작업물 피킹 허용 편차
이 부분에서는 작업물의 피킹 허용 편차에 대해 설명하겠습니다.
소개
일부 작업물을 피킹할 때 로봇의 피킹 포즈가 일정한 각도 범위 내에서 유연하게 조절될 수 있으며 이 각도 범위는 피킹 허용 편차입니다. 피킹 허용 편차를 설정함으로써 로봇은 이러한 "허용 가능한 편차"를 적극적으로 활용하여 충돌 및 싱귤래리티와 같은 문제를 피할 수 있습니다.
배치 포즈가 "작업물 포즈"로 설정된 경우, 소프트웨어는 피킹 허용 편차를 적용할 때 피킹 시의 실제 포즈와 배치 포즈 사이의 각도를 자동으로 기록합니다. 물체를 배치할 때 소프트웨어는 이 각도에 따라 TCP 포즈를 조정하여 말단장치가 올바른 배치 포즈에 따라 물체를 내려놓도록 합니다.
허용 편차 범위 및 시도 간격
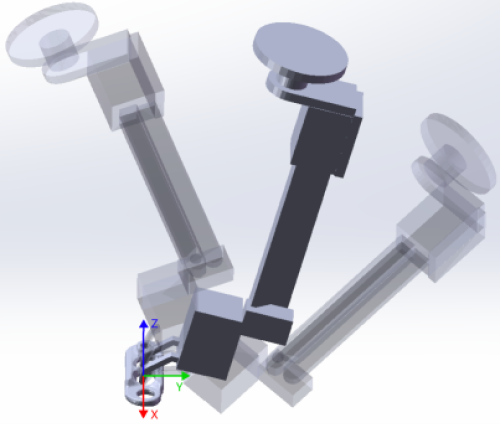
허용 편차 범위는 피킹 포즈와 비전 포즈 사이에서 각도 편차의 최대한 허용 범위입니다(아래 그림에서 B,C 사이의 각도는 허용 편차 범위입니다).
시도 간격은 한번 피킹을 시도할 때마다의 각도 간격을 가리킵니다(아래 그림 속의 ∠ a는 시도 간격입니다).

A는 말단장치가 픽 포인트에 있을 때의 피킹 포즈이며, B와 C는 시도 범위 경계에 있을 때의 피킹 포즈입니다.