Mech-Eye SDK 2.3.3更新说明
本文介绍Mech-Eye SDK 2.3.3版本的新增功能、功能优化以及问题修复。
Mech-Eye Viewer
支持新型号相机NANO ULTRA
Mech-Eye SDK 2.3.3可连接全新型号的相机NANO ULTRA,控制其采集数据,调节参数等。同时,NANO ULTRA提供反光件焊接预置参数组,适用于焊接反光件或以一定角度焊接两个工件等易反光的场景。
|
|
|
|
|
|


关于NANO ULTRA的各项技术参数,详见NANO ULTRA。
| 如需使用Mech-Vision连接NANO ULTRA,需使用1.8.2或以上版本。 |
PRO S和PRO M:提升反光物体编码模式的速度和效果
将PRO S和PRO M系列相机固件升级至2.3.3版本后,使用编码模式参数的反光物体选项采集数据时,将有以下提升:
-
相比2.3.2版本,采集时间缩短:
-
未设置感兴趣区域时,深度数据的采集时间缩短约20%。
-
设置感兴趣区域可进一步缩短深度数据的采集时间。
设置面积为原图像1/2的感兴趣区域时,深度数据的采集时间缩短约32%;设置面积为原图像1/4的感兴趣区域时,深度数据的采集时间缩短约40%。
-
-
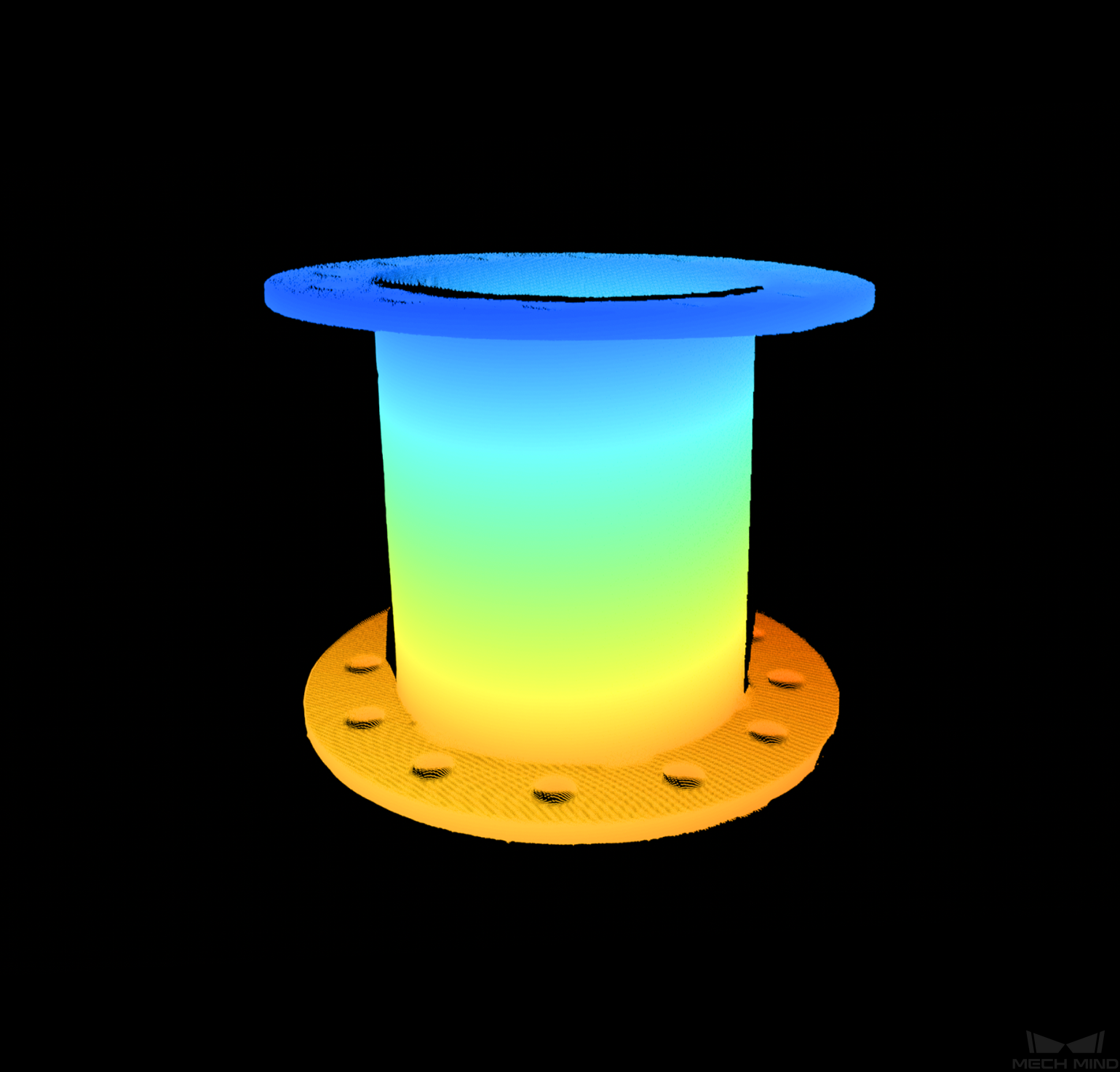
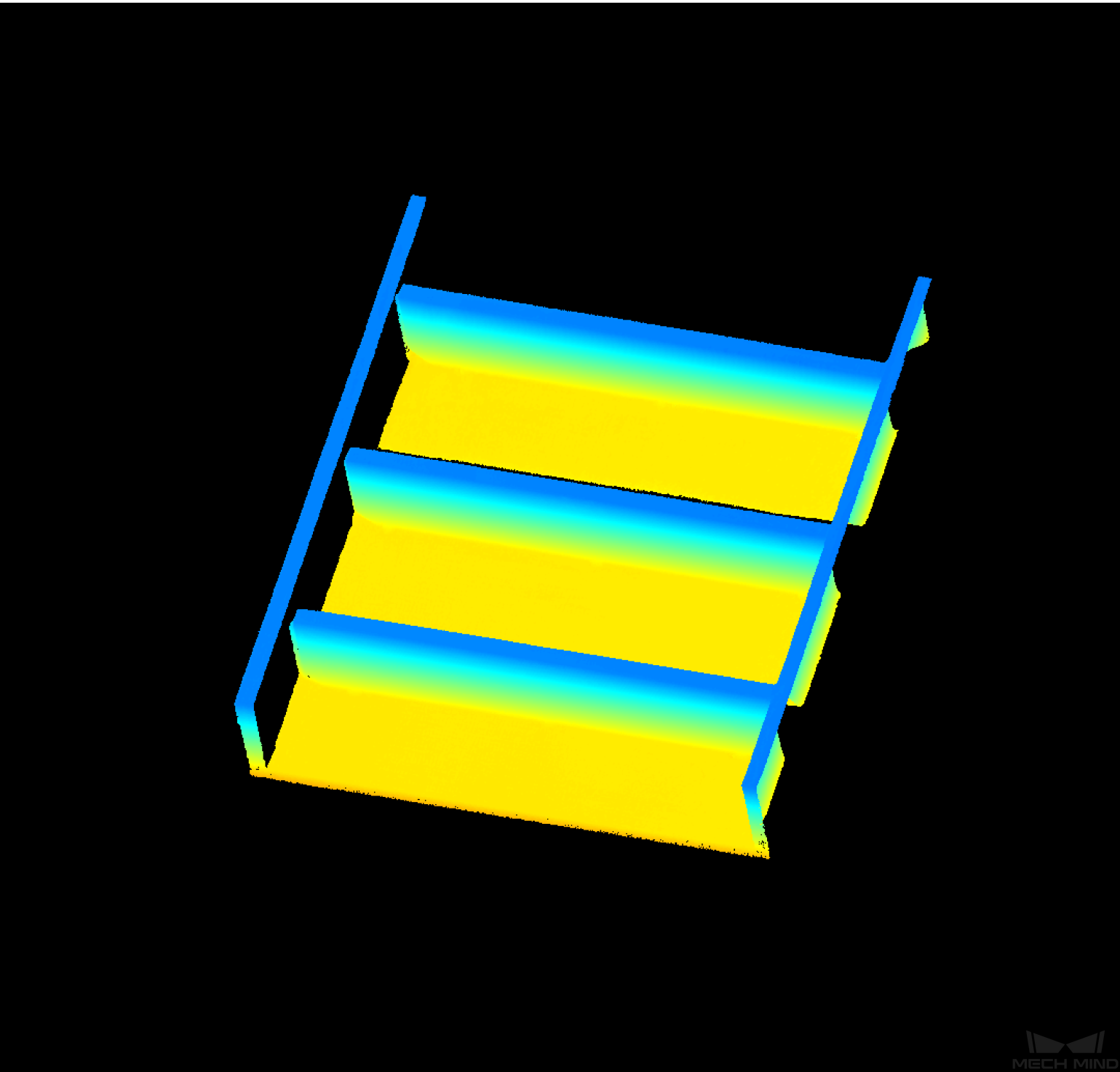
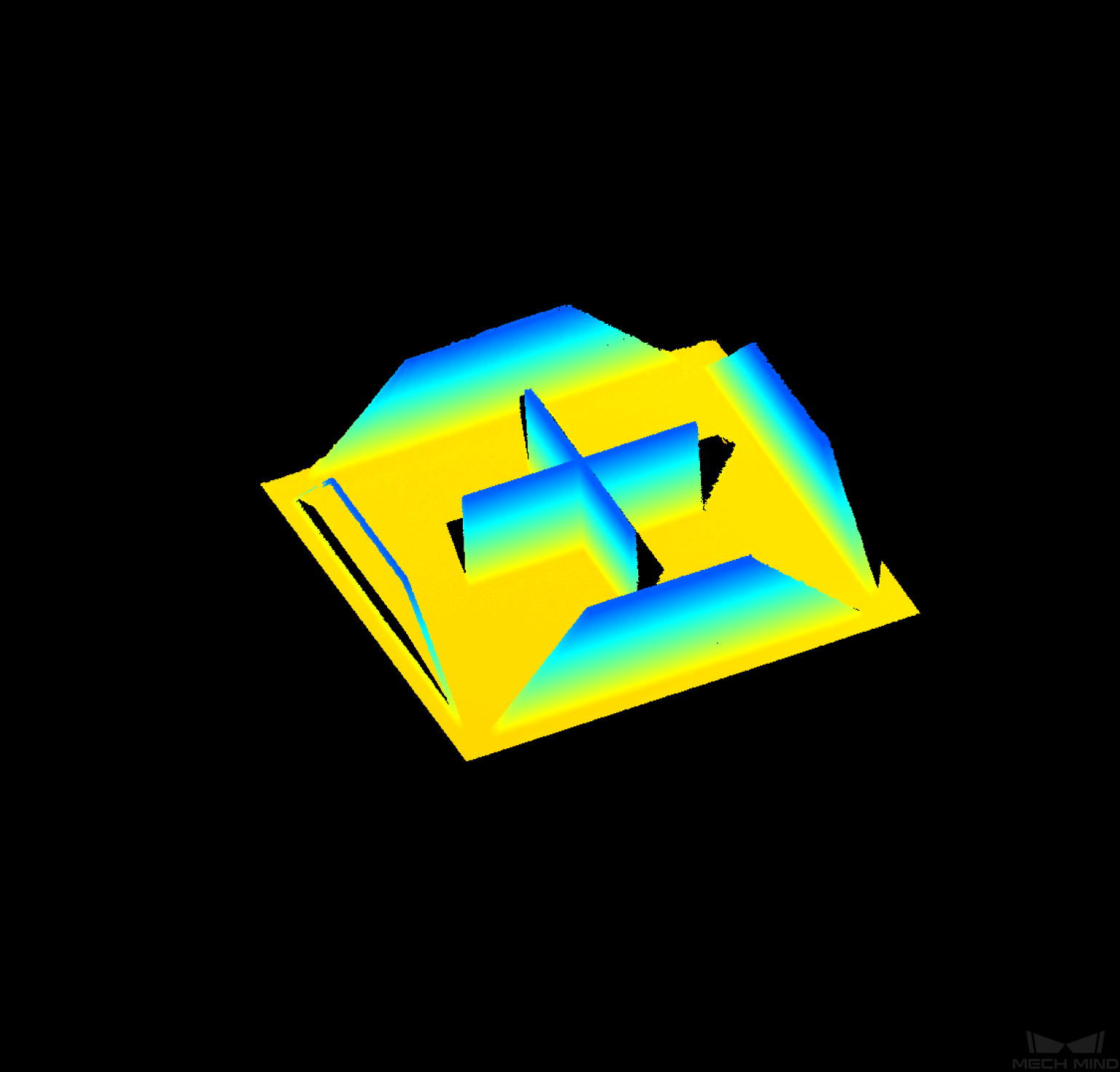
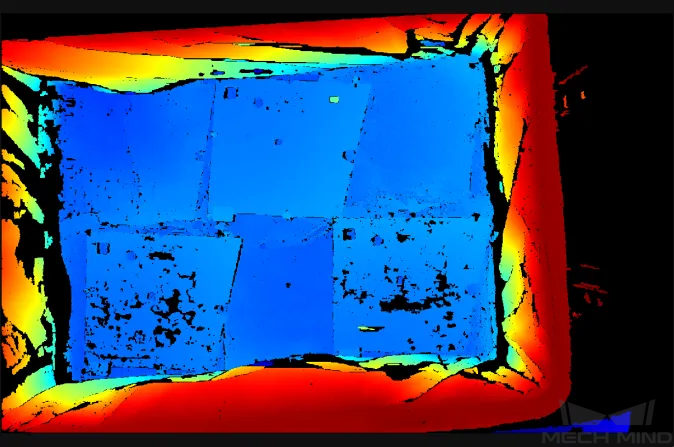
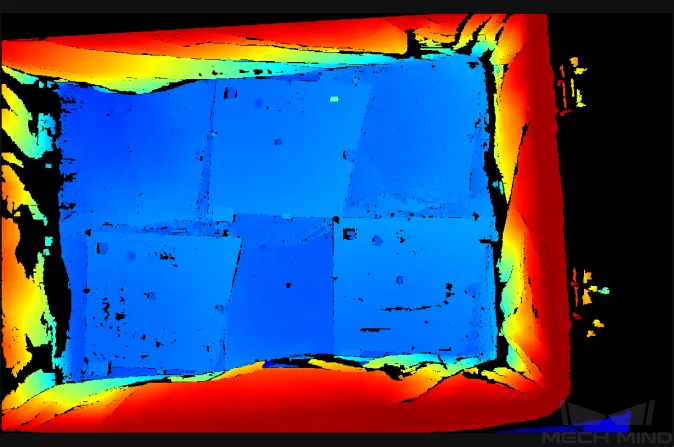
以下常见的深度数据质量问题得到改善:
常见问题 物体 2.3.2 2.3.3 多重反射导致的缺失、深度数据错误

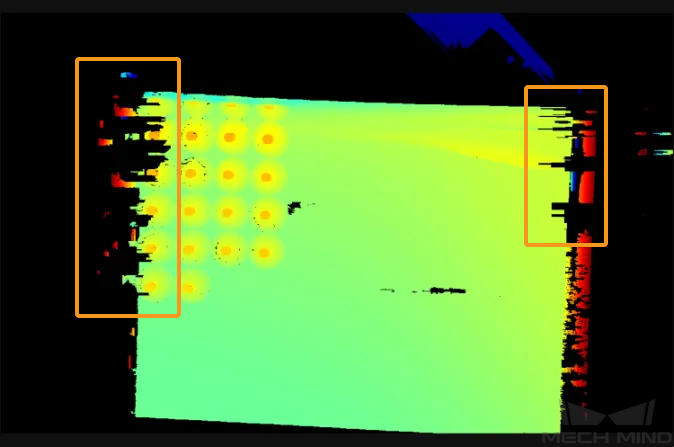
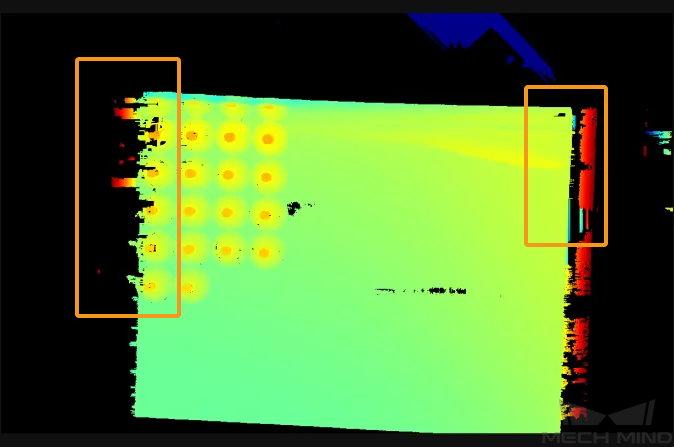

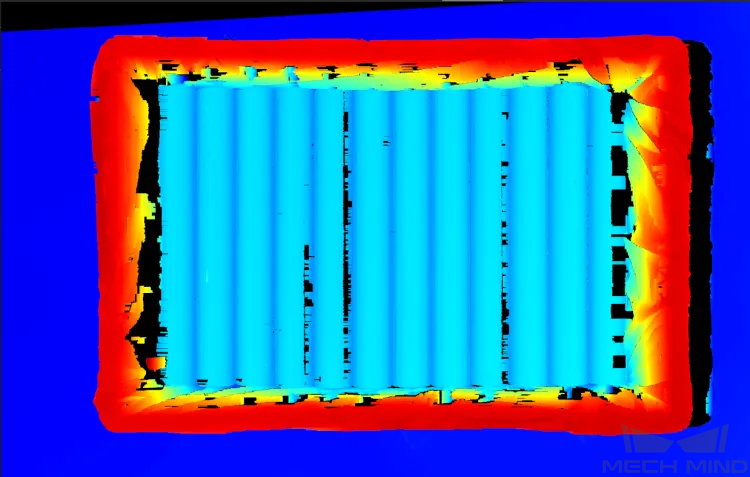
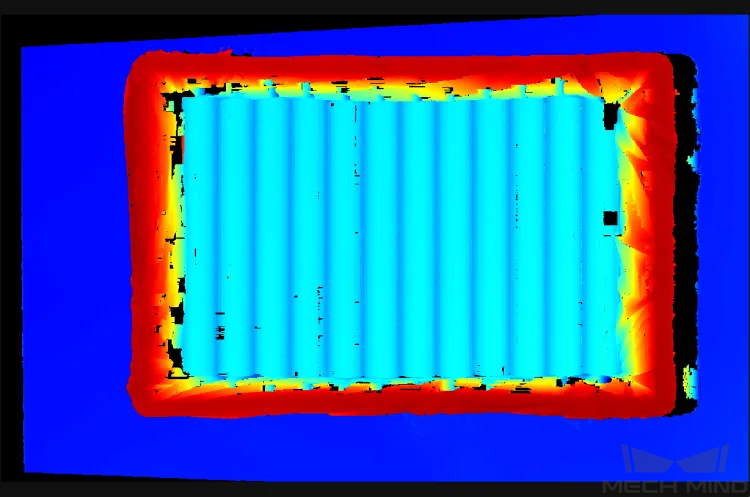
悬空物体的深度数据错误


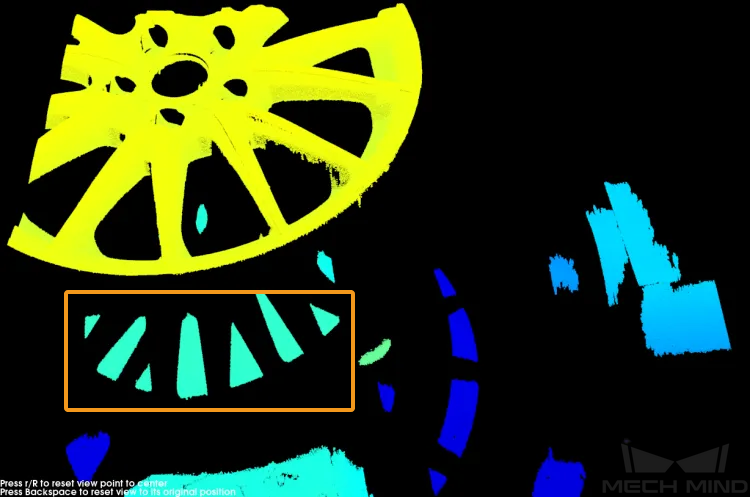
眩光导致的数据缺失

另外,条纹对比度阈值参数现可在使用反光物体选项时调节。
Mech-Eye API
支持新型号相机NANO ULTRA
Mech-Eye SDK 2.3.3可连接全新型号的相机NANO ULTRA,控制其采集数据,调节参数等。同时,NANO ULTRA提供反光件焊接预置参数组,适用于焊接反光件或以一定角度焊接两个工件等易反光的场景。
|
|
|
|
|
|
关于NANO ULTRA的各项技术参数,详见NANO ULTRA。
| 如需使用Mech-Vision连接NANO ULTRA,需使用1.8.2或以上版本。 |
PRO S和PRO M:提升Reflective编码模式的速度和效果
将PRO S和PRO M系列相机固件升级至2.3.3版本后,使用ProjectorFringeCodingMode(编码模式)参数的反光物体选项采集数据时,将有以下提升:
-
相比2.3.2版本,采集时间缩短:
-
未设置ROI时,深度数据的采集时间缩短约20%。
-
设置ROI可进一步缩短深度数据的采集时间。设置面积为原图像1/2的ROI时,深度数据的采集时间缩短约32%;设置面积为原图像1/4的ROI时,深度数据的采集时间缩短约40%。
-
-
以下常见的深度数据质量问题得到改善:
常见问题 物体 2.3.2 2.3.3 多重反射导致的缺失、深度数据错误
悬空物体的深度数据错误
眩光导致的数据缺失
另外,FringeContrastThreshold(条纹对比度阈值)参数现可在使用反光物体选项时调节。
GenICam接口
支持新型号相机NANO ULTRA
Mech-Eye SDK 2.3.3可连接全新型号的相机NANO ULTRA,控制其采集数据,调节参数等。同时,NANO ULTRA提供反光件焊接预置参数组,适用于焊接反光件或以一定角度焊接两个工件等易反光的场景。
|
|
|
|
|
|
关于NANO ULTRA的各项技术参数,详见NANO ULTRA。
| 如需使用Mech-Vision连接NANO ULTRA,需使用1.8.2或以上版本。 |
PRO S和PRO M:提升Reflective编码模式的速度和效果
将PRO S和PRO M系列相机固件升级至2.3.3版本后,使用ProjectorFringeCodingMode(编码模式)参数的反光物体选项采集数据时,将有以下提升:
-
相比2.3.2版本,采集时间缩短:
-
未设置ROI时,深度数据的采集时间缩短约20%。
-
设置ROI可进一步缩短深度数据的采集时间。设置面积为原图像1/2的ROI时,深度数据的采集时间缩短约32%;设置面积为原图像1/4的ROI时,深度数据的采集时间缩短约40%。
-
-
以下常见的深度数据质量问题得到改善:
常见问题 物体 2.3.2 2.3.3 多重反射导致的缺失、深度数据错误
悬空物体的深度数据错误
眩光导致的数据缺失
另外,FringeContrastThreshold(条纹对比度阈值)参数现可在使用反光物体选项时调节。