DEEP参数
本章介绍DEEP相机的参数。参数按照影响的数据类型拆分为2D图参数及深度图与点云参数。
2D图参数
DEEP提供两种2D图:2D图(纹理)和2D图(深度源)。其使用场景如下:
| 2D图类型 | 使用场景 |
|---|---|
2D图(纹理) |
为点云添加纹理 |
2D图(深度源) |
内参检查 |
设置感兴趣区域 |
|
进行手眼标定 |
2D图应不过亮或过暗,可看清目标物体的表面特征。
2D参数分组下的参数及3D参数分组下的相机增益影响2D图质量。
| 彩色相机采集图像时,如因现场光照条件导致图像颜色与实际差别较大,请调节白平衡。详细操作请参考调节白平衡。 |
2D参数
2D图(纹理)曝光模式
参数说明 |
设置拍摄2D图(纹理)时的曝光模式。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
选择不同选项后,2D参数分组中将显示不同的参数供调节:
|
固定曝光:曝光时间
参数说明 |
影响图像亮度。
|
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
0.1~999ms |
调节说明 |
根据2D图的质量调节。2D图应不过亮或过暗,可看清目标物体的表面特征。
|
其他条件相同,仅曝光时间不同的2D图对比如下:
| 5ms | 90ms | 500ms |
|---|---|---|
|
|
|

自动曝光:灰度值
参数说明 |
影响亮度。减小灰度值降低图片亮度,增加灰度值提高图片亮度。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
0~255 |
调节说明 |
无 |
其他条件相同,仅灰度值不同的2D图对比如下:
| 50 | 100 | 150 |
|---|---|---|
|
|
|



| 黑白图像的灰度值相当于图像亮度;彩色图像的灰度值相当于每个颜色通道的亮度。 |
自动曝光:自动曝光感兴趣区域
参数说明 |
|
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
无 |
调节说明 |
详见下方设置自动曝光感兴趣区域。 |
其他条件相同,仅自动曝光感兴趣区域不同的2D图对比如下:
| 自动曝光感兴趣区域 | 2D图 |
|---|---|
|
|
|
|
|
|





设置自动曝光感兴趣区域
-
双击自动曝光感兴趣区域右侧的编辑,进入设置感兴趣区域页面。
-
在左侧选择并调节感兴趣区域。拖拽选框可调节位置,拖拽白色锚点可调节大小。
-
单击应用,应用设置的自动曝光感兴趣区域。
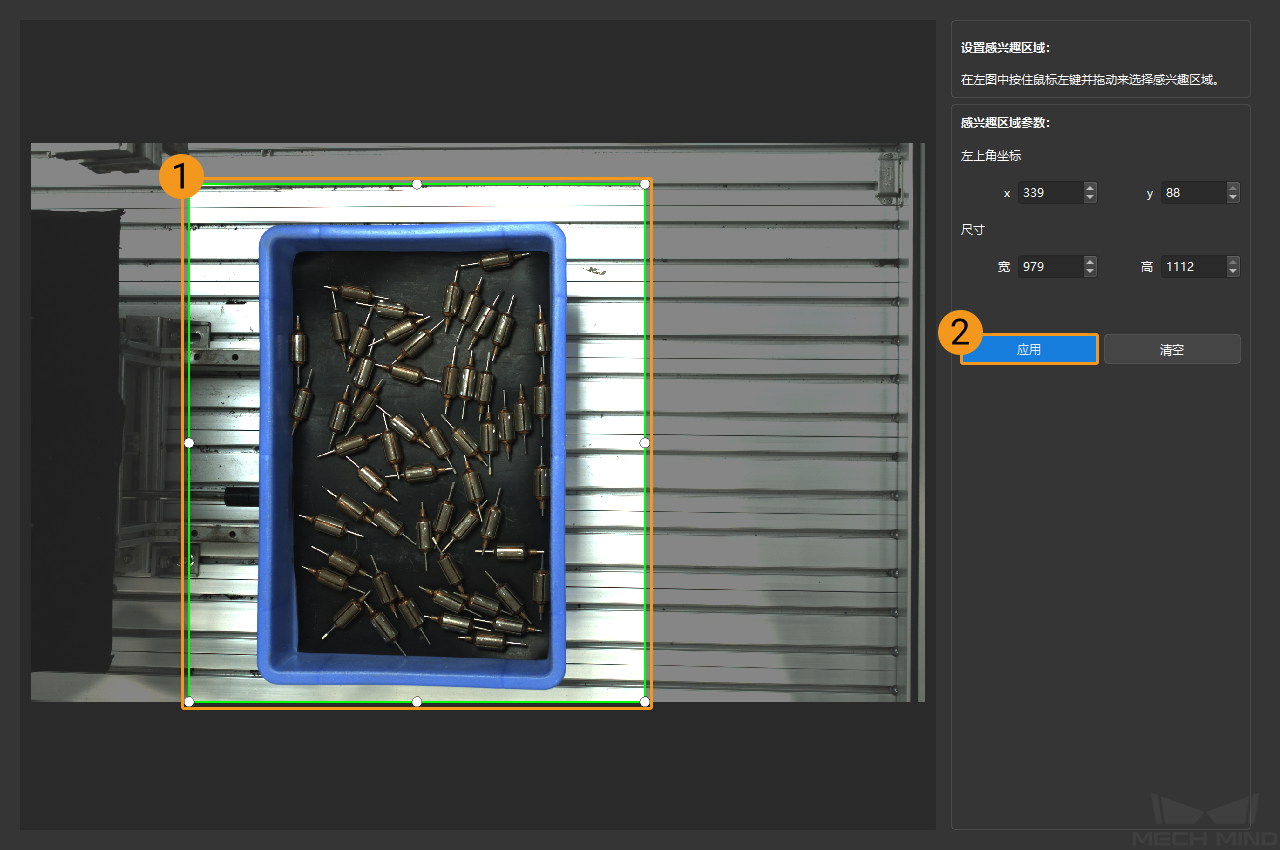
单击清空,可清除当前设置的自动曝光感兴趣区域。 -
重新采集图像并查看2D图,确认自动曝光的效果。
HDR:色调映射
参数说明 |
可使图像看起来更自然。如2D图和真实物体相差较大,可勾选该参数。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
勾选即可开启色调映射。 |
色调映射开启前后的2D图对比如下:
| False | True |
|---|---|
|
|


HDR:曝光时间序列
参数说明 |
设置多个曝光时间,并将所拍摄的图像融合为一张保留更多明暗细节的2D图。 |
||
|---|---|---|---|
可见级别 |
初级、专家、大师 |
||
参数取值 |
无 |
||
调节说明 |
|
设置单个曝光时间时,不同曝光时间的2D图对比如下:
| 500ms | 700ms | 900ms |
|---|---|---|
|
|
|



使用以上曝光时间组合成不同的曝光时间序列时,不同序列的2D图对比如下:
| 700ms | 500ms & 900ms | 500ms & 700ms & 900ms |
|---|---|---|
|
|
|




3D参数
相机增益
参数说明 |
用于增加图像亮度,但可能会引入噪点。
|
||
|---|---|---|---|
可见级别 |
专家、大师 |
||
参数取值 |
0~16dB |
||
调节说明 |
当设置曝光时间无法达到期望亮度时,可以使用该参数。 |
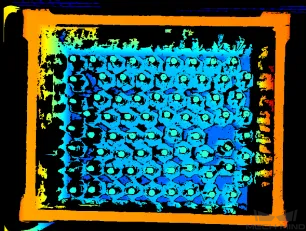
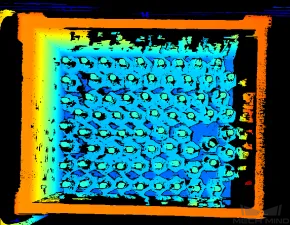
其他条件相同,仅相机增益不同的2D图和深度图对比如下:
| 0 | 5 | 10 |
|---|---|---|
|
|
|
|
|
|


深度图与点云参数
深度图与点云中,所需的数据应完整。
| 根据实际需求判断所需数据的范围。例如,需通过碗沿抓取碗口向上摆放的金属碗时,一般只需确保碗沿部分的数据完整。 |
以下分组中的参数影响深度图与点云质量。
| 参数分组 | 深度图 | 点云 |
|---|---|---|
3D参数 |
|
|
点云后处理 |
|
|
深度范围 |
|
|
感兴趣区域设置 |
|
|
3D参数
该分组下的参数影响用于计算深度数据的图像,从而影响深度图及点云质量。
使用曝光助手可获得推荐的曝光参数组合。双击3D参数右侧的自动设置,即可打开曝光助手。
曝光次数
参数说明 |
设置曝光时间的个数。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
1~3 |
调节说明 |
|
|
3D参数分组下的编码模式设置为反光物体时,曝光次数不可用。 |
曝光时间
参数说明 |
设置采集深度信息时的曝光时间,需设置的曝光时间个数取决于曝光次数的值。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
|
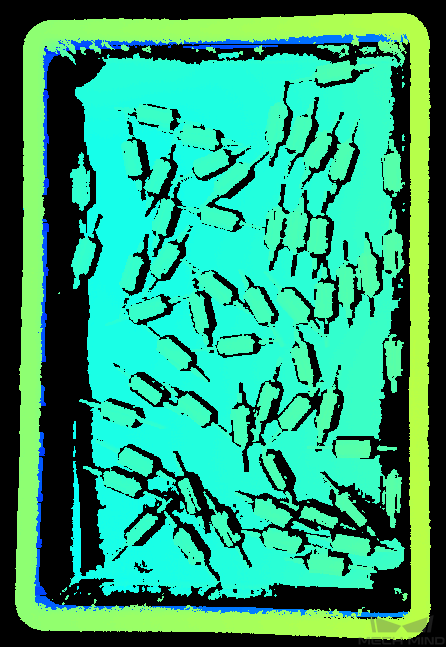
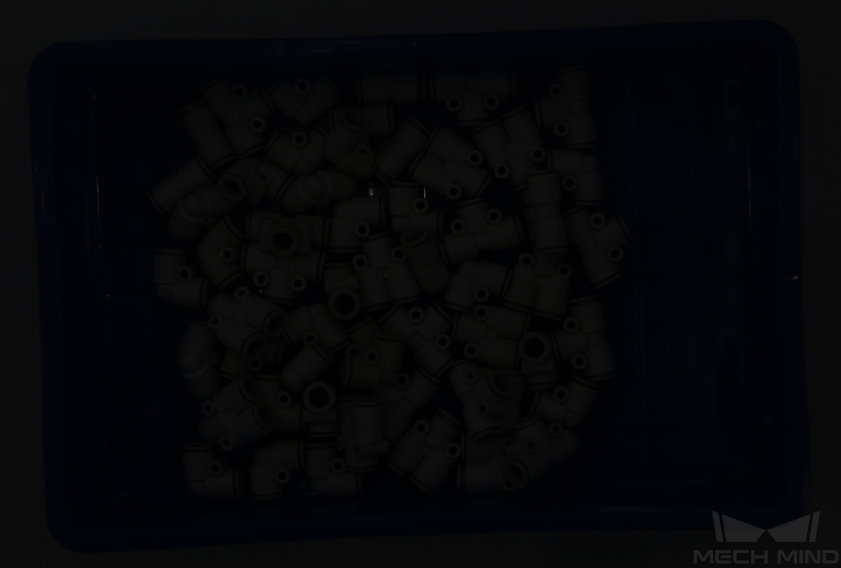
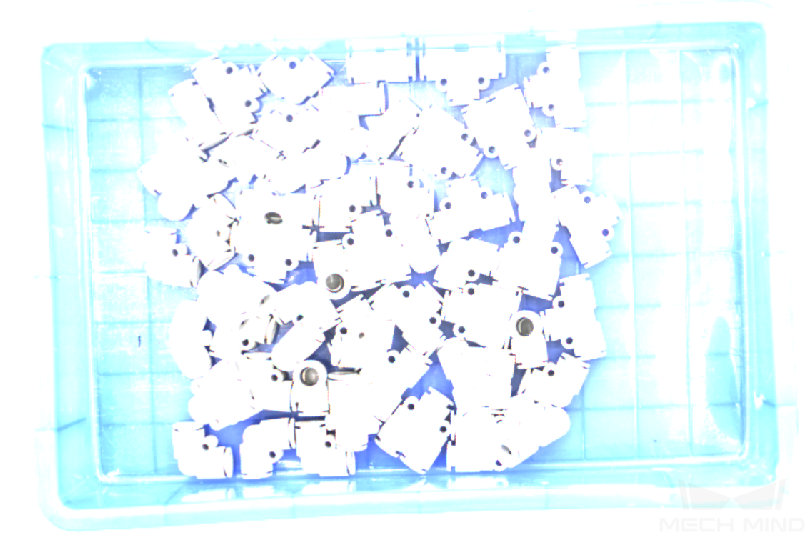
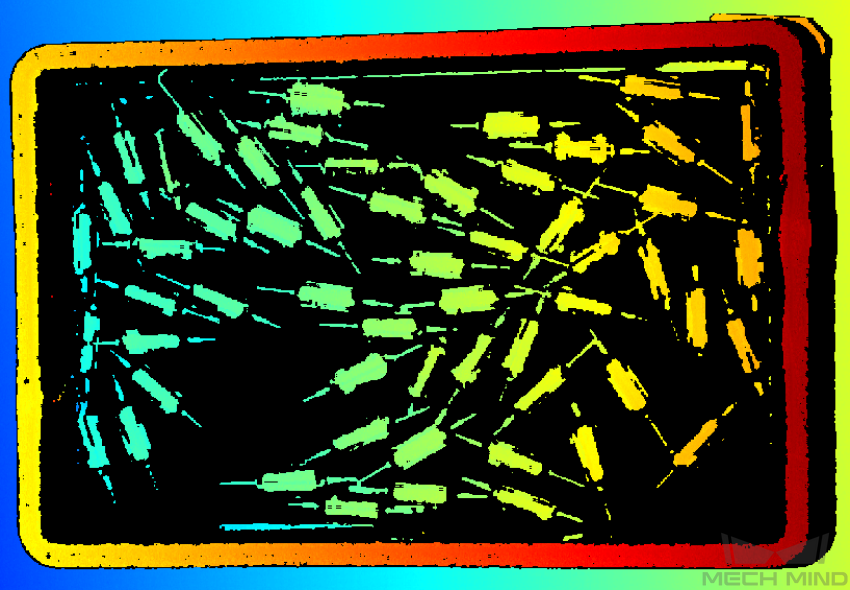
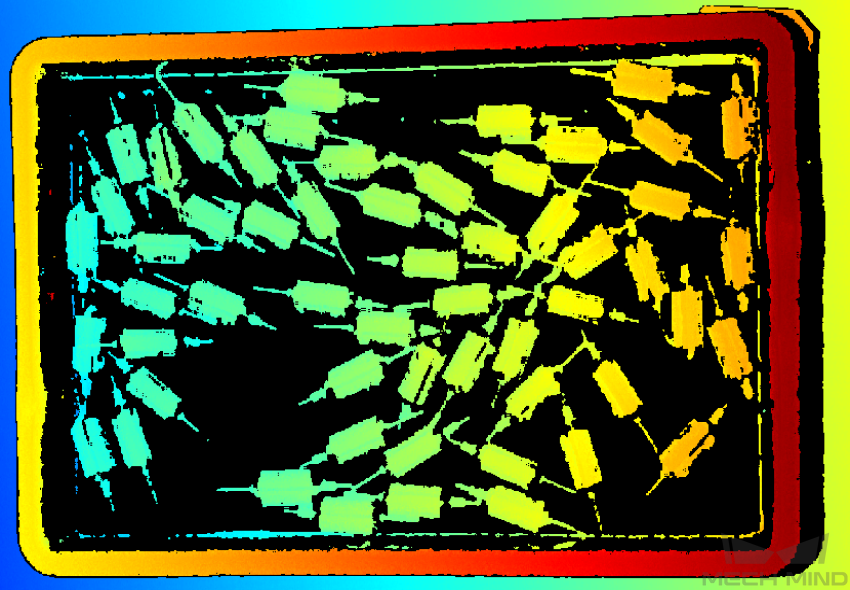
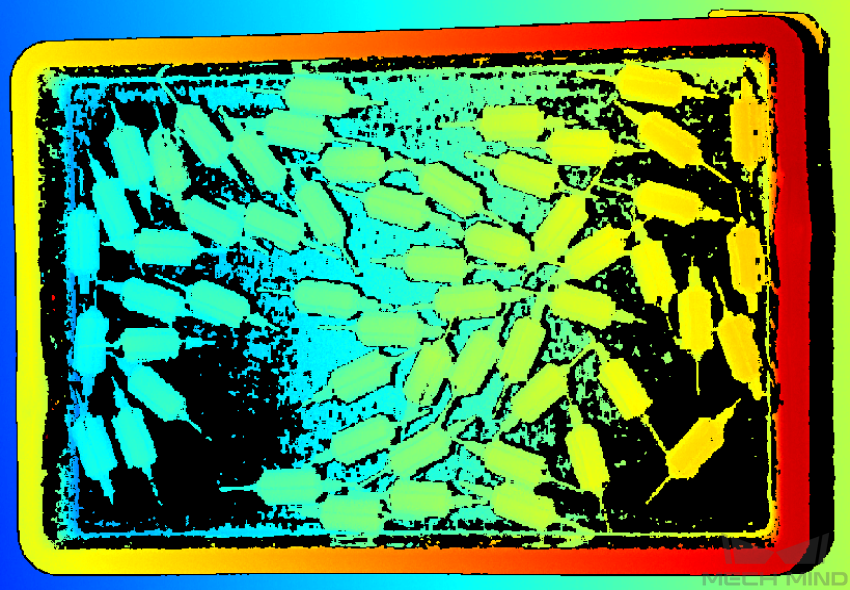
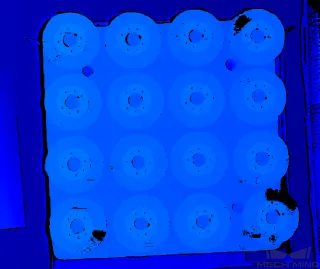
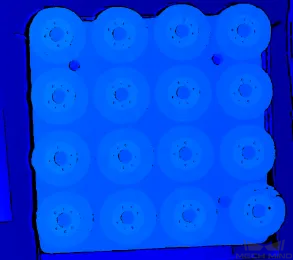
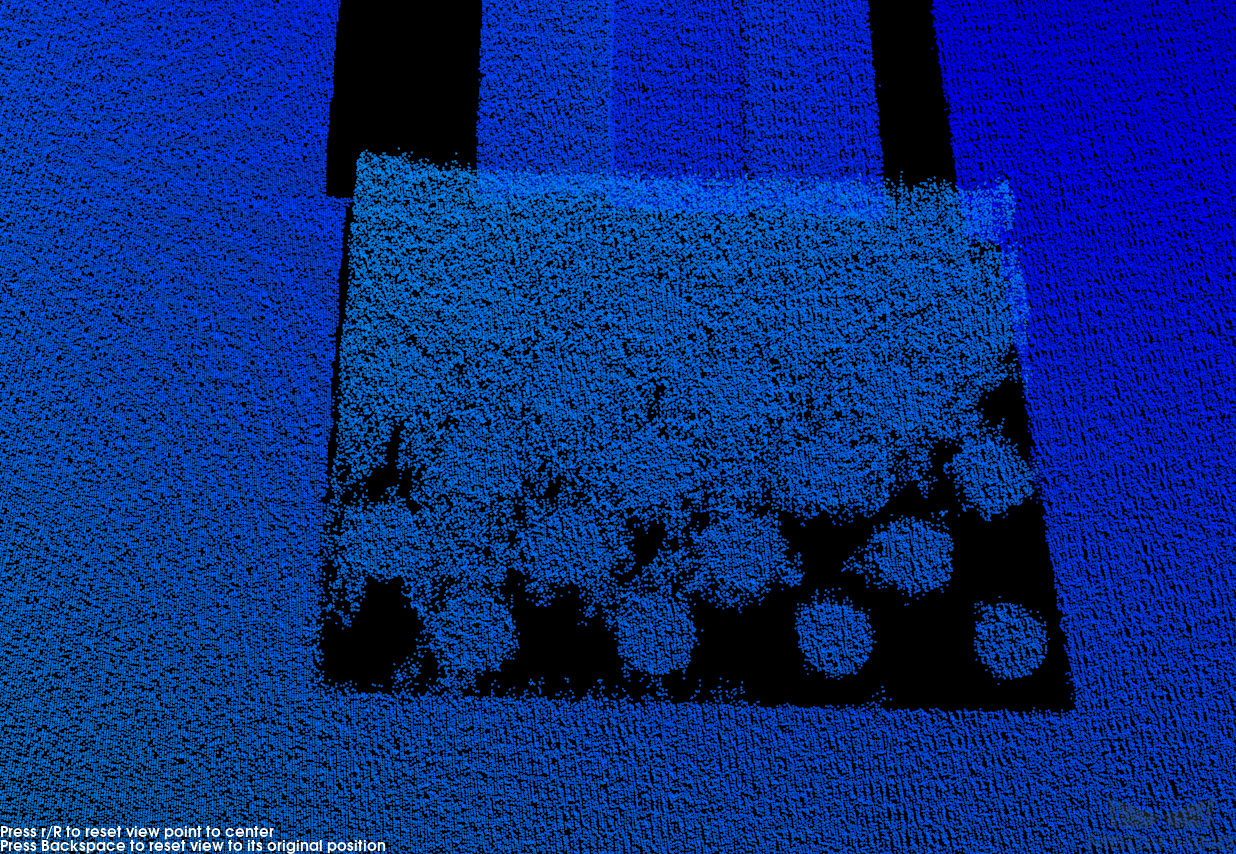
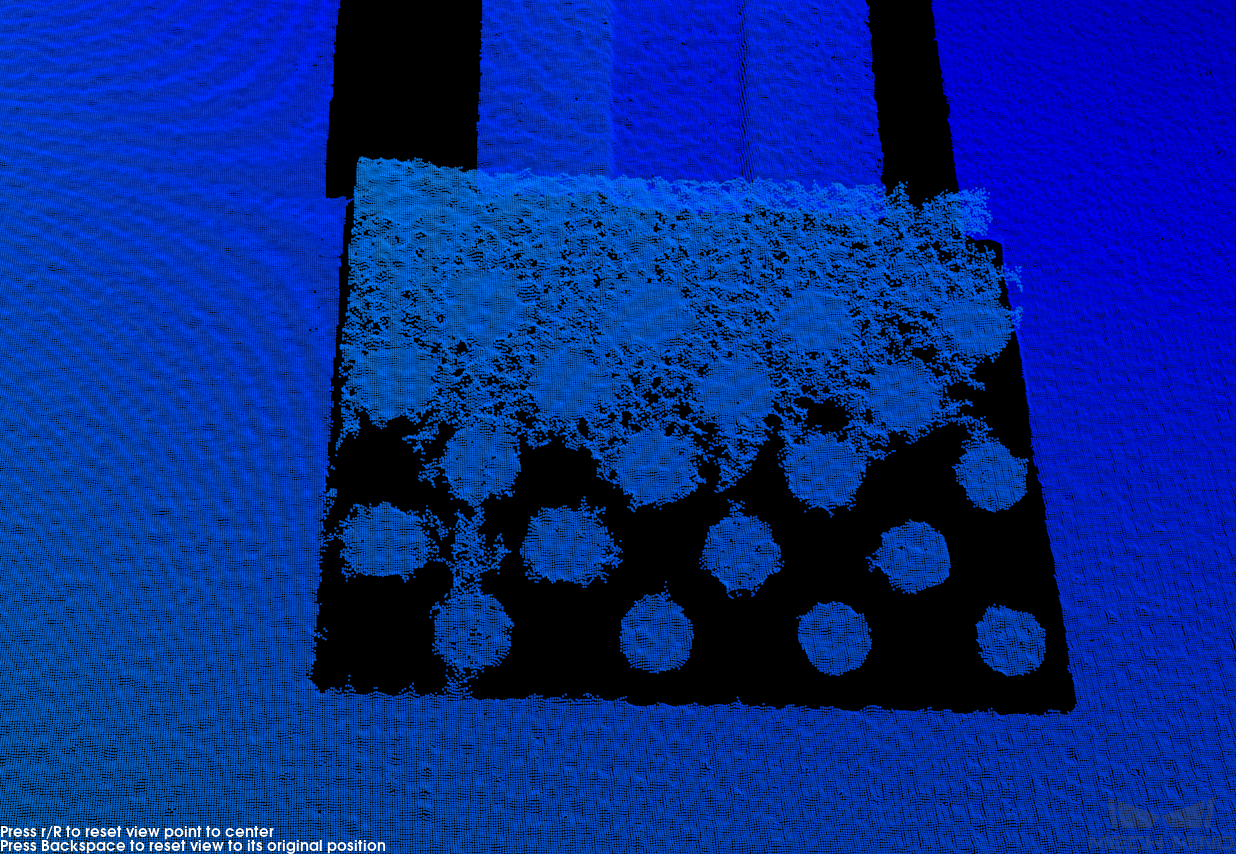
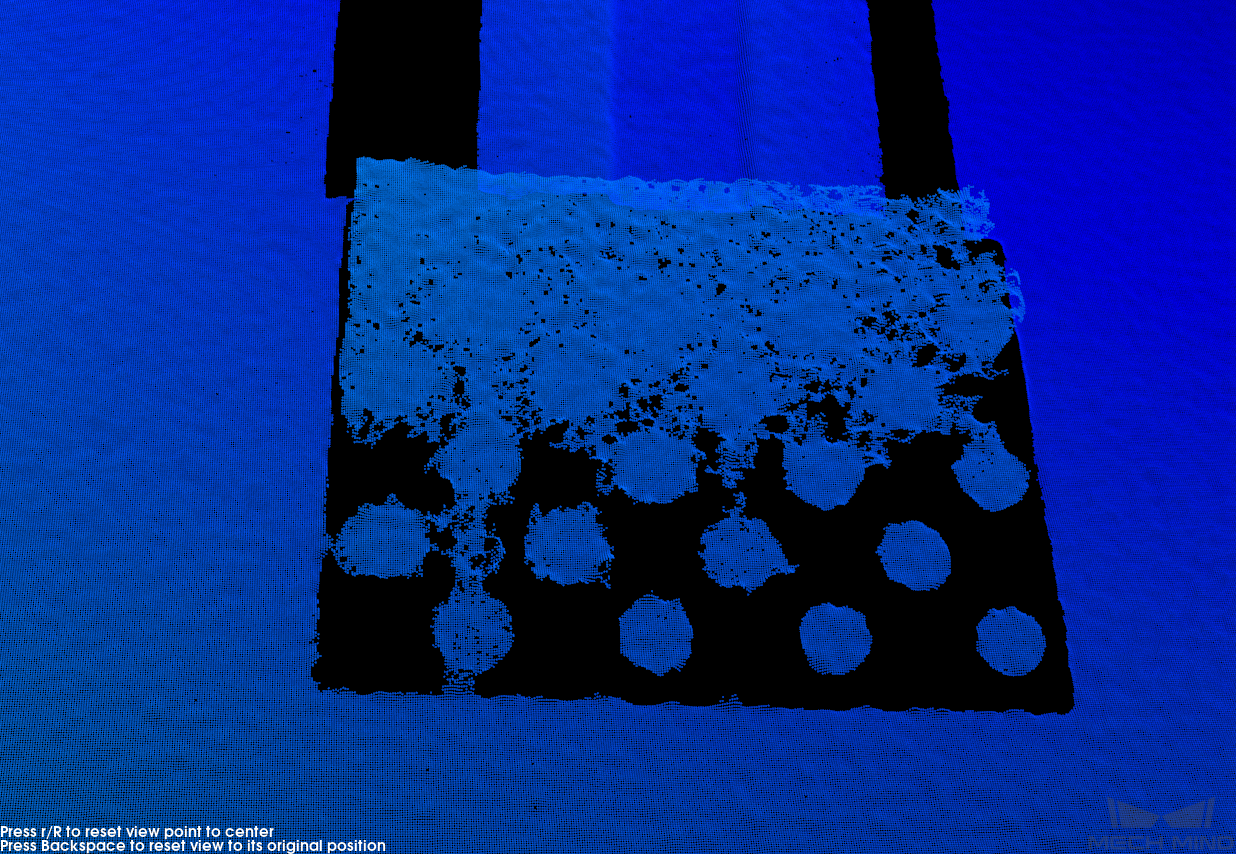
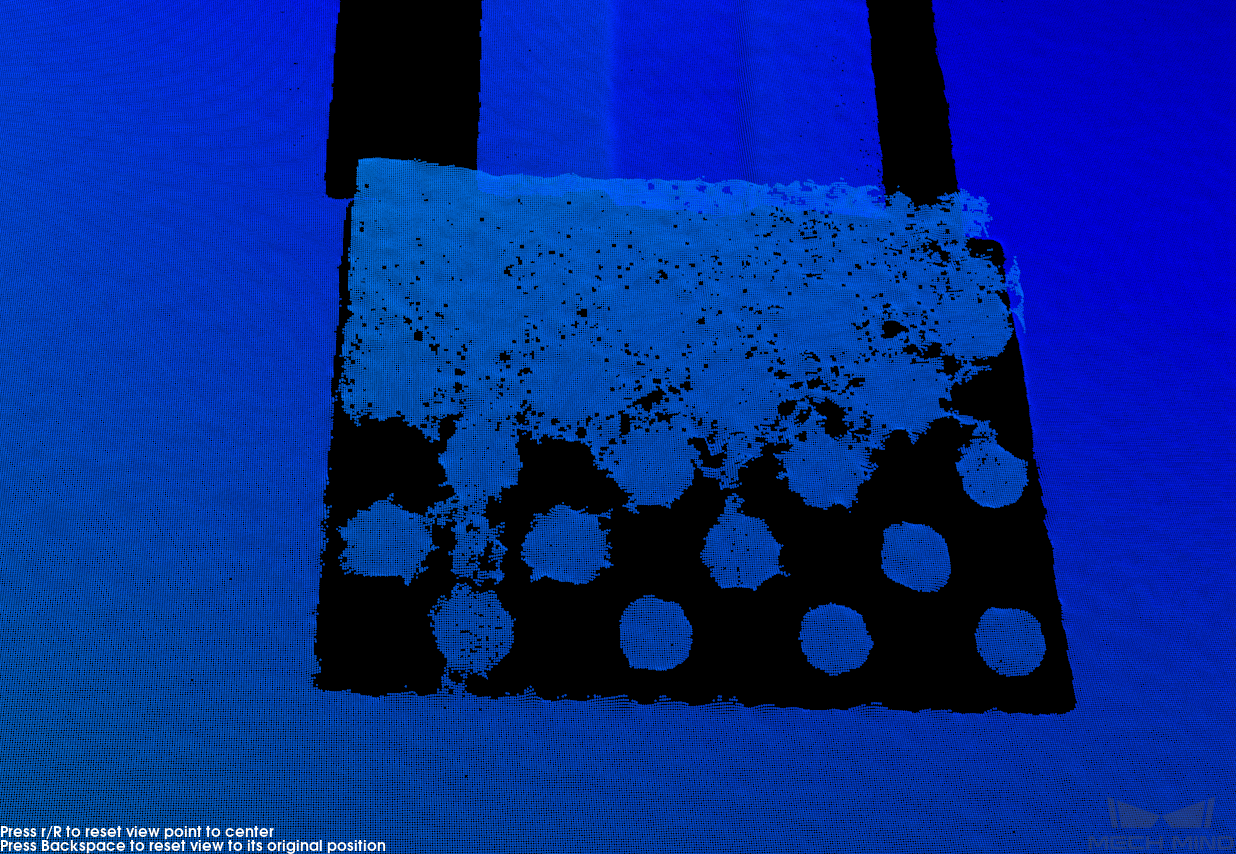
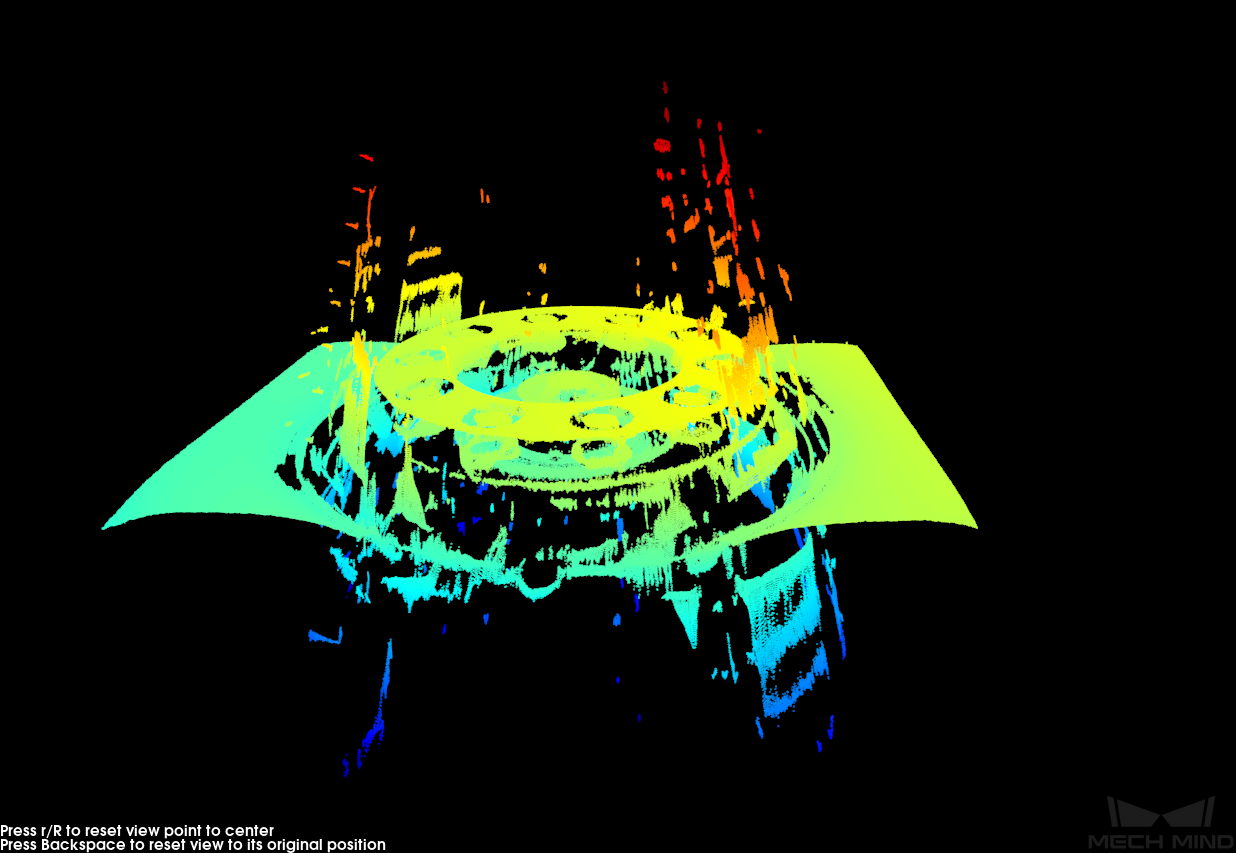
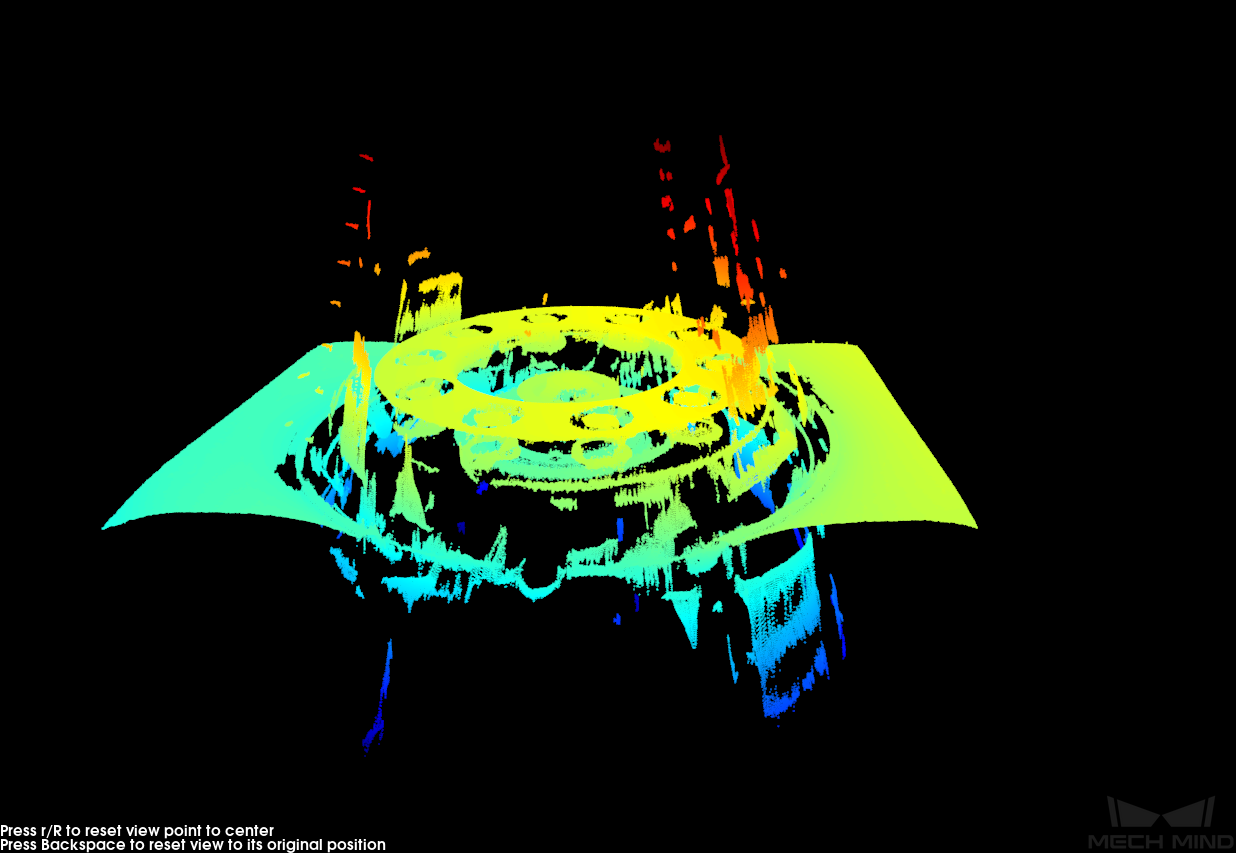
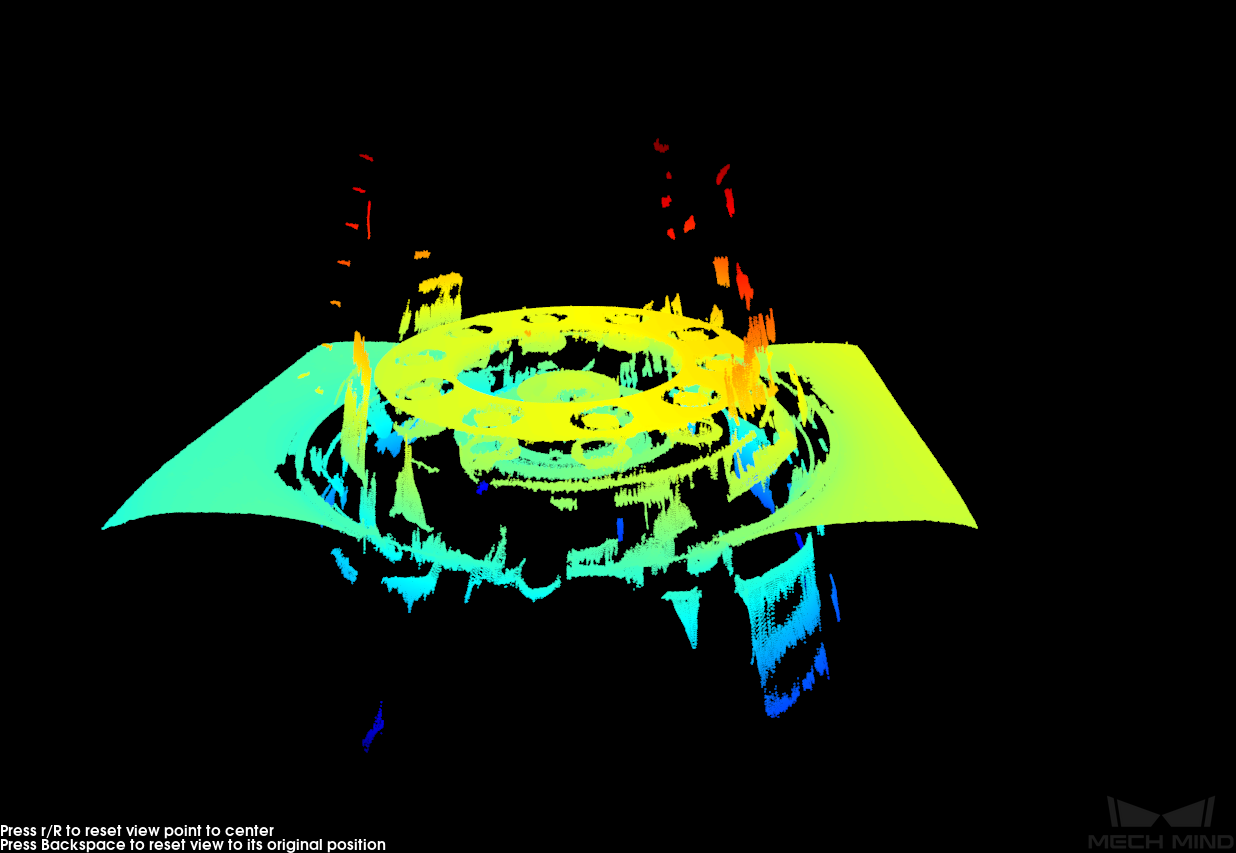
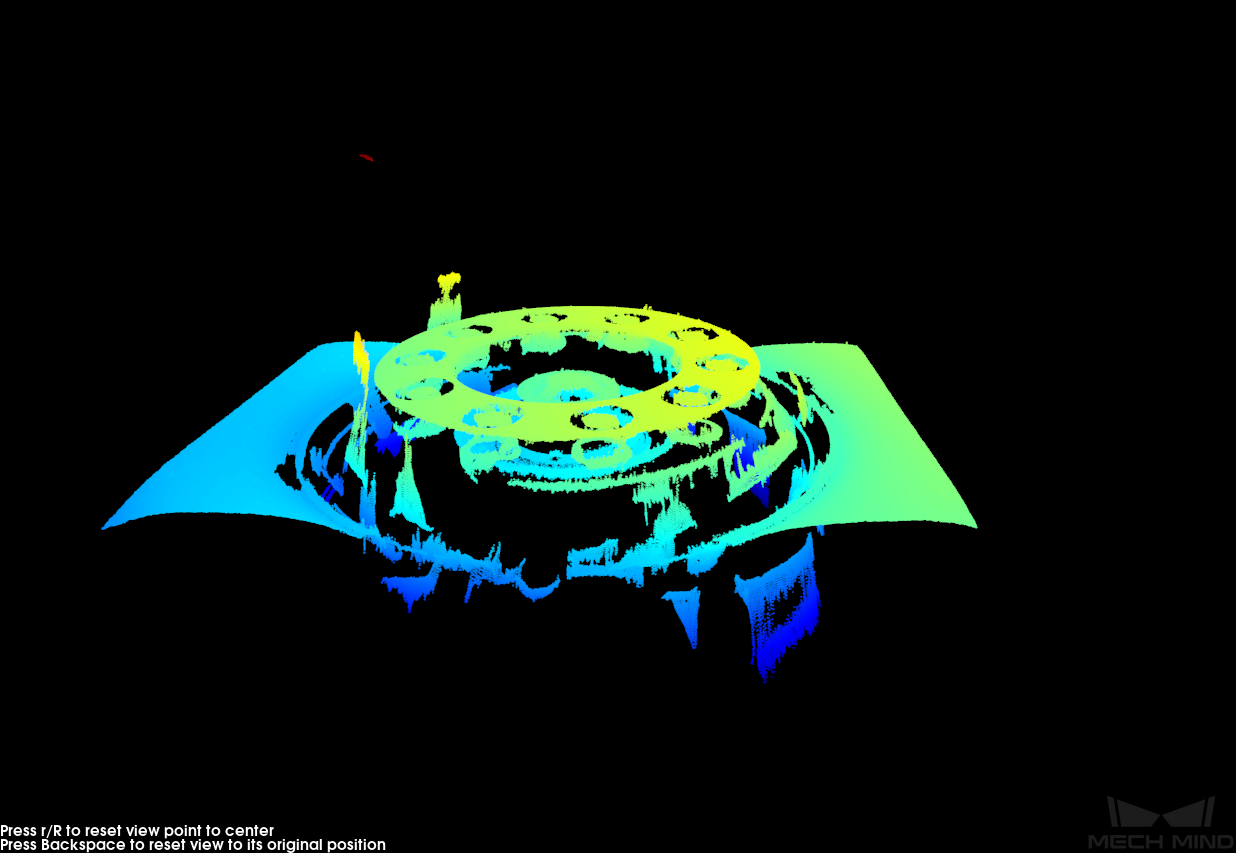
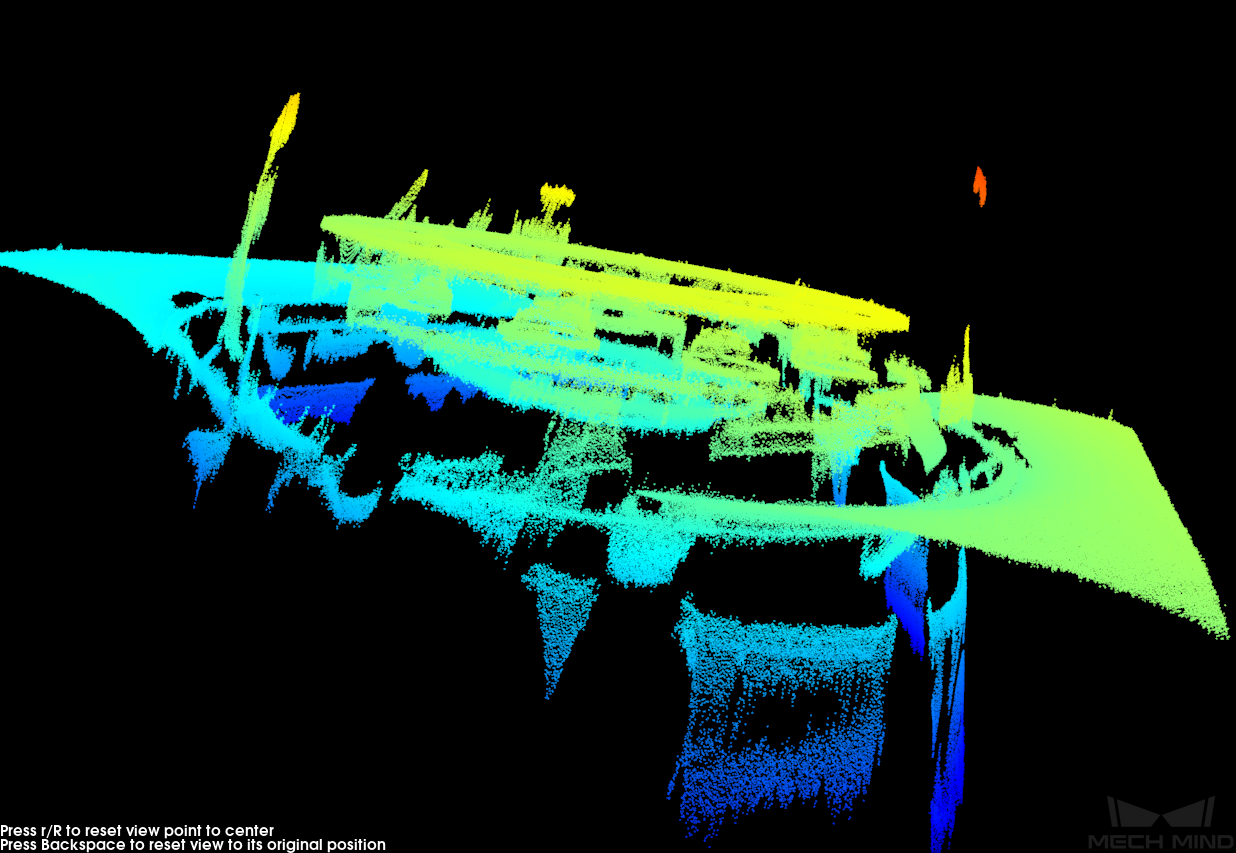
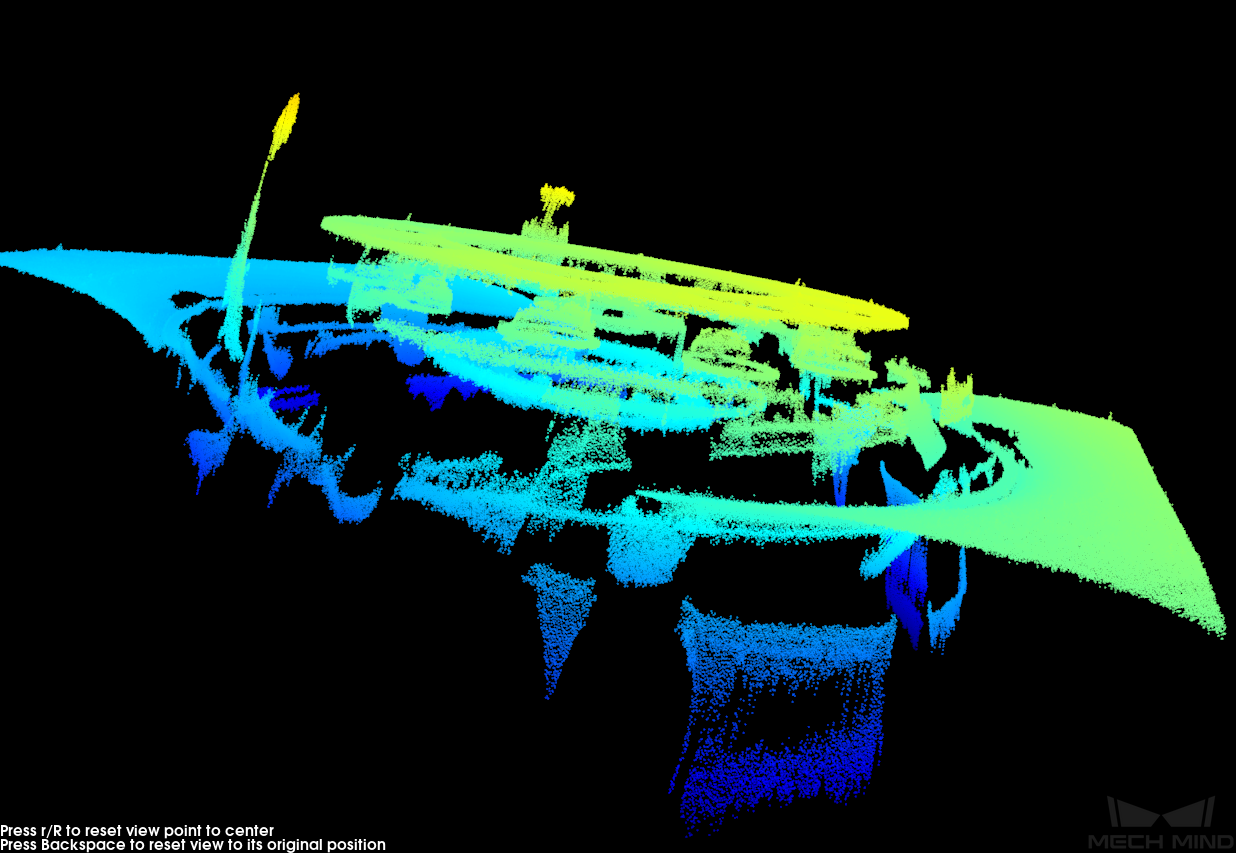
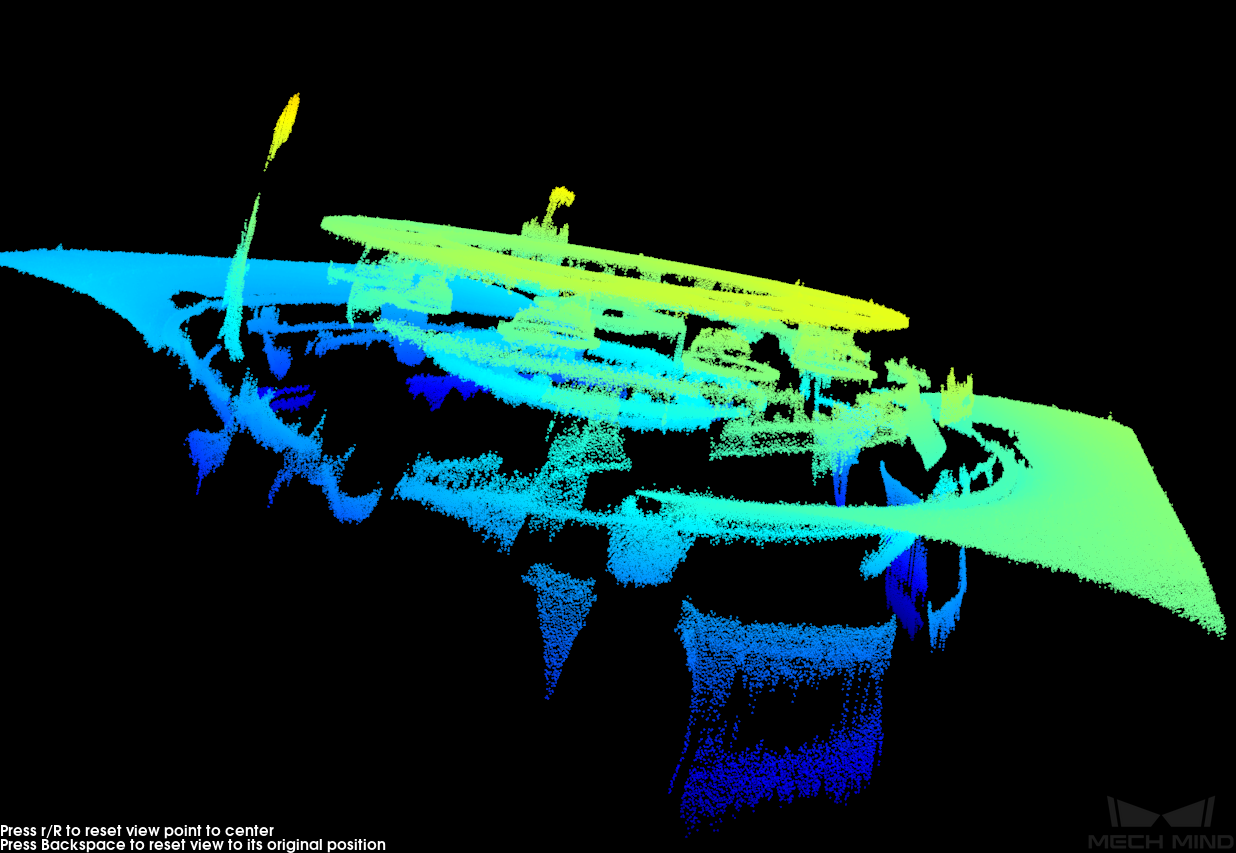
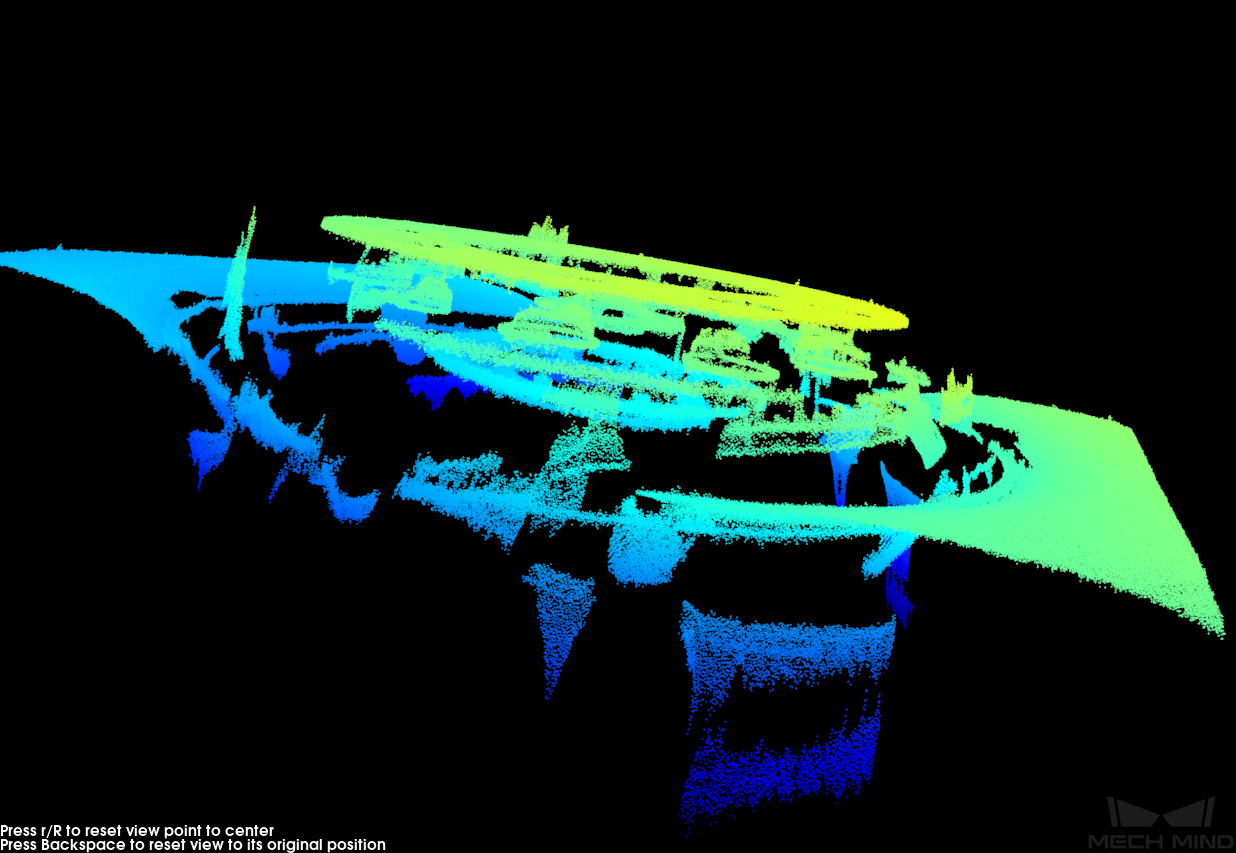
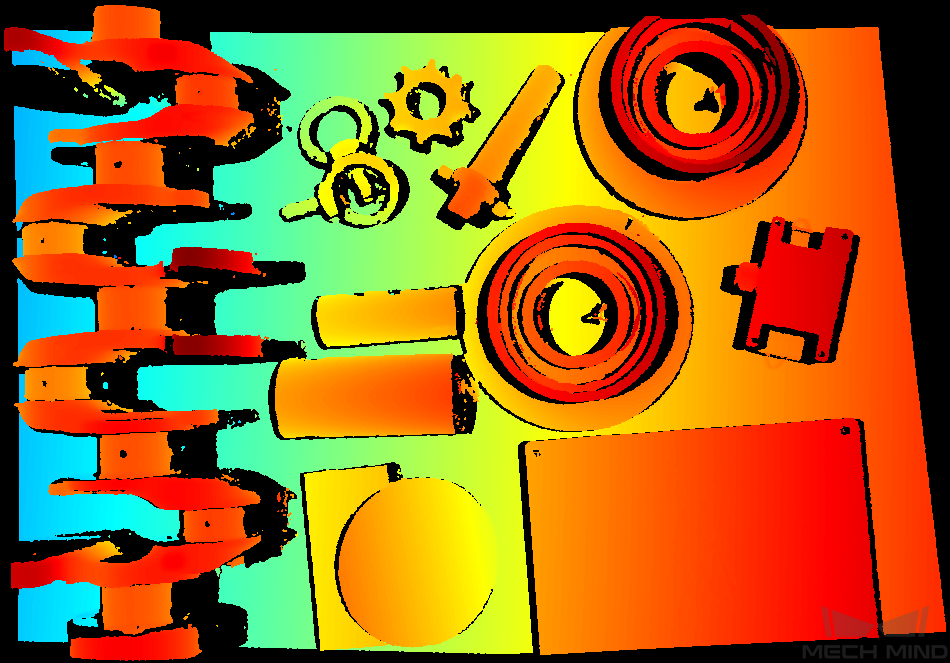
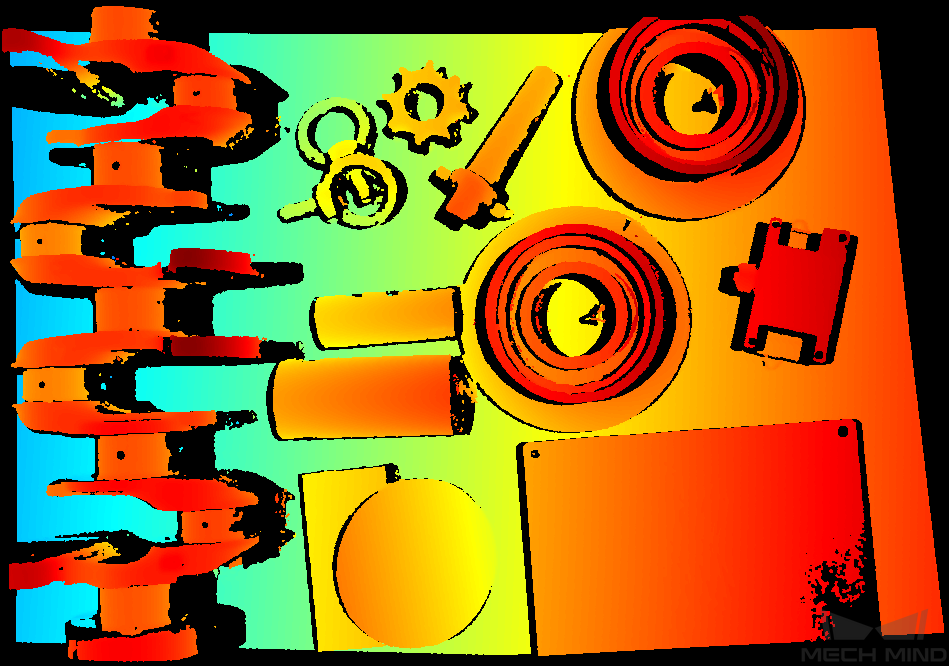
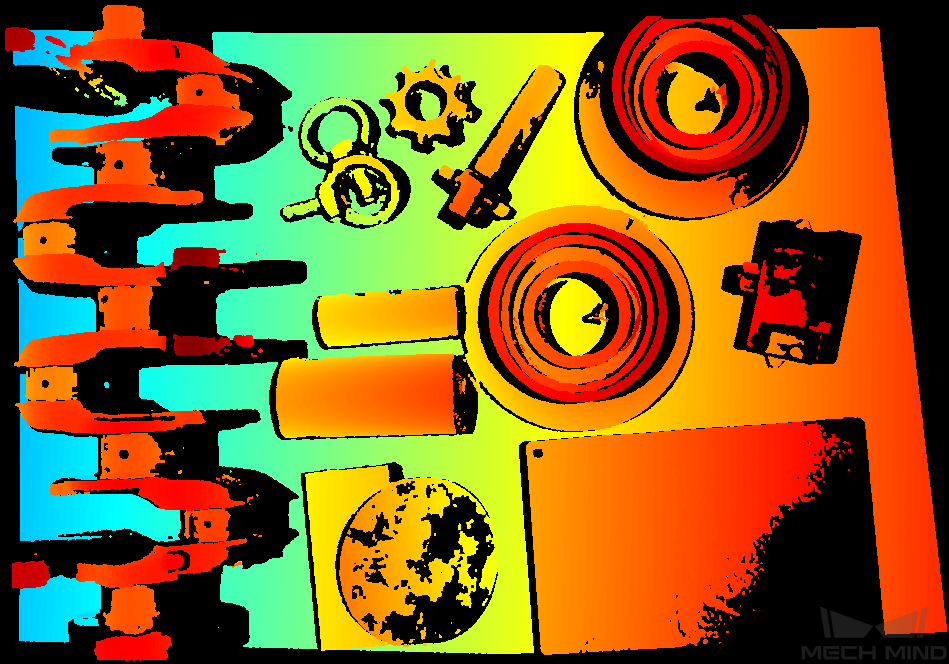
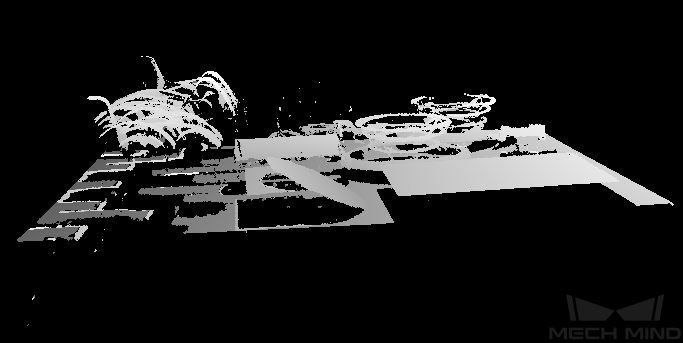
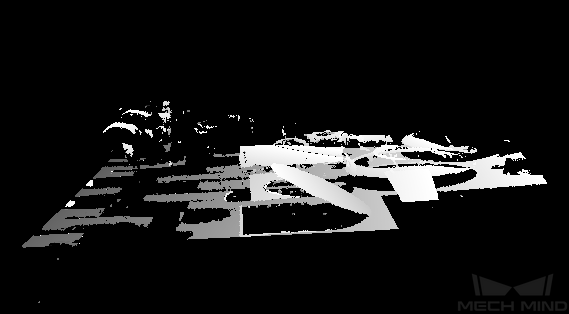
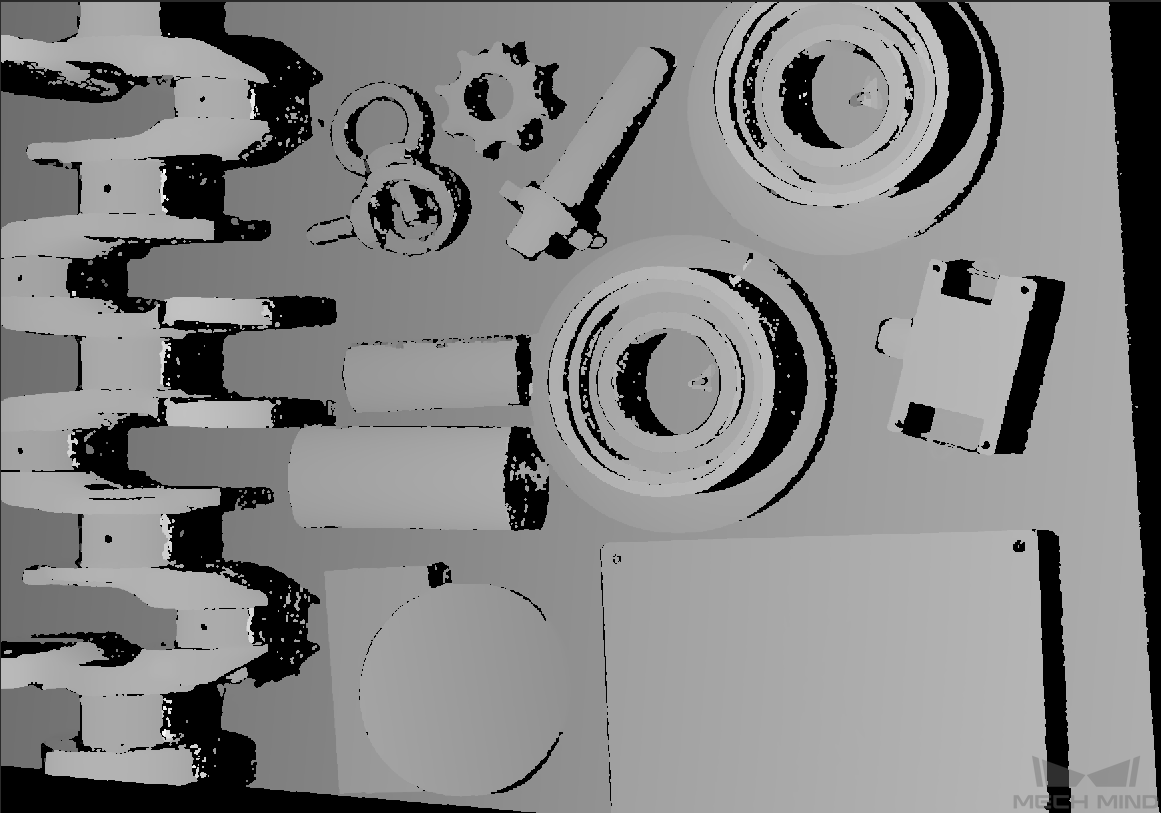
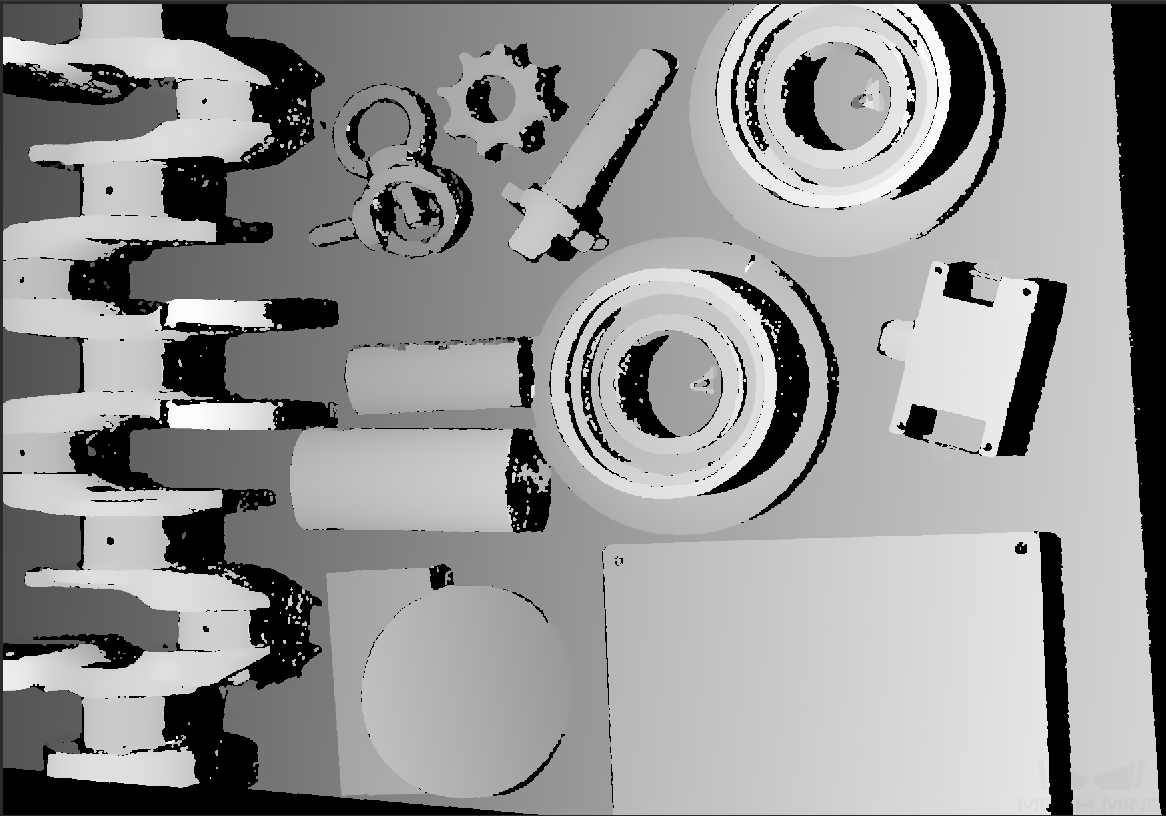
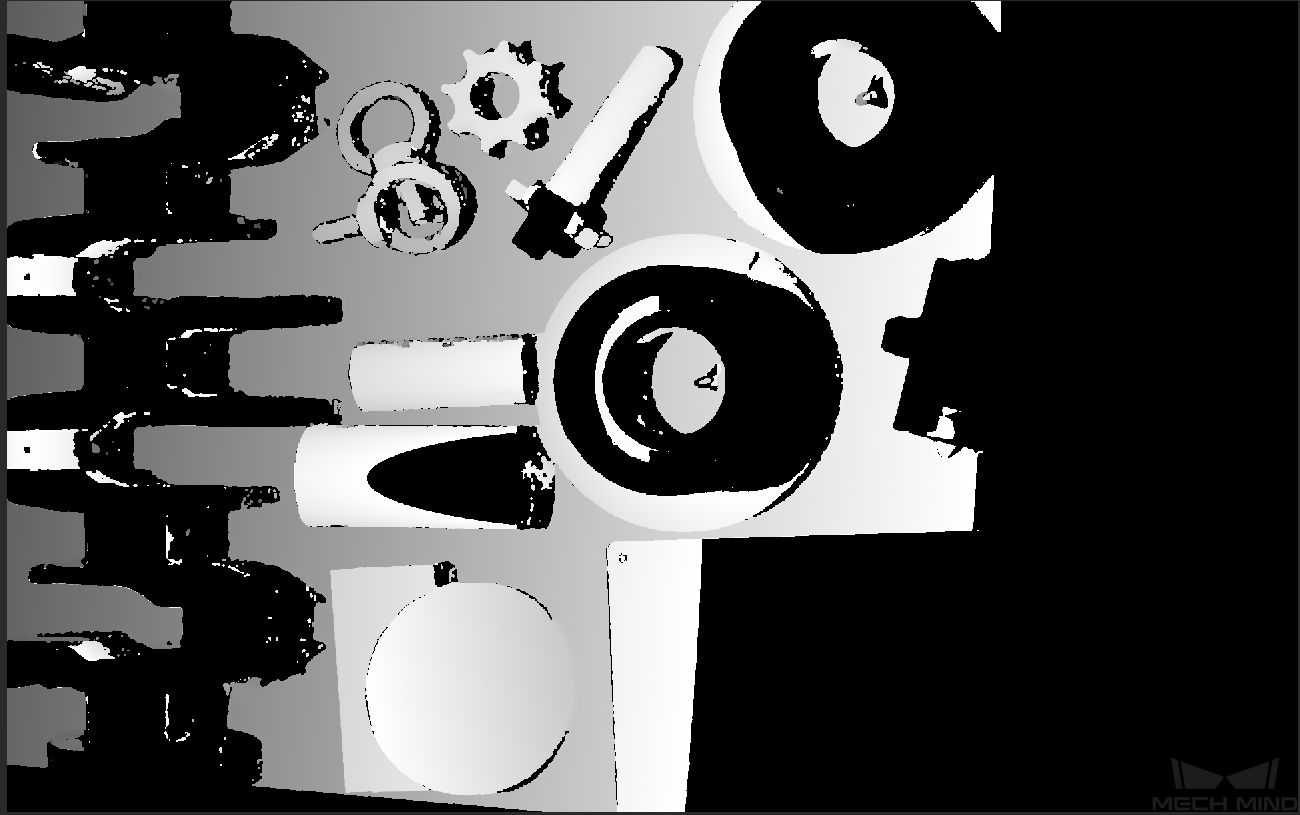
不同曝光时间对比图如下:
| 曝光时间1ms | 曝光时间4ms | 曝光时间10ms | 曝光时间50ms |
|---|---|---|---|
|
|
|
|

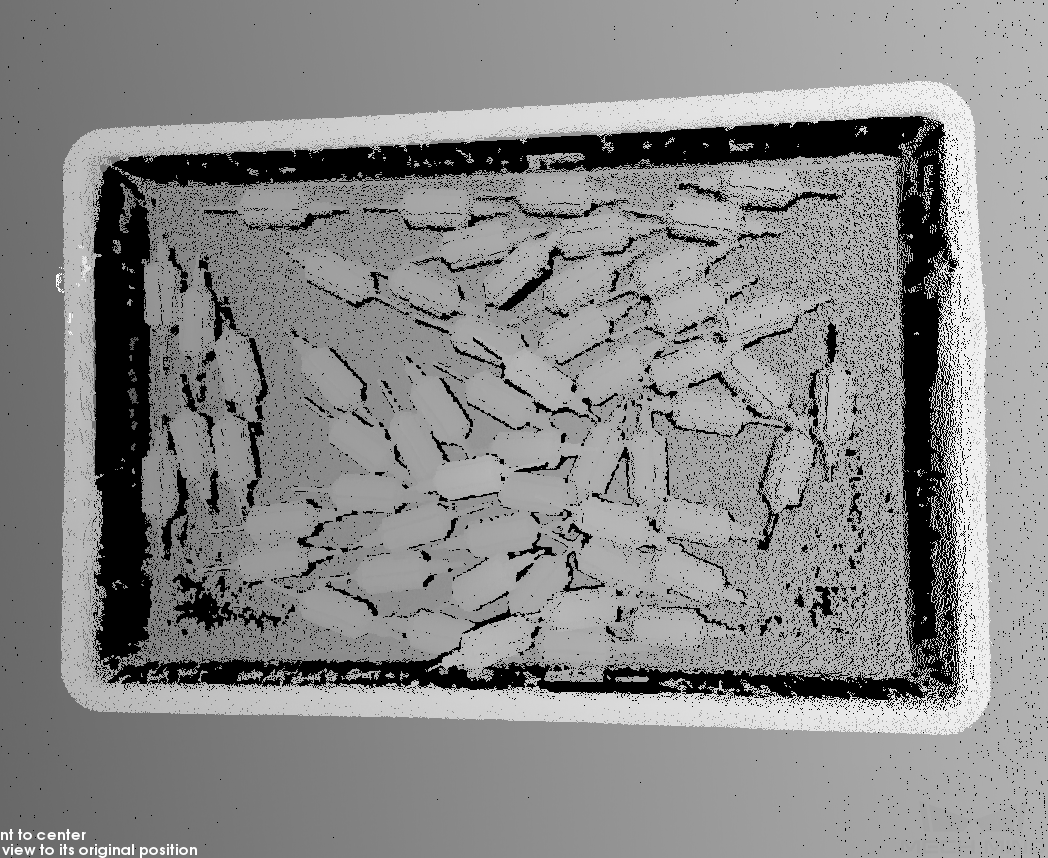
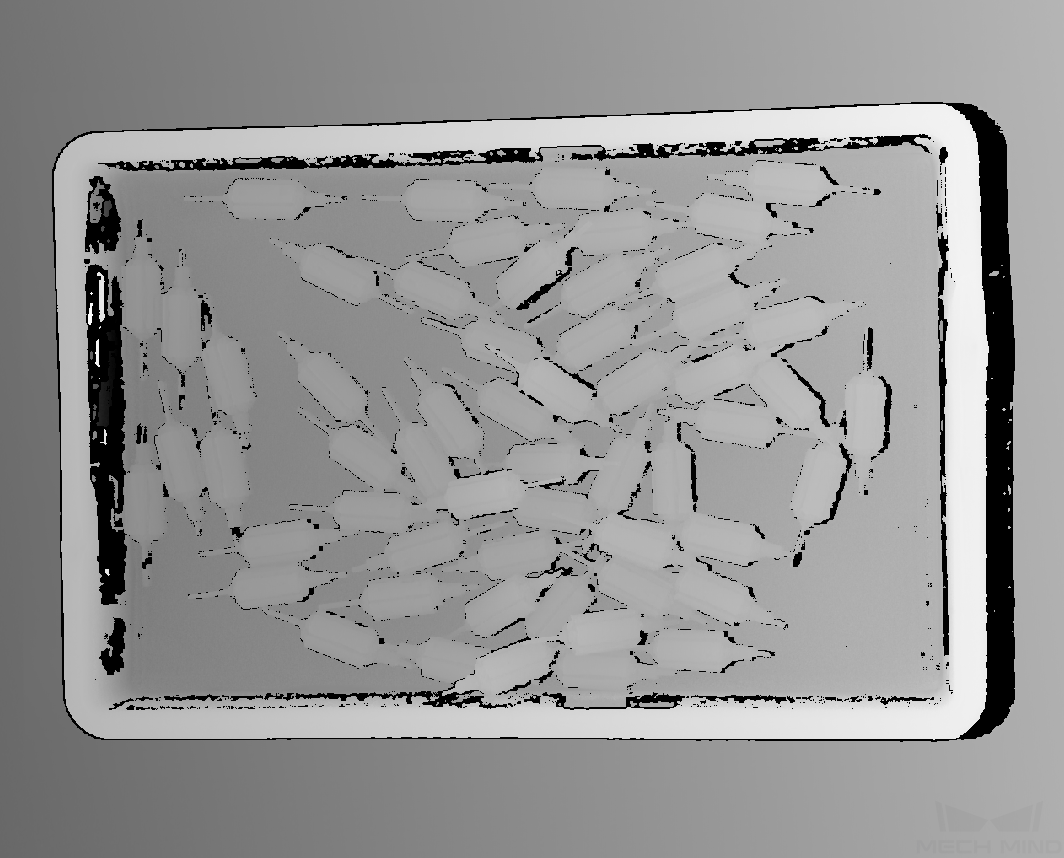
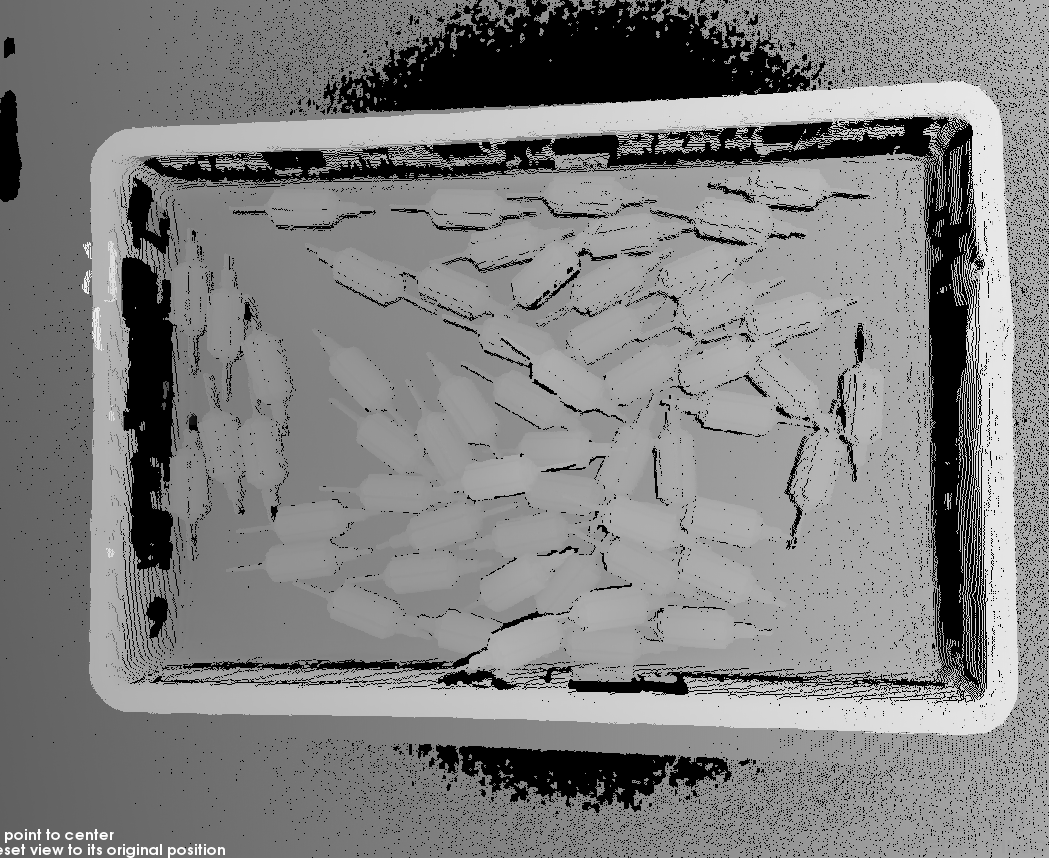
| 黑色部分缺少对应的物体点云。 |
相机增益
参数说明 |
用于增加图像亮度,但可能会引入噪点。
|
||
|---|---|---|---|
可见级别 |
专家、大师 |
||
参数取值 |
0~16dB |
||
调节说明 |
当设置曝光时间无法达到期望亮度时,可以使用该参数。 |
其他条件相同,仅相机增益不同的2D图和深度图对比如下:
| 0 | 5 | 10 |
|---|---|---|
|
|
|
|
|
|
激光
编码模式
参数说明 |
选择投射的结构光的样式。 |
|---|---|
可见级别 |
专家、大师 |
参数取值 |
|
调节说明 |
根据目标物体类型以及对数据质量和采集速度的实际需求调节。 选择反光物体时,将显示处理模式参数。 |
-
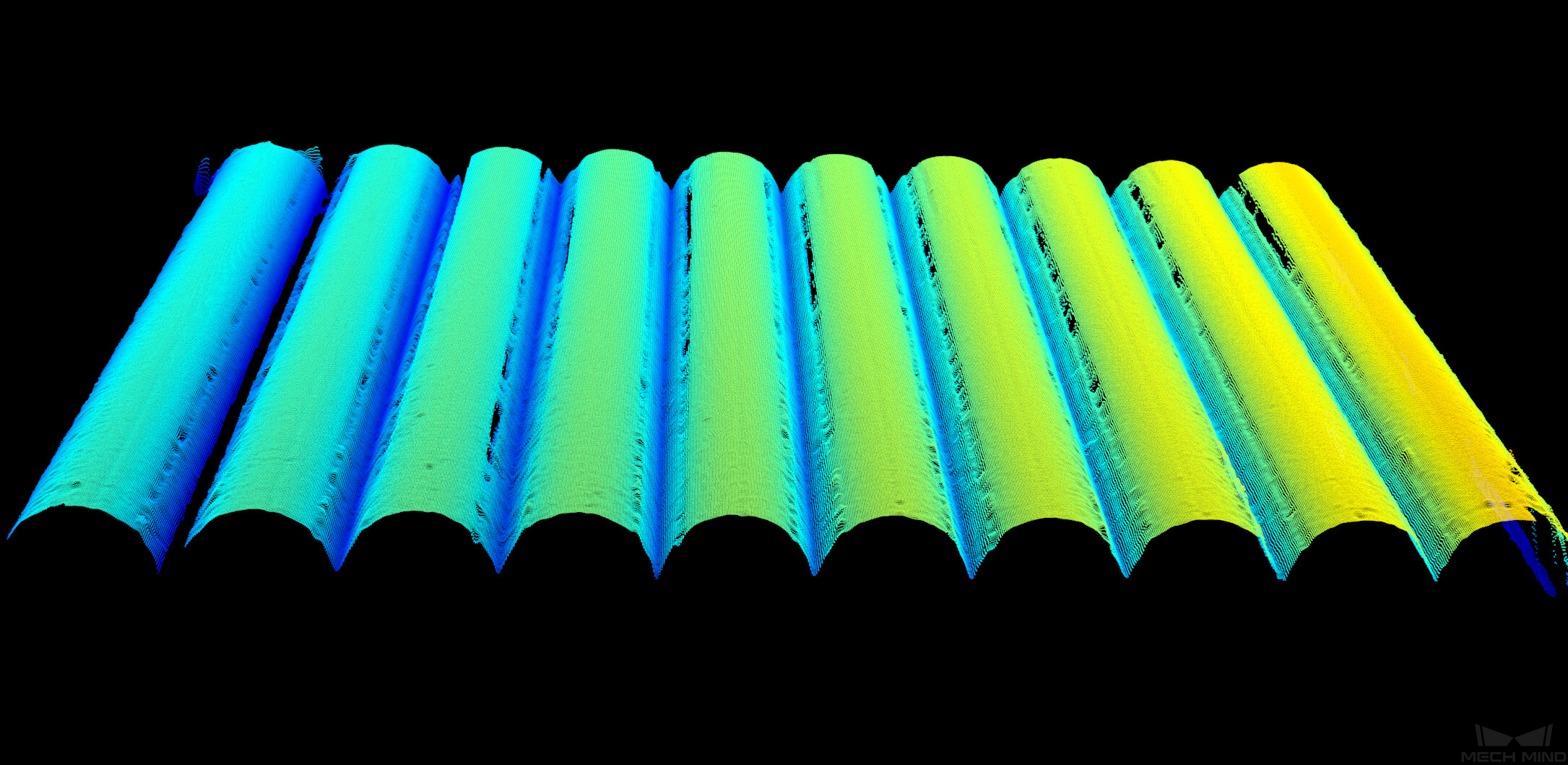
目标物体为不反光的物体时,其他条件相同,编码模式分别选择精确和快速时获取的点云如下:
精确 快速 

-
目标物体为反光物体时,其他条件相同,编码模式分别选择精确和反光物体时获取的点云如下:
精确 反光物体 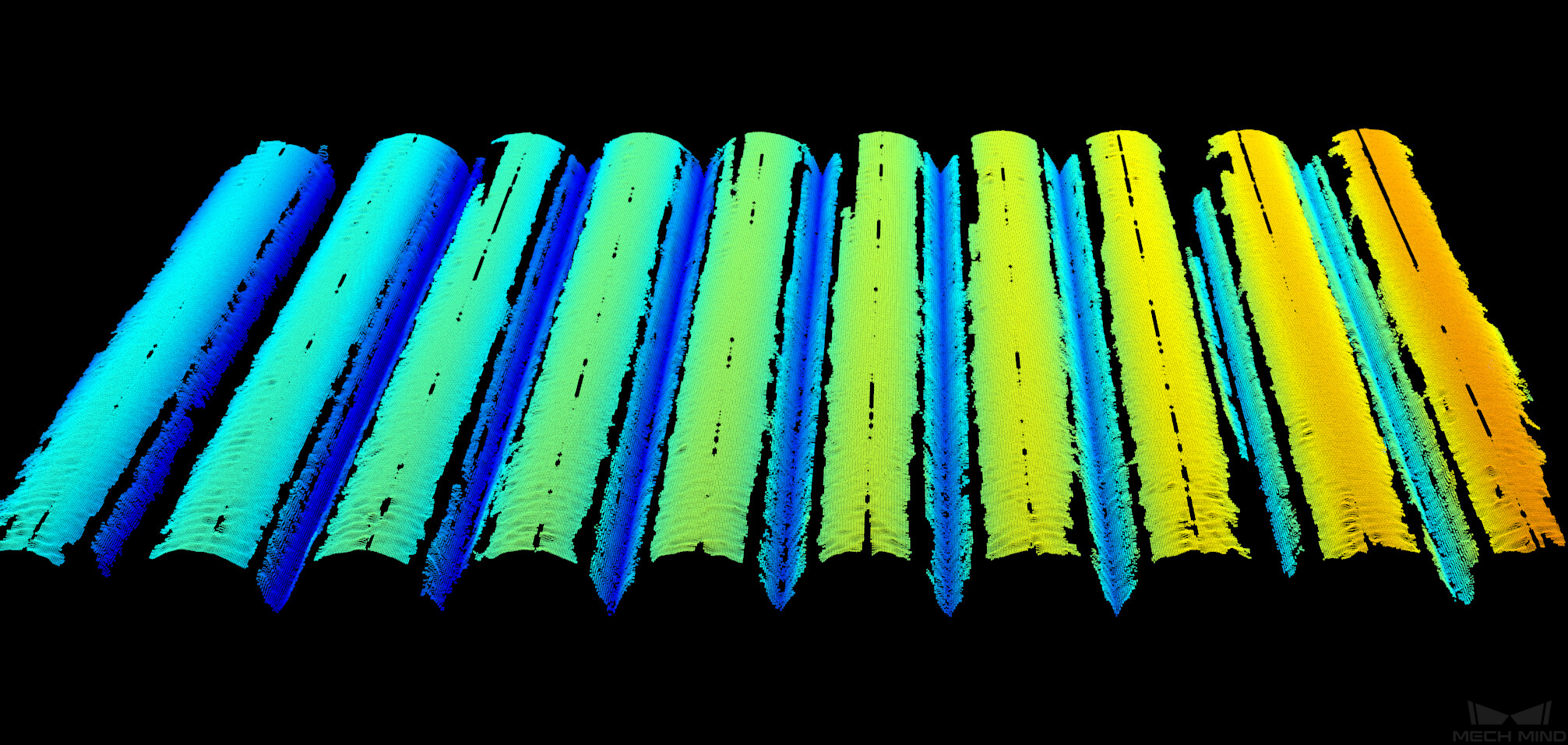
点云后处理
调节点云后处理分组下的参数,可提升点云质量。
调参原则
调节点云后处理参数时,遵循以下调参原则可减少相机采集时间,优化节拍。
-
优先调节离群点去除。该参数各强度计算时间基本相同,即使使用较高强度也不会增加太多计算时间。
-
建议使用低强度表面平滑与噪点去除。这两个参数强度越高,计算时间越长。
表面平滑
参数说明 |
可减少点云的深度波动,使点云更接近真实的物体表面,但会损失部分物体表面细节。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
|
其他条件相同,仅表面平滑强度不同的点云对比如下:
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
离群点去除
参数说明 |
去除点云中的离群点。离群点为游离于物体点云之外的成团的点。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
|
其他条件相同,仅离群点去除强度不同的点云对比如下:
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
噪点去除
参数说明 |
去除物体表面附近的噪点。噪点为位于物体表面附近的离散点。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
|
其他条件相同,仅噪点去除强度不同的点云对比如下:
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
| 如该功能移除了所需点云,可将噪点去除强度调低,但将保留更多噪点。 |
深度范围
参数说明 |
设置Z向感兴趣区域。在相机的工作距离范围内设置深度范围,可滤除深度范围外的数据。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
|
调节说明 |
|
不同深度范围效果对比:
| 范围过大 | 范围适中 | 范围过小 |
|---|---|---|
|
|
|
|
|
|

设置深度范围
执行以下步骤调节深度范围:
-
双击深度范围右侧的编辑,打开设置深度范围界面。
-
点击右边栏最上方的更新点云,获取最新的点云。
-
调整点云的位置:调整到可看到代表深度范围上下限的两个灰色长方形即可。
-
调节深度范围:拖动右侧滑动条上的滑块,大致调节深度范围。再输入数值,精准调节深度范围。
判断深度范围是否合适:所有必需的物体特征均位于两个灰色长方形之间,大多数噪点和离群点位于该区域之外。 -
设置完成后,单击右下角的保存。
|
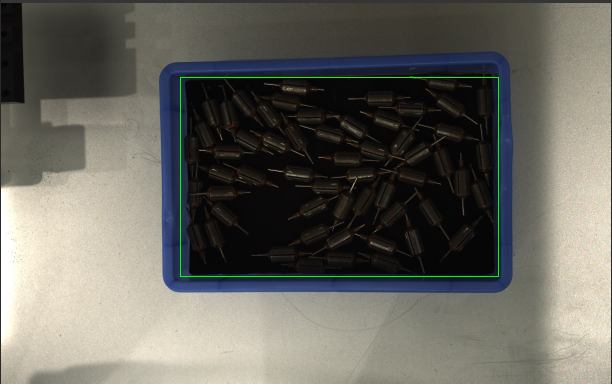
感兴趣区域
参数说明 |
设置深度图和点云在XOY平面上的感兴趣区域,所选区域外的点将被移除。 |
|---|---|
可见级别 |
初级、专家、大师 |
参数取值 |
无 |
调节说明 |
详见下方设置感兴趣区域。 |
设置感兴趣区域
-
双击感兴趣区域右侧的编辑,进入设置感兴趣区域页面。
-
在左侧选择并调节感兴趣区域。拖拽选框可调节位置,拖拽白色锚点可调节大小。
-
单击应用,应用设置的感兴趣区域。
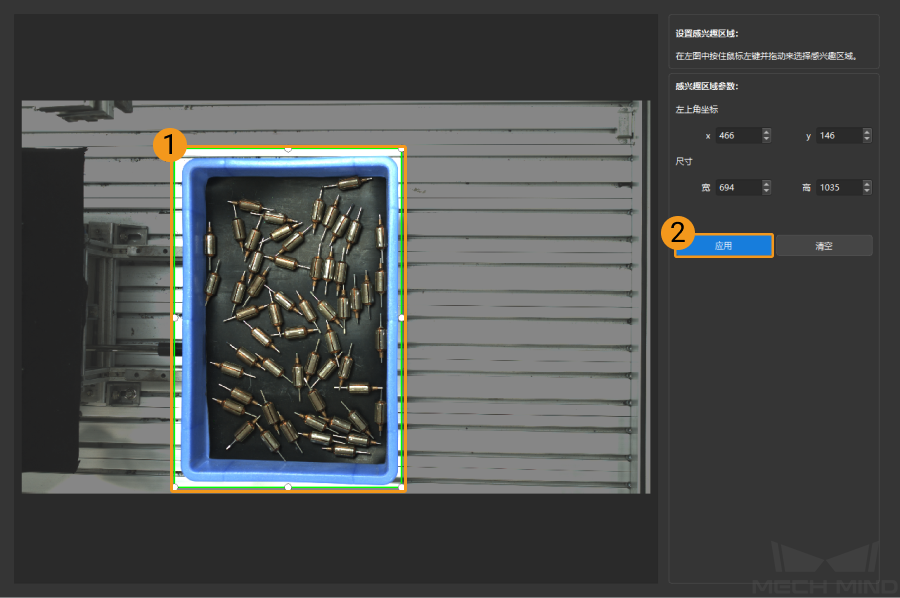
-
单击清空,可清除当前设置的感兴趣区域。
-
DEEP(V4)与LSR(V4)系列,在此界面显示的是2D图(深度源)。如果图像过暗或过亮,请调节2D图(深度源)曝光模式。
-
-
重新采集图像,查看深度图或点云,确认所设感兴趣区域的效果。