Mech-Vision만 사용하여 비전 포즈를 전송하기
이 부분에서는 Mech-Vision만 사용하여 비전 포즈를 전송하는 Adapter 샘플 프로그램에 대해 자세히 소개하겠습니다.
배경 소개
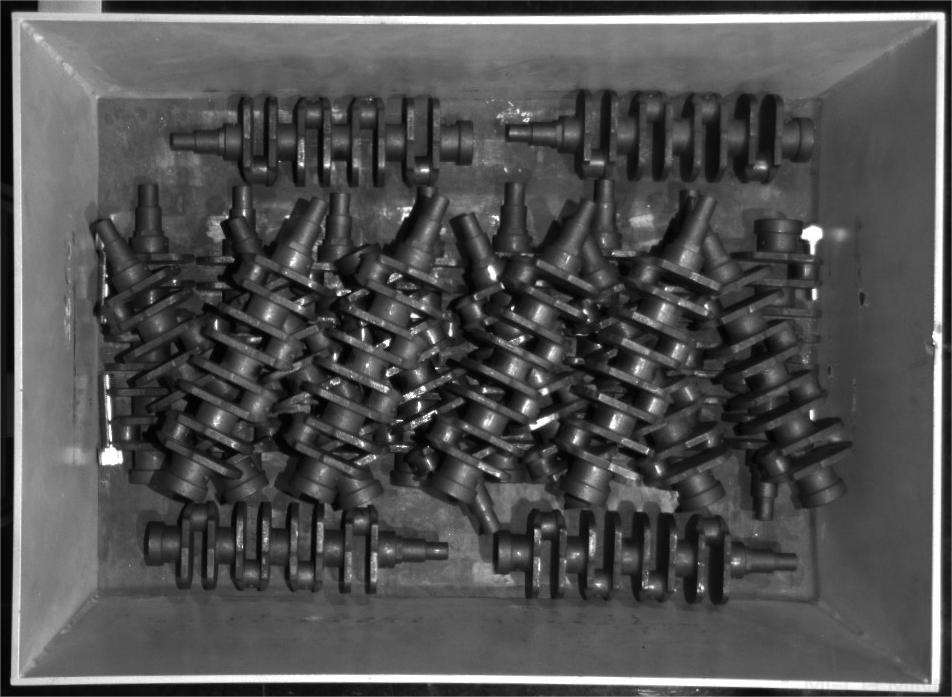
이 샘플은 크랭크 축 텐딩의 응용 시나리오에 관한 것입니다. 카메라는 빈 위의 브래킷에 고정되며 Mech-Vision은 이미지를 캡처하고 피킹할 수 있는 작업물의 좌표를 출력해 로봇 측에 보냅니다.
이 샘플은 Mech-Vision의 내장 샘플 프로젝트 “대형 비 평면 부품”()을 사용합니다.
이 프로젝트는 3D 모델 매칭 알고리즘을 사용하며 서로 다른 공작물에 대해 서로 다른 모델 파일과 픽 포인트를 설정해야 합니다. 따라서 Mech-Vision에서 파라미터 레시피를 설정해야 하고 레시피 번호(공작물 번호)는 로봇 측에서 이미지 캡처 명령을 보낼 때 설정합니다.
통신 방안
로봇과 Mech-Mind 비전 소프트웨어 시스템을 설치하는 IPC는 TCP/IP Socket 프로토콜을 사용하여 통신하며 통신 형식은 ASCII 문자열이며 데이터 구분 기호는 영어 쉼표(,)를 사용합니다.
그 중 비전 시스템은 통신 서버로, 로봇은 클라이언트로 사용됩니다.
통신 프로세스는 아래 그림과 같습니다.
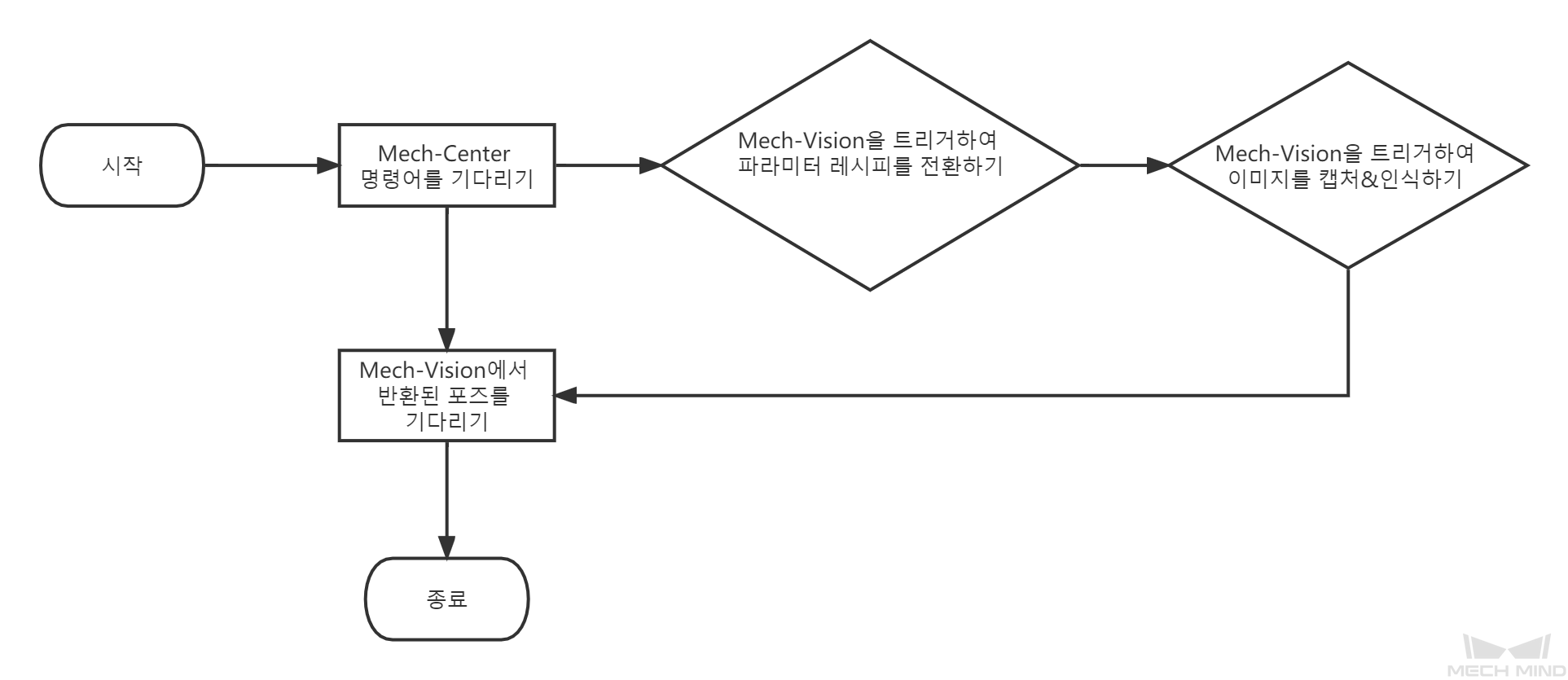
통신 프로세스의 상세한 설명은 아래와 같습니다:
-
Mech-Center는 로봇이 이미지 캡처 명령 `P`와 레시피 번호를 보낼 때까지 기다립니다.
-
Mech-Center는 Mech-Vision을 트리거하여 파라미터 레시피를 전환합니다.
-
Mech-Center는 Mech-Vision을 트리거하여 이미지를 캡처합니다.
-
이미지 캡처와 물체 인식이 성공하면 Mech-Vision은 상태 코드와 비전 포즈를 Mech-Center로 전송합니다.
-
Mech-Center는 상태 코드와 비전 포즈를 로봇으로 전송합니다.
|
로봇 피킹를 용이하게 하기 위해 Mech-Center는 피킹할 작업물의 포즈를 로봇 TCP 포즈로 변환합니다. |
통신 메시지 형식
자세한 통신 메시지 형식은 아래와 같습니다.
| 요청 명령 | 공작물 번호 | |
|---|---|---|
전송(로봇→ IPC) |
|
정수, 값 범위: 1~100 |
상태 코드 |
비전 포즈(TCP 좌표) |
|
수신(IPC → 로봇) |
정수, 값 범위: 0~4 (0-정상 인식, 1-잘못된 명령 코드, 2-Vision 프로젝트가 등록되지 않음, 3-포즈가 없음, 4-포인트 클라우드가 없음) |
x,y,z,a,b,c 형식의 쉼표(,)로 구분된 6개의 부동 소수점 데이터입니다. |
|
응답 메시지의 길이는 정해진 것입니다. 응답 메시지의 상태 코드가 비정상 코드(1~4)인 경우 비전 포인트 데이터는 0으로 채워집니다. |
통신 메시지 예시
요청 메시지
P,1정상적인 응답 메시지
0,1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517|
이 샘플에서 Mech-Vision은 정상적으로 인식하며 반환된 TCP 좌표는 1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517입니다. |
비정상적인 응답 메시지: 잘못된 명령 코드
1,0,0,0,0,0,0비정상 응답 메시지: 비전 프로젝트가 등록되지 않음
2,0,0,0,0,0,0비정상적인 응답 메시지: 포즈가 없음
3,0,0,0,0,0,0비정상적인 응답 메시지: 포인트 클라우드가 없음
4,0,0,0,0,0,0프로그래밍 맥락
이 샘플은 프로젝트 목표를 달성하기 위해 다음 그림과 같은 맥락에 따라 Adapter 프로그램을 작성합니다.
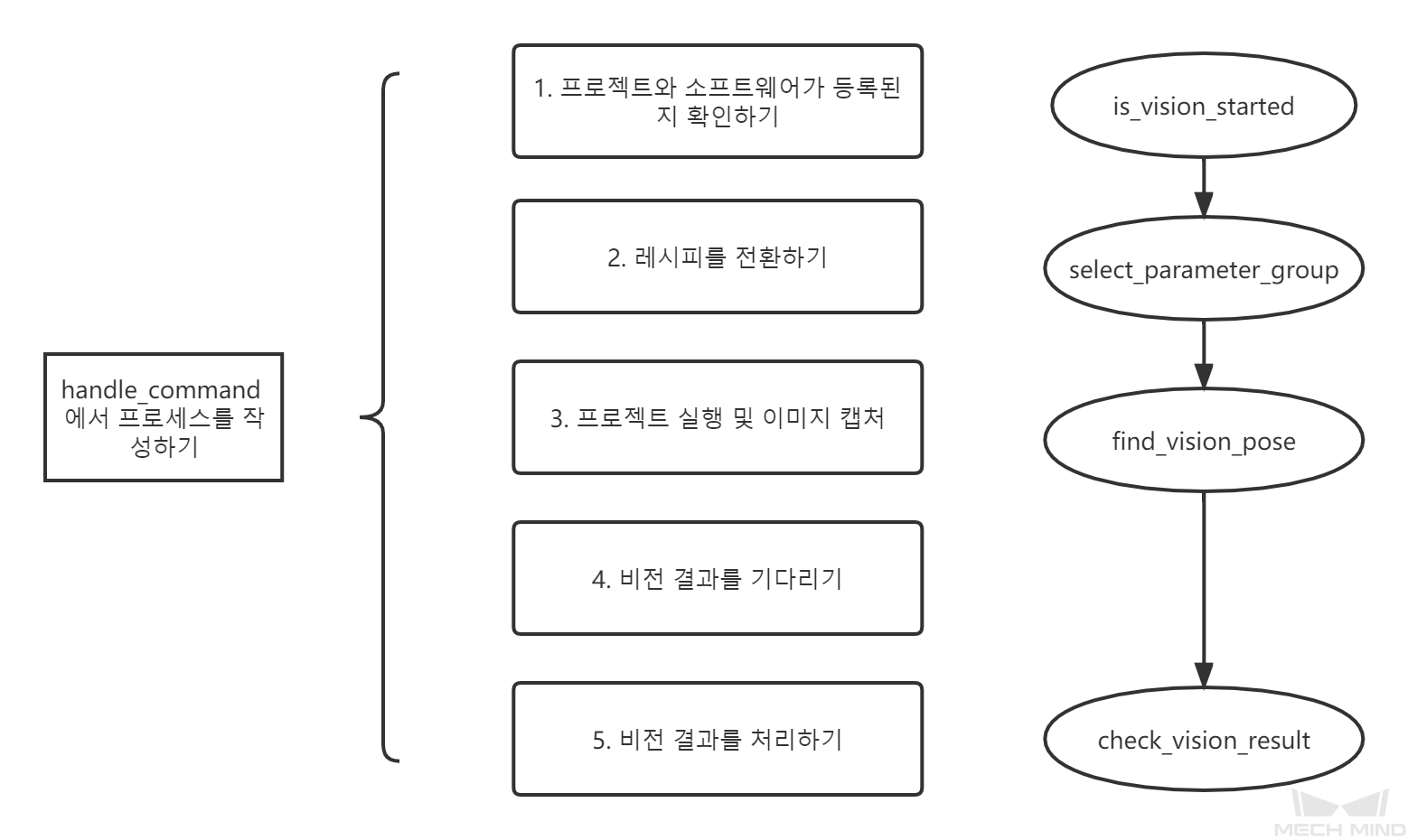
위의 그림은 샘플 프로그램의 메시지 처리 논리만을 나열한 것입니다. 다음으로 샘플 프로그램에 대해 자세히 설명하겠습니다.
샘플 프로그램 상세 소개
|
Adpater 샘플 프로그램을 다운로드하십시오. |
Python 패키지를 가져오기
Adapter 프로그램이 의존하는 모든 모듈을 도입합니다.
import json
import logging
import math
import sys
from time import sleep
import os
sys.path.append(os.path.abspath(os.path.join(os.path.dirname(__file__), "..", "..")))
from transforms3d import euler
from interface.adapter import TcpServerAdapter, TcpClientAdapter
from util.transforms import object2tcp클래스 정의
“TcpServerAdapter” 상위 클래스를 상속하는 “TestAdapter” 하위 클래스를 정의하십시오.
class TestAdapter(TcpServerAdapter):
vision_project_name = "Large_Non_Planar_Workpieces"
# vision_project_name = 'Vis-2StationR7-WorkobjectRecognition-L1'
is_force_real_run = True
service_name = "test Adapter"
def __init__(self, address):
super().__init__(address)
self.robot_service = None
self.set_recv_size(1024)|
이 샘플은 Adapter 프로그램을 TCP/IP 소켓 통신용 서버로 정의합니다. |
명령 수신 및 논리 처리 설정
수신을 받기 위한 처리 논리를 설정합니다(이미지 캡처 및 파라미터 레시피 포함).
# Receive command _create_received_section
def handle_command(self, cmds):
photo_cmd, *extra_cmds = cmds.decode().split(',')
recipe = extra_cmds[0]
# Check command validity _check_cmd_validity_section
if photo_cmd != 'P':
self.msg_signal.emit(logging.ERROR, 'Illegal command: {}'.format(photo_cmd))
self.send(('1' + '' + '').encode())
return
# Check whether vision is registered _check_vision_service_section
if not self.is_vision_started():
self.msg_signal.emit(logging.ERROR, 'Vision not registered: {}'.format(self.vision_project_name))
self.send(('2' + '' + '').encode())
return
# Change TODO parameter "extra_cmds" according to actual conditions
sleep(0.1) # wait for a cycle of getting in Vision
# _check_vision_result_function_section
try:
result = self.select_parameter_group(self.vision_project_name, int(recipe) - 1)
if result:
result = result.decode()
if result.startswith("CV-E0401"):
self.send(('5' + '' + '').encode())
return
elif result.startswith("CV-E0403"):
self.send(('5' + '' + '').encode())
return
raise RuntimeError(result)
except Exception as e:
logging.exception('Exception happened when switching model: {}'.format(e))
self.send(('5' + '' + '').encode())
return
self.show_custom_message(logging.INFO, "Switched model for project successfully")
self.msg_signal.emit(logging.WARNING, 'Started capturing image')
try:
self.check_vision_result(json.loads(self.find_vision_pose().decode()))
except Exception as e:
self.msg_signal.emit(logging.ERROR, 'Calling project timed out. Please check whether the project is correct: {}'.format(e))
self.send(('2' + '' + '').encode())|
“handle_command” 함수는 TCP/IP 소켓 서버가 수신한 메시지에 대한 처리 인포트로 사용됩니다. |
Mech-Vision 비전 결과 체크를 정의하기
Mech-Vision에서 출력한 비전 결과를 체크하도록 Adapter를 설정합니다.
# Check vision results
def check_vision_result(self, vision_result, at=None):
noCloudInRoi = vision_result.get('noCloudInRoi', True)
if noCloudInRoi:
self.msg_signal.emit(logging.ERROR, 'No point clouds')
self.send(('4' + '' + '').encode())
return
poses = vision_result.get('poses')
labels = vision_result.get('labels')
if not poses or not poses[0]:
self.msg_signal.emit(logging.ERROR, 'No visual points')
self.send(('3' + '' + '').encode())
return
self.send(self.pack_pose(poses, labels).encode())
self.msg_signal.emit(logging.INFO, 'Sent TCP successfully')포즈의 출력 형식을 설정하기
비전 포즈의 외부로 출력하는 형식을 설정합니다.
# Pack pose _pack_pose_section
def pack_pose(self, poses, labels, at=None):
pack_count = min(len(poses), 1)
msg_body = ''
for i in range(pack_count):
pose = poses[i]
object2tcp(pose)
t = [p * 1000 for p in pose[:3]]
r = [math.degrees(p) for p in euler.quat2euler(pose[3:], 'rzyx')]
p = t + r
self.msg_signal.emit(logging.INFO, 'Sent pose: {}'.format(p))
msg_body += ('{:.4f},' * (len(p) - 1) + '{:.4f}').format(*p)
if i != (pack_count - 1):
msg_body += ','
return '{},'.format(0) + msg_body + ''Adapter를 닫는 작업을 정의하기
Adapter를 닫는 방법을 정의합니다.
def close(self):
super().close()