로봇 모델의 제작 및 도입
소프트웨어의 빌트인 로봇 라이브러리와 온라인 로봇 라이브러리에서 필요한 로봇을 찾을 수 없는 경우, 이 부분 내용을 참조하여 로봇 모델을 제작하고 소프트웨어로 도입할 수 있습니다. 구체적으로 다음과 같습니다:
FANUC M-900iB/400L 로봇을 예시로 설명하도록 하겠습니다.

[robot]_algo.json 파라미터 파일을 작성하기
[robot]_algo.json 템플릿 파일
[robot]_algo.json의 템플릿 파일Mech-Viz은 설치 경로 `C:/Users/Administrator/AppData/Roaming/Mmind/robot/profile_example.json`에 위치하며 이 파일을 기반으로 새로운 로봇의 _algo.json 파일을 작성할 수 있습니다.
| [robot]_algo.json 파일 속의 각 파라미터의 의미는 robot_algo.json 파일 파라미터 설명 내용을 참조하십시오. |
로봇 구성(algo_type)을 확인하기
로봇은 다양한 구성으로 나눠지며 로봇의 구성이 다르면 좌표계와 DH 파라미터에 관한 정의도 다릅니다.
상세한 정보는 로봇 구성 내용을 참조하십시오.
FANUC M-900iB/400L 로봇은 일반적인 6축 볼형 손목 산업용 로봇으로 SphericalWrist_SixAxis 구성에 속합니다.
DH 파라미터(dh、dhPassive)를 확인하기
로봇 구성 부분에서 로봇의 구성 유형을 참조하여 해당 로봇의 구성 다이어그램을 찾아 로봇 설명서에 따라 [robot]_algo.json 속의 dh 값을 확인하십시오.
FANUC M-900iB/400L 로봇의 dh 파라미터는 다음과 같습니다: a=0.940, b=0.410, c=1.120, d=0.250, e=2.180, f=0.300.
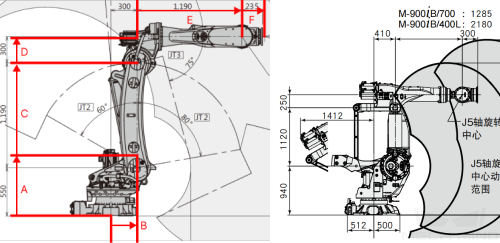
왼쪽은 SphericalWrist_SixAxis 로봇 구성 다이어그램이고 오른쪽은 FANUC M-900iB/400L 로봇의 치수가 표시된 다이어그램입니다.
로봇 각 축의 리미트(minlimits, maxlimits)를 확인하기
보통 로봇의 각 축의 이동 범위는 로봇 매뉴얼에서 알 수 있지만 FANUC 로봇은 특수하므로 FANUC 로봇 시뮬레이션 소프트웨어 RoboGuide에서 해당 내용을 찾아야 합니다.

기타 파라미터를 확인하기
일반적인 로봇 브랜드의 경우 추가된 다른 로봇의 기존 데이터를 참조할 수 있습니다. 참조할 수 있는 기존 데이터가 없는 경우, 작업 현장에서 일하는 엔지니어가 실제 로봇에 따라 다음과 같은 파라미터를 확인해야 합니다: mastering_joints, axis_flip, base_z_offset, axis_flip, mastering_joints.
-
json 파라미터 파일 속의 서로 다른 데이터 항목을 구분하기 위해 영어 문장 부호(예: 쉼표)를 사용해야 합니다.
-
정확성을 보장하기 위해 로봇 모델을 제작한 후 mastering_joints、axis_flip、base_z_offset 속성을 로봇 시뮬레이션 소프트웨어와 대조해야 합니다.
-
axis_flip 속성은 minlimits, maxlimits와 결합되며 필요한 경우 한 관절 각의 상한 및 하한의 부호를 반전하고 위치를 바꿔야 합니다.
-
mastering_joints 속성의 마지막 J6은 종종 무시되며 이 속성은 오일러 각에 영향을 미치므로 정확성을 점검하고 보장해야 합니다.
[robot]_profile.json 파라미터 파일을 작성하기
[robot]_profile.json 로봇의 템플릿 파일은 Mech-Viz의 설치 경로 resource/robot/profile_example.json에 위치하 사용자는 이 파일을 기반으로 새로운 로봇의 _profile.json 파일을 작성할 수 있습니다.
|
Solidworks를 사용하여 완전한 로봇 STL 모델을 만들기
모델을 SolidWorks로 도입하기
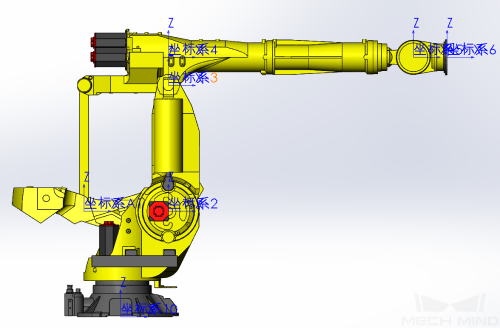
아래 그림과 같이 SolidWorks를 사용하여 미리 준비된 로봇 CAD 모델을 엽니다.

위 그림에서 왼쪽은 3D 소프트웨어에 표시된 로봇 모델이고 오른쪽은 조립할 때의 참조 그림입니다.
|
좌표계를 구축하기
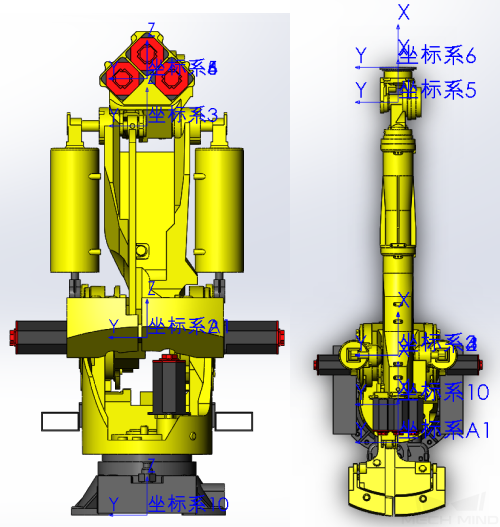
로봇 구성 내용을 참조하여 각 축의 좌표계를 구축합니다.
FANUC M-900iB/400L의 구성은 SphericalWrist_SixAxis이며, 로봇의 자세는 다음과 같아야 합니다: 1축은 초기 위치로 복원되고 2축은 수직으로 위쪽을 가리키며 3,4축은 수평으로 앞쪽을 가리키고 5축은 아래가 아닌 앞쪽 방향을 가리킵니다. 로봇 자세를 확인한 후 모든 부품을 고정시키는 것을 권장합니다.
로봇 각 관절의 STL 모델을 도출하기
로봇 모델을 도출할 때 장착체에서 다른 구성 요소의 표시를 숨겨 개별 도출하기를 용이하게 합니다.
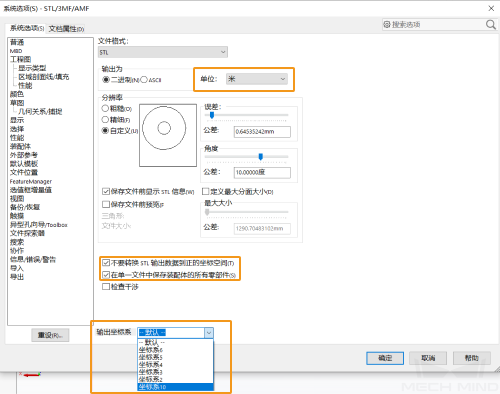
모델을 도출할 때 파일을 stl 파일로 저장하고 출력은 바이너리, 단위는 미터, 파일의 네이밍 규칙과 부위별로 선택해야 하는 좌표계는 로봇 구성 내용을 참조하십시오. 도출할 때의 다른 설정 사항은 아래 그림과 같습니다.
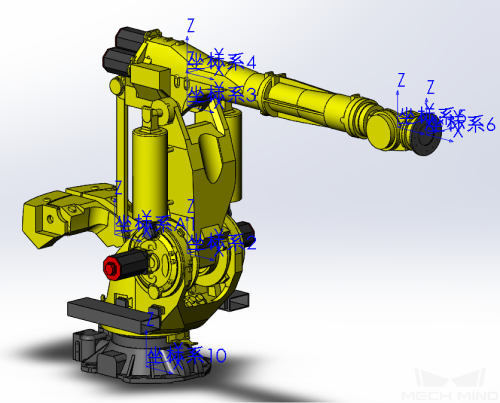
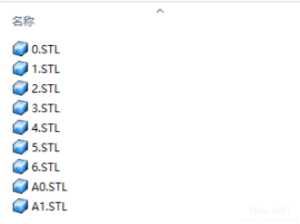
FANUC M-900iB/400L 로봇이 모두 저장된 후의 완전한 STL 모델 파일은 아래 그림과 같습니다.
이로써 로봇 모델의 제작 과정은 끝났습니다.
모델 파일을 Mech-Viz 소프트웨어로 도입하기
Mech-Viz 소프트웨어가 로봇 라이브러리를 저장하는 경로는 C:\Users\계정 이름\AppData\Roaming\Mmind\robot 폴더입니다.동일한 브랜드의 로봇은 로봇 브랜드의 이름으로 명명된 동일한 폴더에 저장됩니다. 각 로봇의 모든 파일은 브랜드 폴더 아래에 있는 로봇 모델에 의해 명명된 폴더에 있습니다.
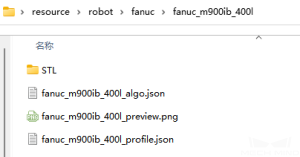
예를 들어, FANUC M900iB/280L 로봇의 모델 파일은 C:\Users\계정 이름\AppData\Roaming\Mmind\robot\fanuc\fanuc_m_900ib_280l 폴더에 있으며 폴더의 구조는 아래 그림과 같습니다.
-
STL: 모델 파일
-
fanuc_m900ib_280l_algo.json: 로봇 운동학 파라미터 파일
-
fanuc_m900ib_280l_preview.png: 로봇 이미지
-
fanuc_m900ib_280l_profile.json: 로봇 관련 설명 파라미터 파일
|
모든 파일을 해당 경로에 넣으면 로봇 모델 도입 과정이 완료됩니다. 도입된 로봇 모델은 Mech-Viz 소프트웨어의 로봇 라이브러리에서 선택될 수 있습니다.