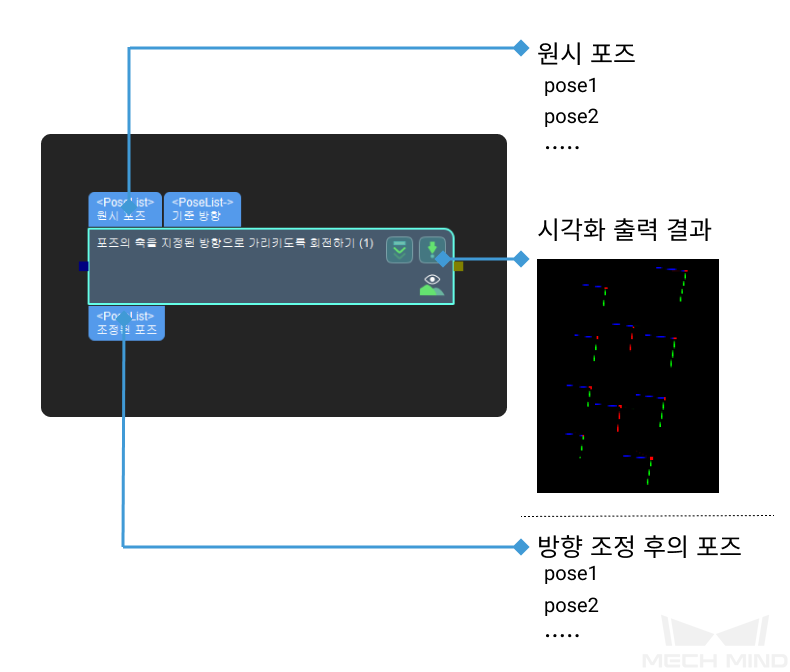
포즈의 축을 지정된 방향으로 가리키도록 회전하기
응용 시나리오
일반적으로 포즈 방향을 조정해야 하는 다양한 시나리오에서 사용됩니다.
이 스텝은 구 버전입니다. 물체의 대칭성에 따라 포즈를 회전해야 하는 경우(이 스텝에서 "보정 방법" 파라미터를 "ROTATION"으로 설정하는 것에 해당) 새 버전의 스텝을 사용하여 회전하십시오. 새 버전 스텝 지정된 방향으로 포즈를 회전하기(대칭성 제약)과 스텝 3D 벡터를 빠르게 만들기를 함께 사용합니다.
파라미터 설명
시각화 설정
- 포즈 시각화 설정
-
기본값: 출력 포즈만 표시하기
값 리스트: 입력 포즈만 표시하기, 출력 포즈만 표시하기, 입력 및 출력 포즈를 모두 표시하기
설명: 처리 후의 포즈만 표시하기(기본값), 처리 전의 포즈만 표시하기, 처리하기 전/후의 포즈를 모두 표시하기
방법 선택
- 보정 방법
-
HARD_RECTIFY:기본값 두 번째 입력(기준 포즈)이 있고 useFirstRefPose가 체크되어 있으면 첫 번째 기준 포즈에 해당하는 축 유형의 방향이 기준 방향이 되고, 그렇지 않으면 모든 기준 포즈에 해당하는 축 유형이 기준 방향으로 사용됩니다. 기준 포즈 입력이 없으면 reference Dir이 기준 방향을 결정합니다.
ROTATION: 물체의 대칭성에 따라 보정할 회전축의 방향이 지정된 기준축의 방향과 대체로 일치하도록 대칭 각도를 설정합니다.
축 설정
- 조정될 축
-
설명: 조정할 회전축입니다.
값 리스트: X;Y;Z(기본값)
기준 방향
- X 축
-
기본값: 0
설명: 기준 축 X의 방향 벡터
- Y 축
-
기본값: 0
설명: 기준 축 Y의 방향 벡터
- Z 축
-
기본값: 1
설명: 기준 축 Z의 방향 벡터