로봇을 선택하기
이 부분에서는 로봇을 선택하는 방법에 대해 설명합니다.
-
Mech-Vision 툴 바에서 로봇 및 인터페이스 구성을 클릭합니다.
-
로봇을 선택하기.
-
목록에 있는 로봇을 선택하기
-
로봇 선택 드롭다운 상자를 클릭하고 목록에 있는 로봇을 선택한 다음 로봇 모델 선택을 클릭합니다.
-
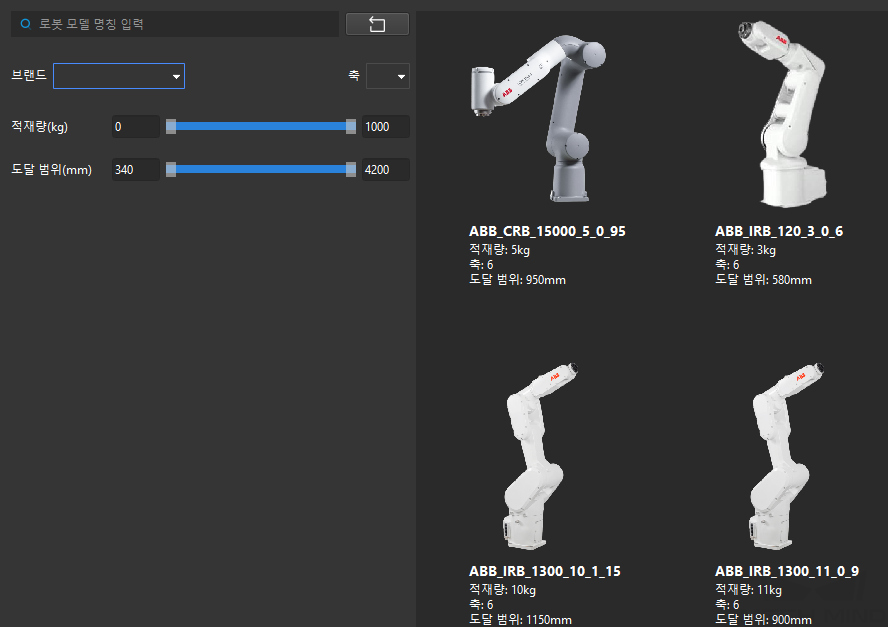
브랜드 뒤의 드롭다운 상자에서 로봇 브랜드를 선택하면 해당 브랜드의 모든 로봇이 오른쪽 창에 나타납니다.
-
축, 적재량, 도달 범위를 선택하여 로봇의 범위를 더 좁힙니다.
-
검색 상자에 로봇 브랜드 및 모델(영어로 대소문자 구분 안 함)을 입력하여 로봇을 필터링할 수 있습니다. 입력란의 내용을 지우려면
 버튼을 클릭하십시오.
버튼을 클릭하십시오.
로봇 라이브러리에 필요한 로봇이 없으면 이 창을 닫고 《로봇을 도입하기》 를 참조하여 작업한 후 여기서 작업을 수행합니다.
-
-
오른쪽에서 선택할 로봇 위에 마우스를 올리면 회색 테두리와 선택 버튼이 표시되며 버튼을 클릭하고 창을 닫습니다.
-
다음을 클릭하여 통신 구성 인터페이스로 들어갑니다.
-
-
다른 로봇 선택(예: 트러스 로봇)
-
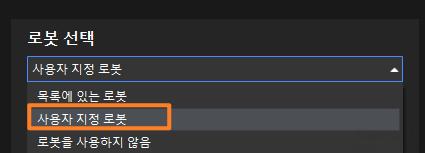
로봇 선택 드롭다운 상자를 클릭하고 사용자 지정 로봇을 선택합니다.
-
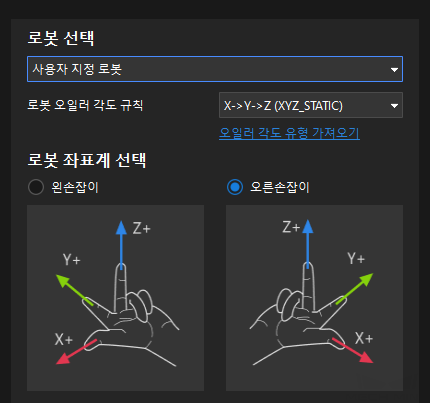
로봇의 오일러 각 유형을 선택합니다.
-
로봇 좌표계를 선택합니다.
-
다음을 클릭하여 통신 구성 인터페이스로 들어갑니다.
-
-
로봇을 사용하지 않도록 선택(로봇 시나리오가 없음, 예를 들면 측량)
-
로봇 선택 드롭다운 상자를 클릭하고 로봇을 사용하지 않기를 선택합니다.
-
다음을 클릭하여 Adapter 인터페이스 구성 화면으로 들어갑니다.
-
-
|
로봇을 사용하지 않기를 선택한 후 통신 방식은 Adapter 통신만 선택할 수 있습니다. |