포즈를 추가함으로써 픽 포인트를 추가하기
픽 포인트는 물체에서 로봇이 피킹할 수 있는 위치입니다. 이 포인트는 물체 좌표계에 있으며 위치와 방향은 모두 물체를 기준으로 한 것입니다. Mech-Vision이 하나의 피킹 포즈 (피킹 시 로봇의 TCP 포즈)를 제공해야 로봇은 물체를 피킹할 수 있습니다. 이 피킹 포즈는 대상 물체에 있는 픽 포인트에서 변환된 것입니다. 따라서 포인트 클라우드 모델에 픽 포인트를 추가해야 Mech-Vision은 매칭 알고리즘을 통해 대상 물체의 픽 포인트를 생성할 수 있고 실제 피킹 포즈를 출력할 수도 있습니다.
|
사용자가 추가한 첫 번째 픽 포인트는 기본적으로 "기하학적 중심점"으로 설정될 것입니다. 다음은 "기하학적 중심점"에 관한 설명입니다.
|
-
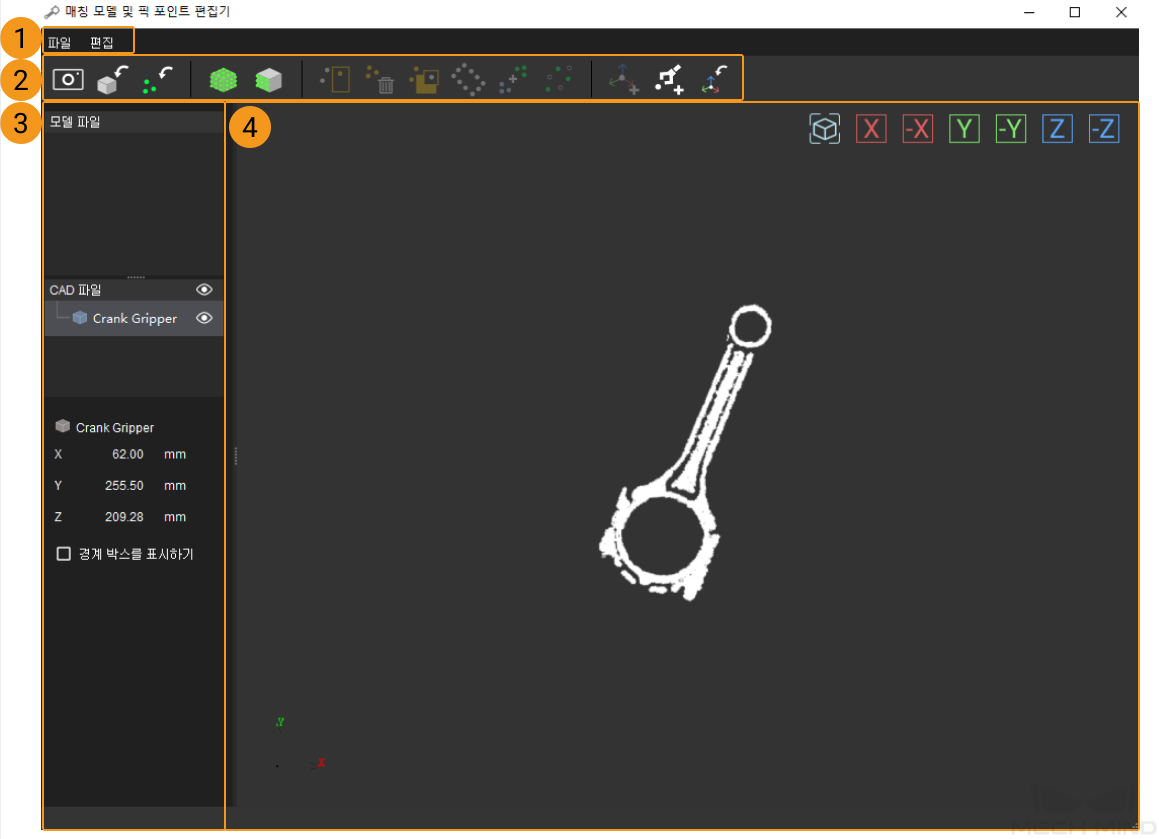
모델 파일 리스트에서 픽 포인트를 추가하려고 하는 포인트 클라우드 모델을 선택하고 툴 바에 있는
 을 클릭하면 하나의 포즈를 추가할 수 있으며 이 포즈는 바로 픽 포인트로 간주됩니다.
을 클릭하면 하나의 포즈를 추가할 수 있으며 이 포즈는 바로 픽 포인트로 간주됩니다.
|
|
-
모델 파일 리스트에서 픽 포인트를 선택하여 조정할 수 있습니다. 픽 포인트를 조정하는 방식은 다음과 같이 2 가지가 있습니다.
-
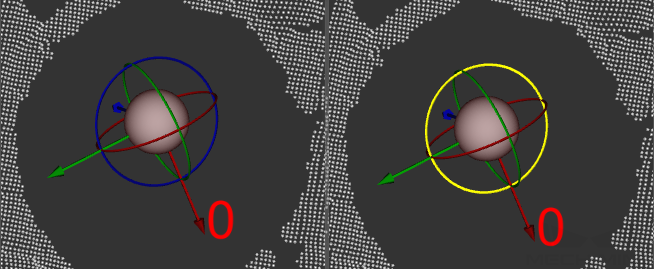
픽 포인트의 드래거를 통해 조정하기:
Ctrl 키를 누른 상태에서 드래거를 클릭하여 선택하고 드래그하여 드래거 방향을 따라 픽 포인트를 조정할 수 있습니다. 클릭하면 드래거의 색상이 노란색으로 바뀌면 드래거가 선택되었음을 나타냅니다. 아래 그림에서 왼쪽이 선택 전이고 오른쪽이 선택 후입니다.
-
포즈의 데이터 편집을 통해 조정하기:
CAD 파일 목록에서 포즈를 편집할 수 있습니다. 포즈 편집 구성 요소를 참조하십시오.
-
-
설정이 완료되면 (단축키Ctrl+S)을 클릭하면 포인트 클라우드 모델과 픽 포인트는 프로젝트 폴더/resource/3d_matching에 저장됩니다.
-
xxx.ply: 포인트 클라우드 모델 파일
-
geo_center.json: 모델 기하학적 중심점의 포즈 파일
-
pick_points.json: 픽 포인트의 포즈 파일
-
pick_points_labels.json: 픽 포인트 포즈의 레이블 파일
-
|
해당 도구의 창을 닫으면 파일 저장 여부에 관계없이 저장할지 여부를 묻는 팝업 창이 나타납니다. |