Mech-Eye SDK 2.2.1更新说明
本文介绍Mech-Eye SDK 2.2.1版本的新增功能、功能优化以及问题修复。
Mech-Eye Viewer
新增功能
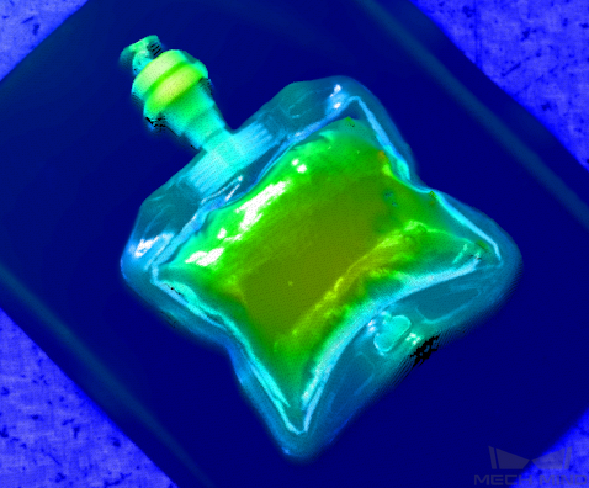
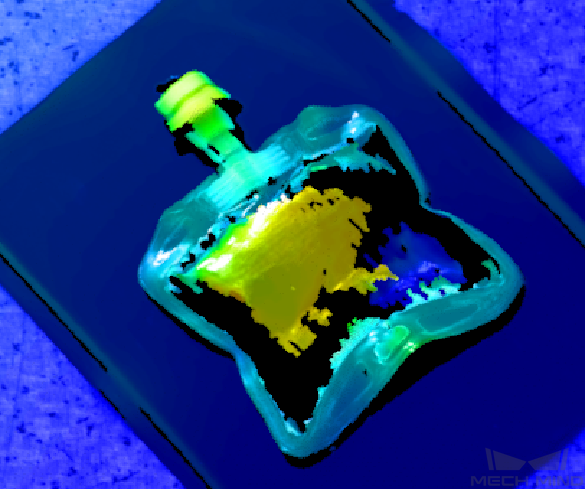
提升透明物体的深度数据质量
将PRO S(V4)和PRO M(V4)相机固件升级至2.2.1版本后,3D参数分组下的编码模式参数新增Translucent选项。目标物体为医用盐水袋等透明物体时,使用该选项可显著提升深度数据的质量。
| 目标物体 | Translucent选项 | 其他选项 |
|---|---|---|
|
|
|
|
|
|

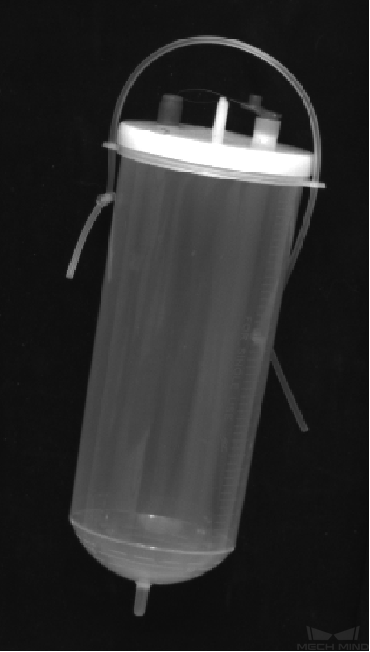


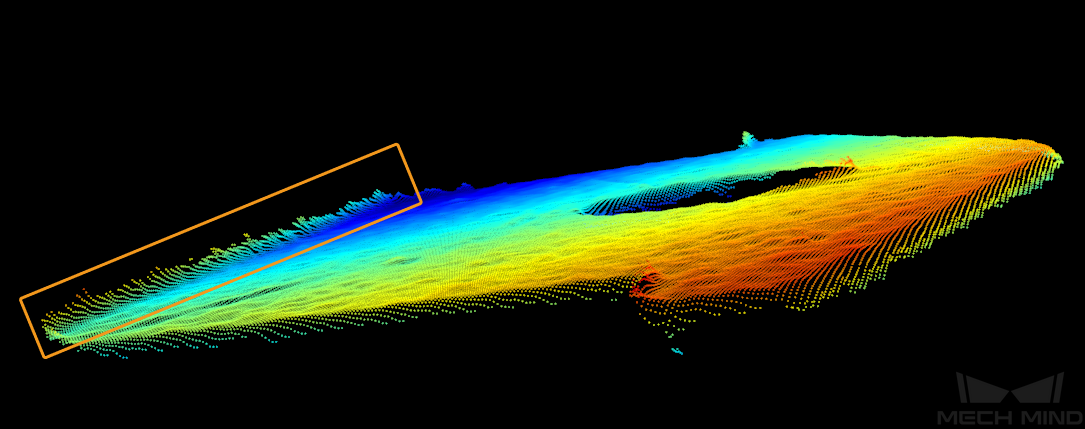
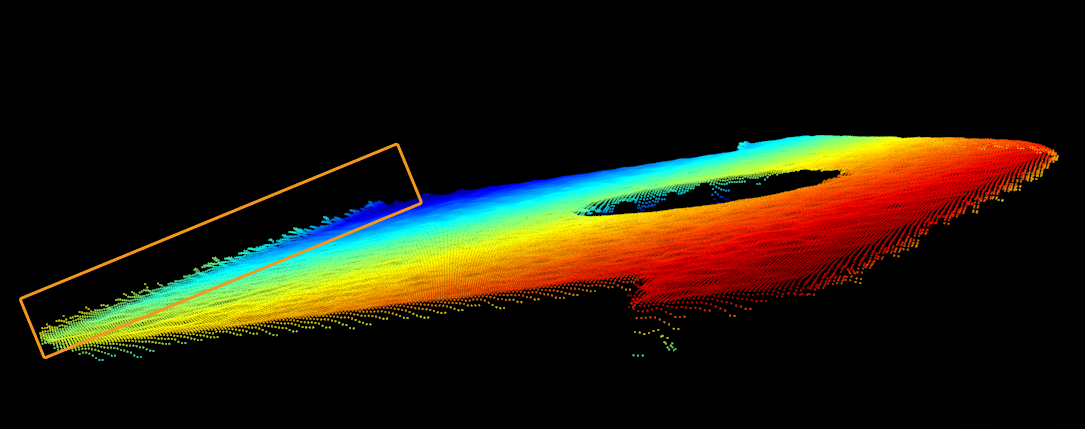
校正深度数据中的失真
将PRO S(V4)、PRO M(V4)和UHP-140(V4)相机固件升级至2.2.1版本后,点云后处理分组下新增失真校正参数。通过调节该参数可校正深度数据中由物体颜色或高度的剧烈变化导致的失真。
| 目标物体 | 不开启失真校正 | 开启失真校正 |
|---|---|---|
|
|
|

新增采集信息的显示
Mech-Eye Viewer 2.2.1新增采集信息标签页,在该标签页中可查看当次数据采集所用时间、采集的图像分辨率、相机CPU和投光单元的温度等信息。
新增深度图网格
Mech-Eye Viewer 2.2.1新增深度图网格,可在深度图上显示2 × 2或3 × 3的网格,便于找到视野中心。
Mech-Eye API
新增功能
获取左右2D相机的2D图
使用Deep(V3)、Laser L Enhanced(V3)、Pro XS(V3)、LSR L(V4)、LSR S(V4)和DEEP(V4)时,调用以下新增方法,可获得左右两张2D图或2D图(深度源)。
-
C++
-
C#
-
Python
mmind::eye::Frame2D stereoLeft, stereoRight;
camera.captureStereo2D(stereoLeft, stereoRight, false);Frame2D left = new Frame2D();
Frame2D right = new Frame2D();
camera.captureStereo2D(ref left, ref right)stereo_left = Frame2D()
stereo_right = Frame2D()
self.camera.capture_stereo_2d(stereo_left, stereo_right)提升透明物体的深度数据质量
将PRO S(V4)和PRO M(V4)相机固件升级至2.2.1版本后,3D参数分组下的编码模式参数新增Translucent选项。目标物体为医用盐水袋等透明物体时,使用该选项可显著提升深度数据的质量。
| 目标物体 | Translucent选项 | 其他选项 |
|---|---|---|
|
|
|
|
|
|
校正深度数据中的失真
将PRO S(V4)、PRO M(V4)和UHP-140(V4)相机固件升级至2.2.1版本后,点云后处理分组下新增失真校正参数。通过调节该参数可校正深度数据中由物体颜色或高度的剧烈变化导致的失真。
| 目标物体 | 不开启失真校正 | 开启失真校正 |
|---|---|---|
|
|
|