キャリブレーションの操作手順
以下では、TMロボットが標準インターフェースを介してMech-Mindビジョンシステムと通信する際に、自動キャリブレーションを完了する方法について説明します。
| キャリブレーションを実行する前に、以下のことを確認してください。 |
-
開始する前に 標準インターフェースの通信設定 を参照してロボットプログラムの読み込みを完了しました。
-
ロボットは手動モードであり、Manualランプは常に点灯しています。自動モードの場合は、ロボット操縦桿の
M/Aを長押しして切り替えます。
キャリブレーションプログラムの読み込み
-
ロボット制御ソフトウェアを起動し、
 をクリックし、左側の Project をクリックします。すると、下図のような画面が表示されます。
をクリックし、左側の Project をクリックします。すると、下図のような画面が表示されます。
-
 をクリックし、表示される画面でmm_calibarationを選択して OK をクリックします。
をクリックし、表示される画面でmm_calibarationを選択して OK をクリックします。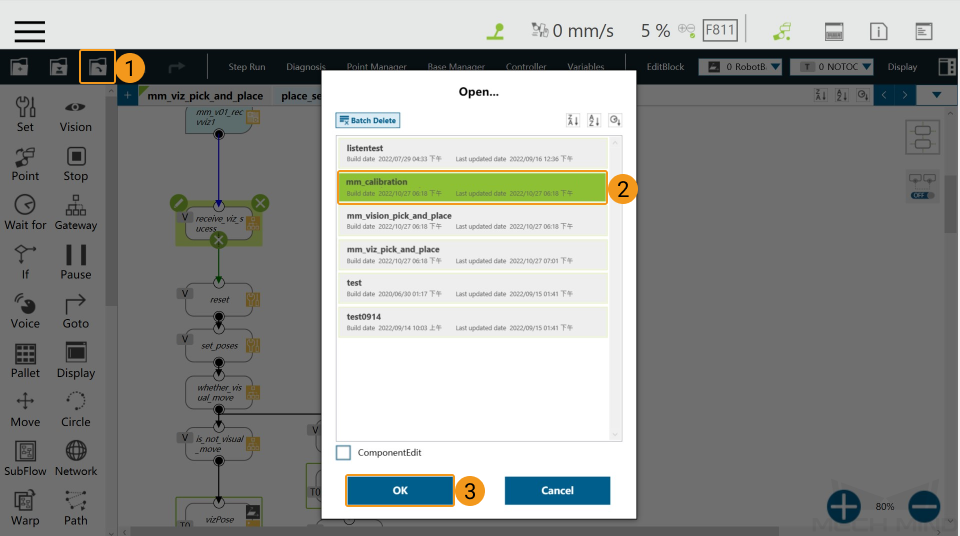
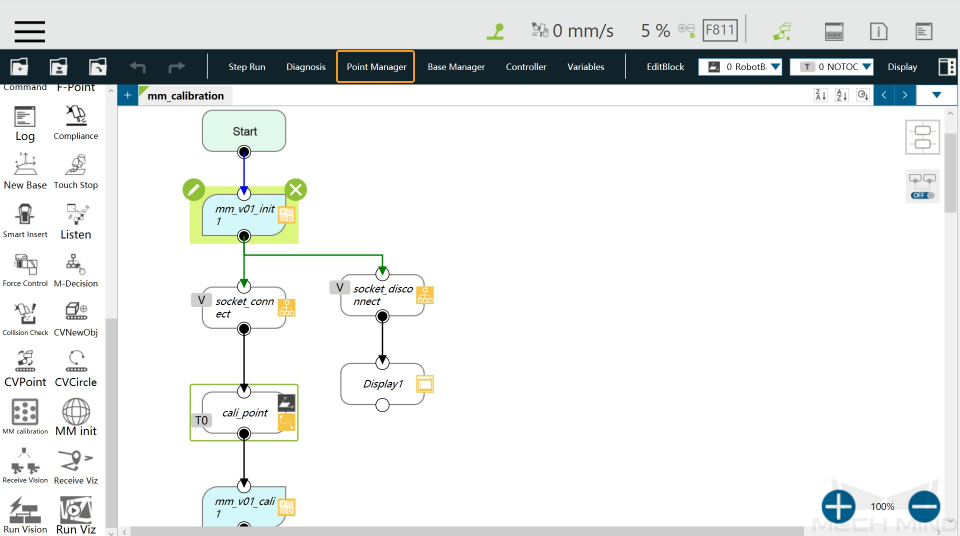
キャリブレーションの初期位置を設定
-
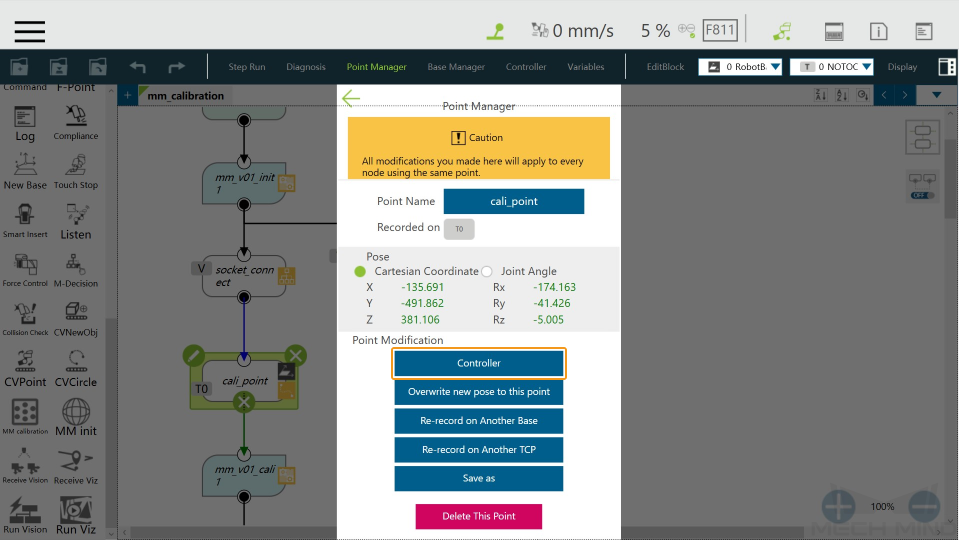
Point Manager をクリックします。
-
表示される画面で
 をクリックします。
をクリックします。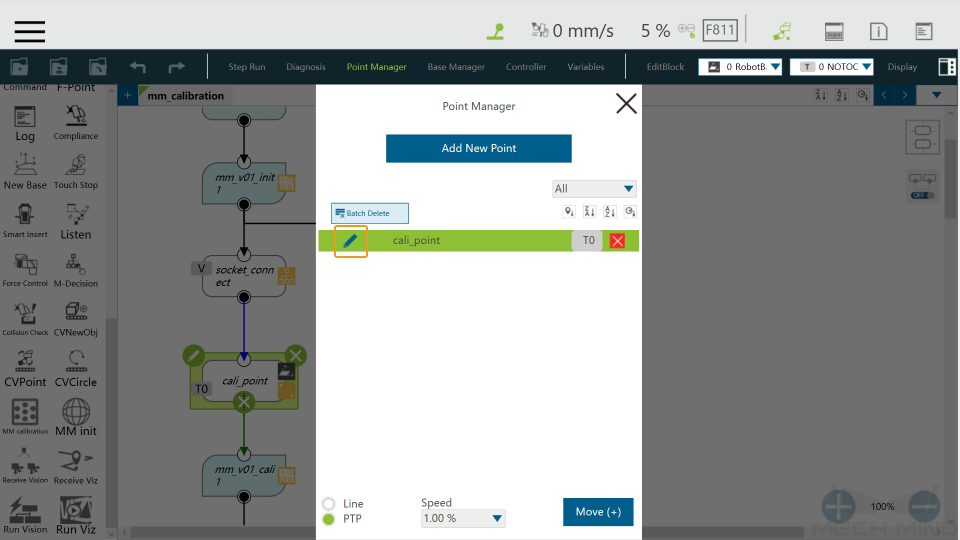
-
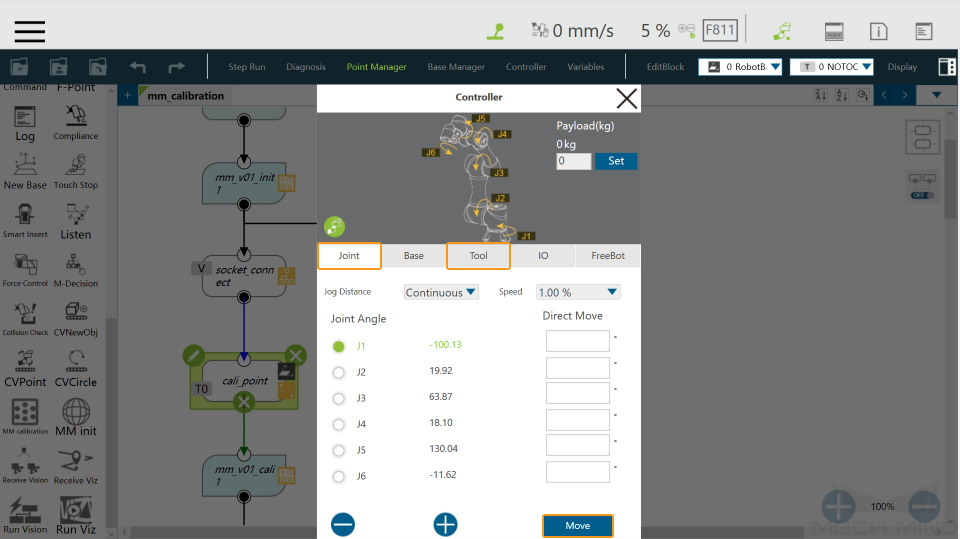
Controller をクリックします。
-
Joint または Tool 画面で、ロボットの位置姿勢を設定します。設定後、 Move をクリックします。
|
このポイントはハンドアイキャリブレーションの最初の撮影ポイントなので、キャリブレーションボードがカメラの視野中心に配置されていることが必要です。 |
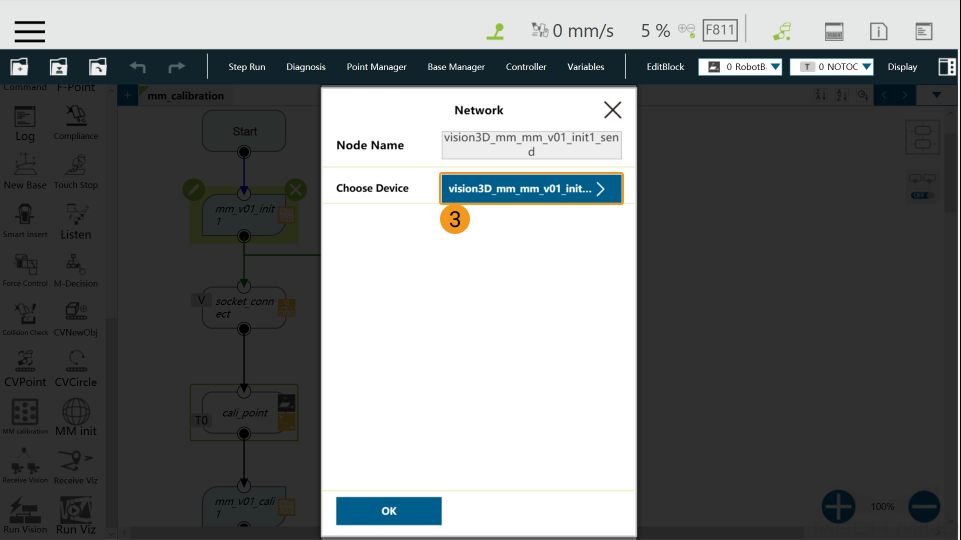
接続するIPCのIPアドレスを設定
-
initコンポーネントの左上にある
 をクリックします。
をクリックします。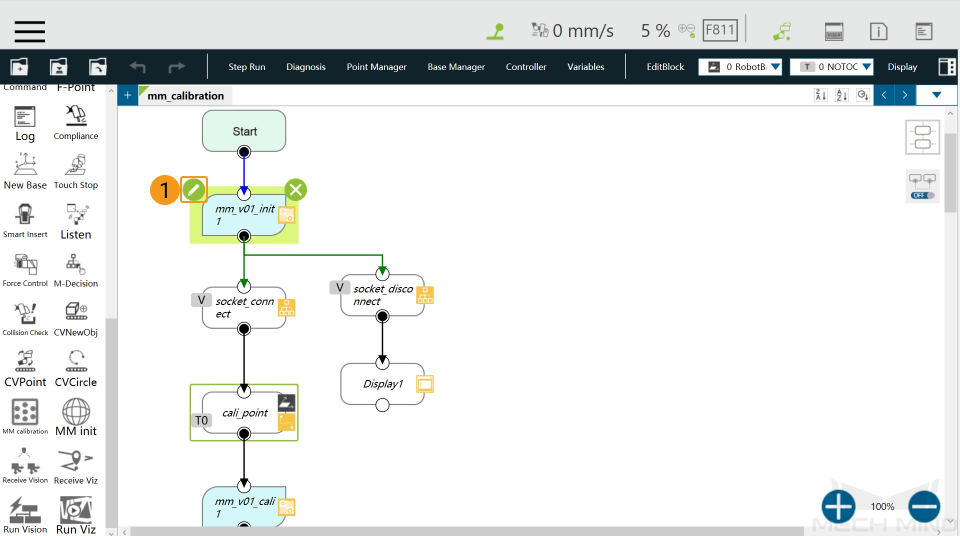
-
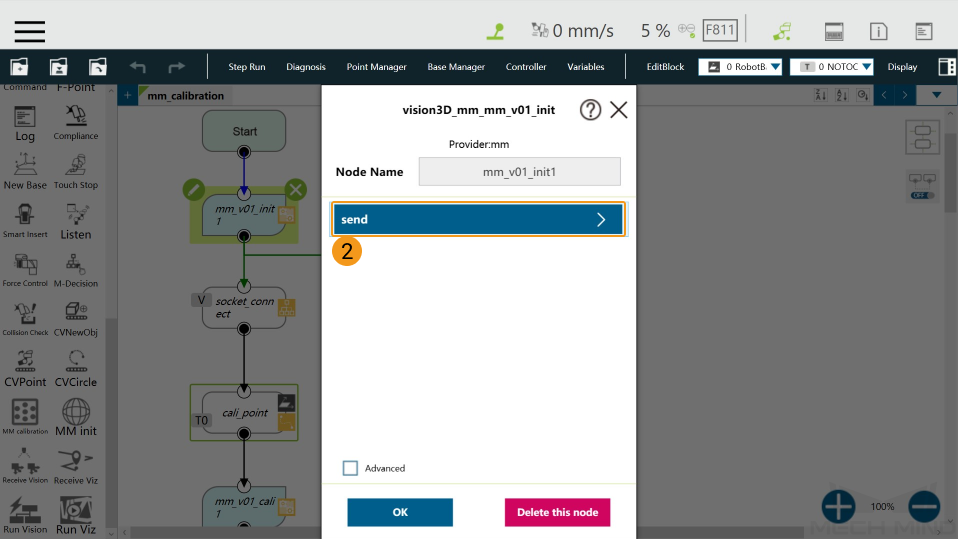
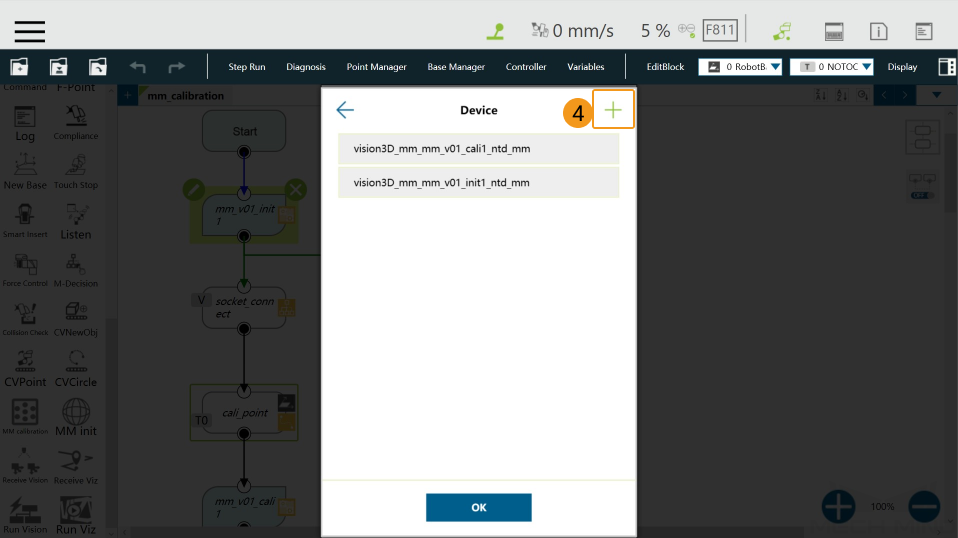
下図のようにマークされた箇所を順番にクリックします。
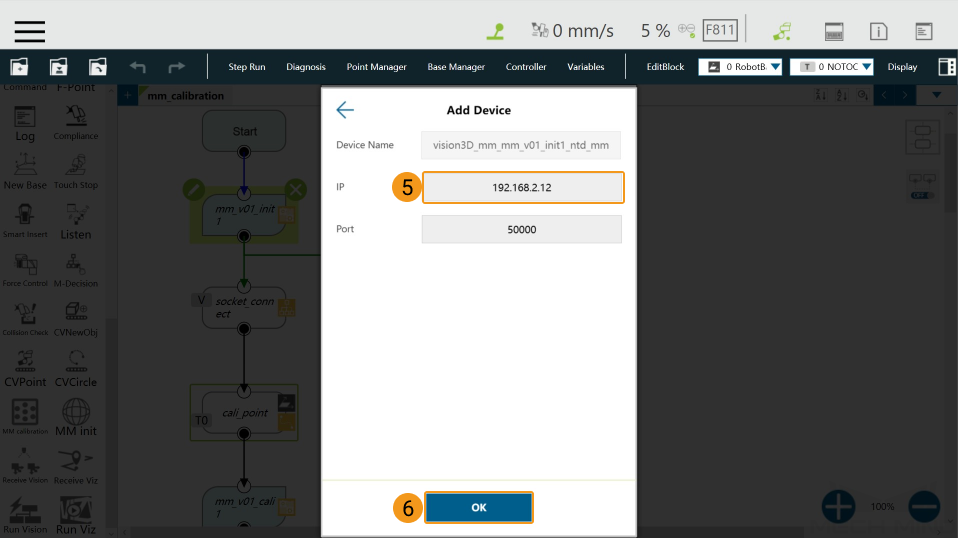
-
ロボットのLANポートに接続されているIPCのIPアドレスを、ネットワークアドレスに入力したら、 OK をクリックします。
キャリブレーションプログラムを実行
-
手動モード(Manualは常に点灯しています)で、操縦桿の
Runキーを押してキャリブレーションプログラムを実行します。
-
Mech-Visionのログバーの コンソール タブに、「キャリブレーションプロセスに入ります。Mech-Visionでキャリブレーションを開始してください」と表示されたことを確認します。
Mech-Visionでキャリブレーションを実行
-
Mech-Visionを起動し、 カメラキャリブレーション(標準モード) をクリックするか、またはメニューバーの を順番にクリックしてキャリブレーションツールを起動します。
-
カメラの取り付け方式に応じて、ソフトウェアの指示に従って残りの操作を行います。
-
カメラの取り付け方式はEye to handの場合、 自動キャリブレーション(Eye to hand) をご参照ください。
-
カメラの取り付け方式はEye in handの場合、 自動キャリブレーション(Eye in hand) をご参照ください。
-
| ロボットが60秒以内に次のキャリブレーションポイントに到達しない場合、Mech-Visionはタイムアウトエラーが発生します。この場合、ティーチペンダントでキャリブレーションプログラムを再度選択して再実行し、Mech-Visionでキャリブレーションを再実行する必要があります。 |