时间参数值较小时,深度图和点云中出现条纹状或椭圆形的深度波动。
-
Deep、Laser L、Log S、Log M、Pro S Enhanced、Pro M Enhanced和Pro L Enhanced:将相机固件版本升级至2.3.2或2.3.3后,相机无法被搜索到。此时,日志中显示错误码为0x0107的报错。
-
Nano、NANO和PRO XS:调用
getUntexturedPointCloudWithNormals()和getTexturedPointCloudWithNormals()方法时,获取的点云中出现坐标为 (0,0,0) 的点。 -
Python:调用
get_textured_point_cloud_with_normals()方法无法获取法向量的X分量数据。
GenICam接口
DEEP、LSR S和LSR L:Reflective编码模式新增选项,深度数据更完整
将DEEP、LSR S和LSR L相机固件升级至2.3.4版本后,使用LaserFringeCodingMode(编码模式)参数的Reflective选项时,新增ProcessingMode(处理模式)参数,用于选择不同的数据处理模式。其中,Faster选项与2.3.3版本效果和速度相同,MoreComplete选项能够提供更优的深度数据,使得深度图和点云更完整。对于反光条件复杂的场景,如筐壁易产生多重反射的料筐,推荐使用MoreComplete选项,以保障数据质量。
| MoreComplete选项处理速度较慢。其他条件相同时,MoreComplete选项比Faster选项慢约1秒。 |
| 目标物体 | Faster选项 | MoreComplete选项 |
|---|---|---|
|
|
|
|
|
|
IP配置工具:新增无交互的命令模式
IP配置工具新增无交互的命令模式,可通过执行指令直接完成相应的IP配置更改操作,满足更多样的需求,例如基于该工具自行开发IP配置的图形化界面。