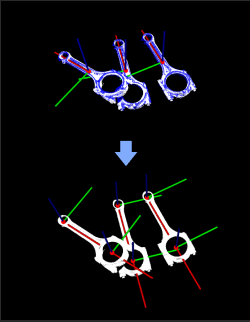
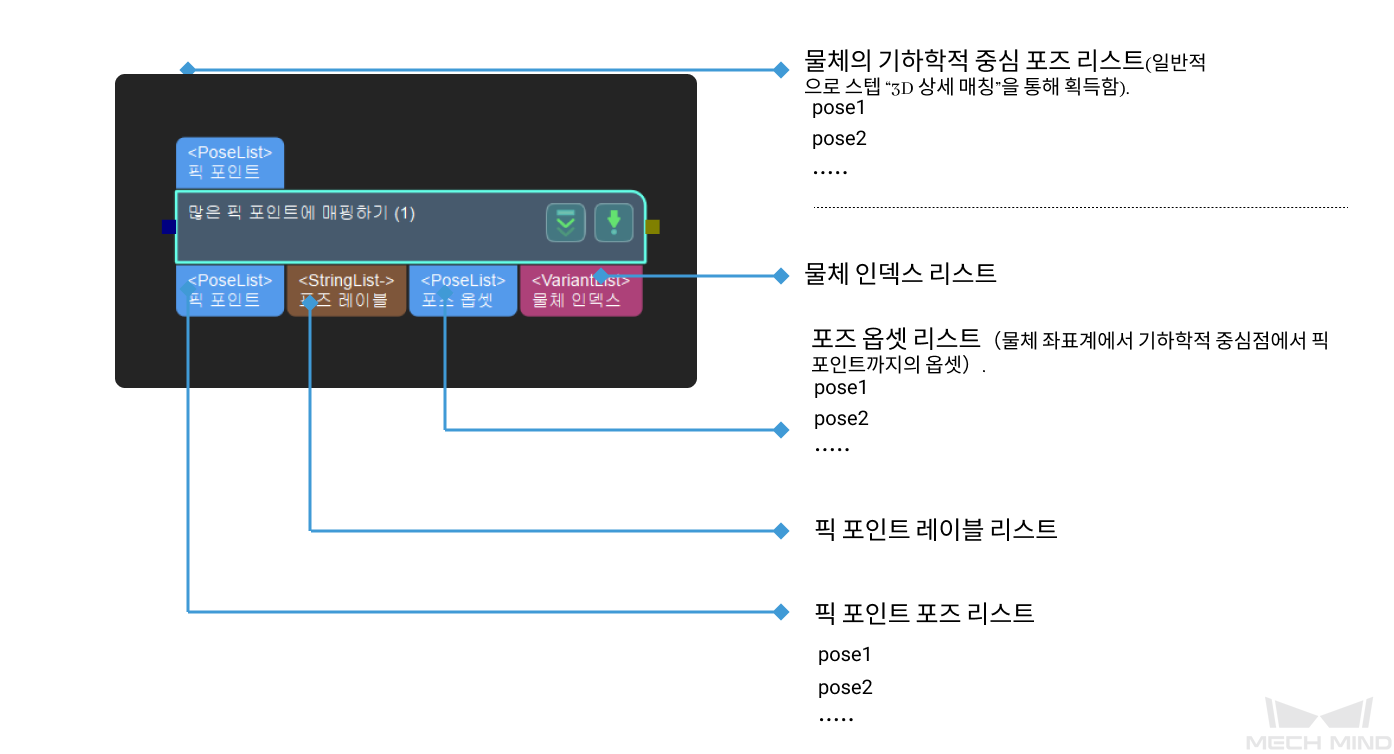
여러 개의 픽 포인트에 매핑하기
파라미터 설명
포즈 파일의 경로
- 기하학적 중심점 파일
-
템플릿에서 물체 기하학적 중심점의 포즈
조절 설명: 기하학적 중심점 파일을 저장하는 절대 경로나 상대 경로.
- 배치 포인트 포즈 파일
-
물체 배치 포인트의 포즈
조절 설명: 배치 포인트 파일을 저장하는 절대 경로나 상대 경로.
- 픽 포인트 포즈 파일
-
템플릿에서 물체 픽 포인트의 포즈
조절 설명: 픽 포인트 파일을 저장하는 절대 경로나 상대 경로.
레이블 가져오기(선택 사항)
- 포즈 레이블 파일
-
픽 포인트 파일과 대응하는 레이블 파일
조절 설명: 레이블 파일을 저장하는 절대 경로나 상대 경로.