ロボットの基本操作
以下では、川崎ロボットの基本操作について説明します。
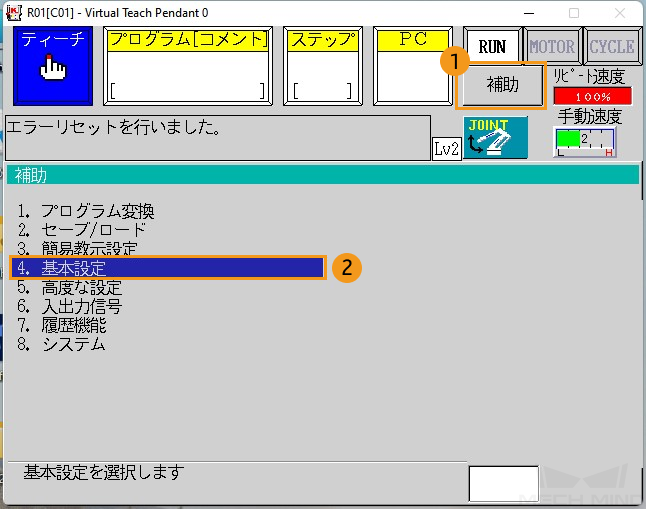
初期位置を設定
-
を順番にクリックします。
-
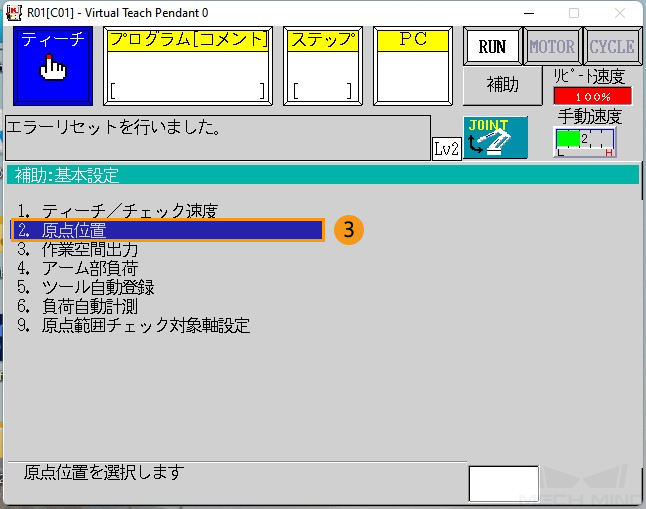
原点位置 をクリックします。
-
位置入力 にチェックを入れ、ロボットの初期位置に各関節の角度を設定します。設定完了後、
登録ボタンをクリックし、下部に「設定完了」のメッセージが表示されます。
また、手動でロボット実機を初期位置に移動することでティーチングすることもできます。ティーチング完了後、 現位置 にチェックを入れ、 登録 ボタンをクリックして確認します。
ロボットのTCPを設定
-
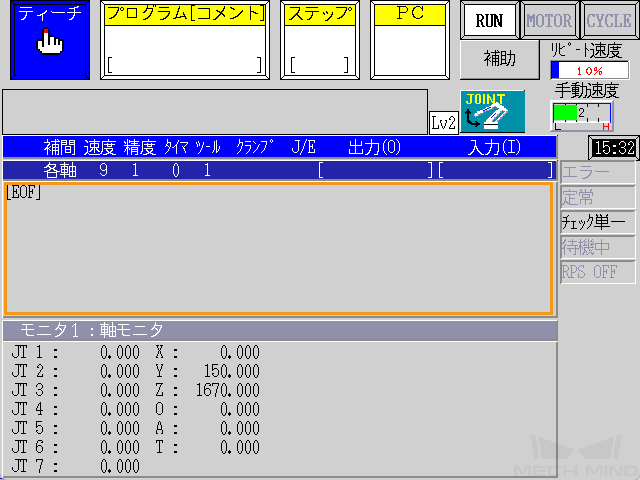
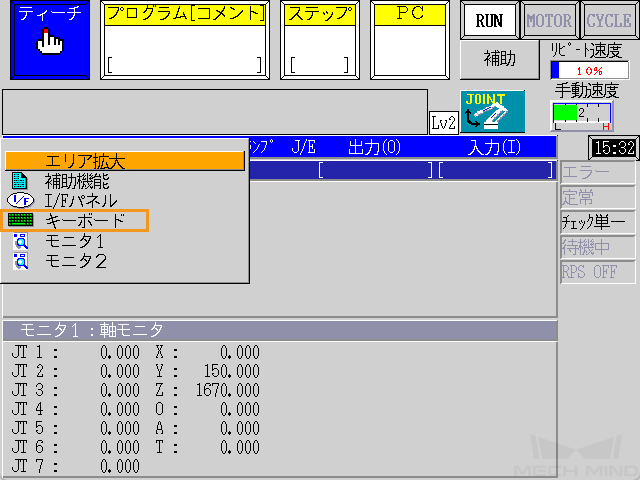
ティーチモードで、画面中央の空白領域をクリックします。
-
ポップアップするドロップダウンリストで、 キーボード をクリックします。
-
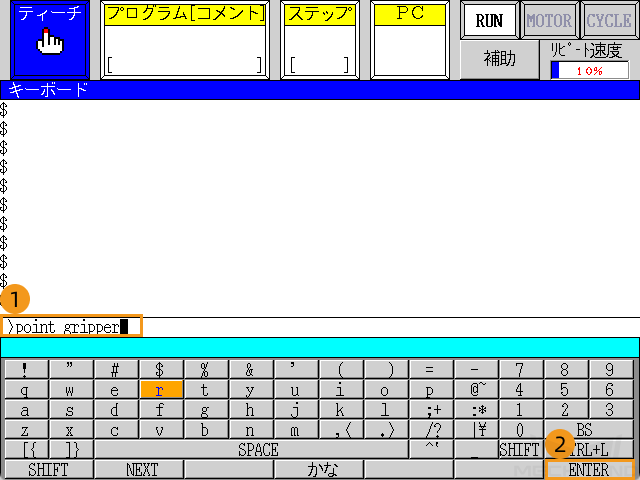
キーボードで point gripper を入力し、 ENTER をクリックします。
-
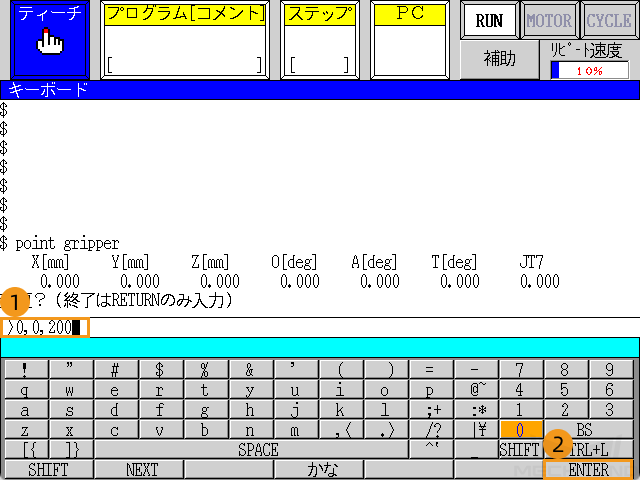
キーボードでTCPの位置姿勢データを入力します。例えば、ここでは 0,0,200 を入力し、 ENTER をクリックします。
-
もう一度 ENTER をクリックし、
Rをクリックして戻ります。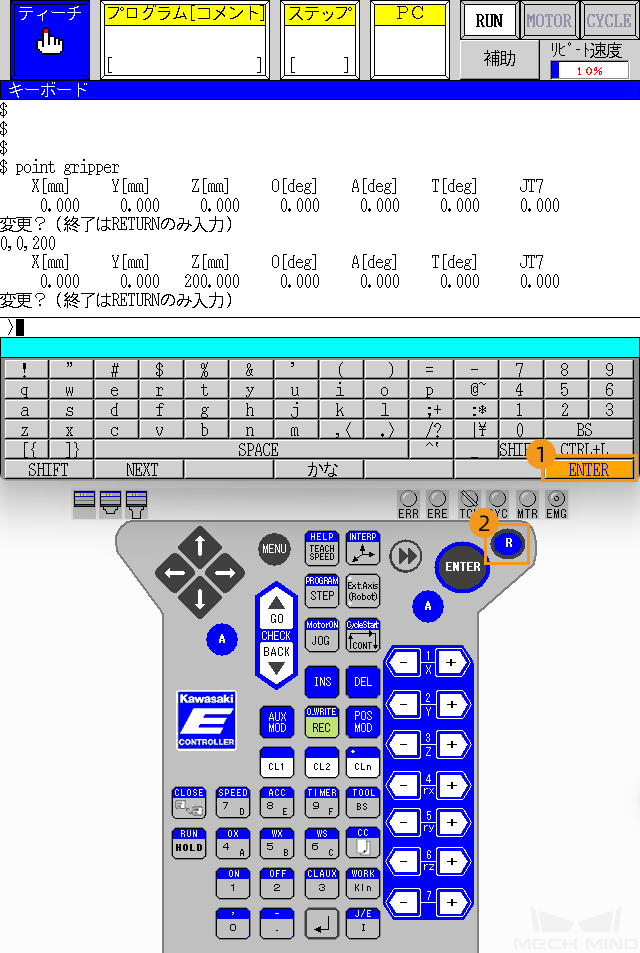
ティーチング位置姿勢データを設定
| 下記の操作を実行する前に、 Vizとの通信プログラムの読み込み を完了させる必要があります。 |
ここでは Mech-Visionからビジョン結果を取得 するためのサンプルプログラム内の31行目の lmove waypoint[1] を例として、ティーチング位置姿勢データを設定する方法について説明します。
-
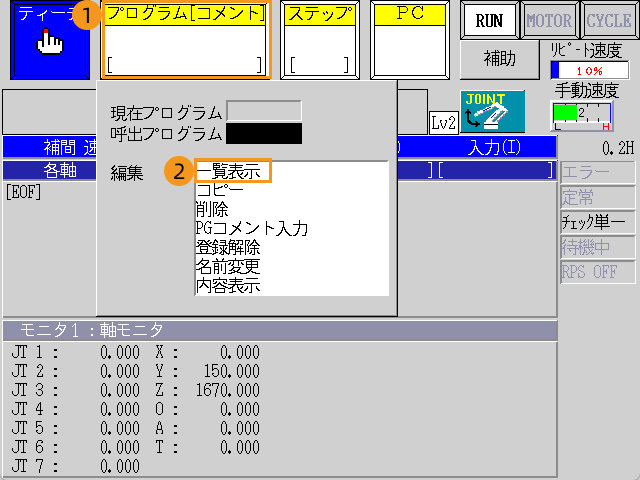
ティーチングモードで、 プログラム ウィンドウをクリックし、 一覧表示 をクリックします。
-
次のページ をクリックし、一覧表示から vision_sample_1 を検索してチェックを入れ、ティーチングペンダントの
登録を押します。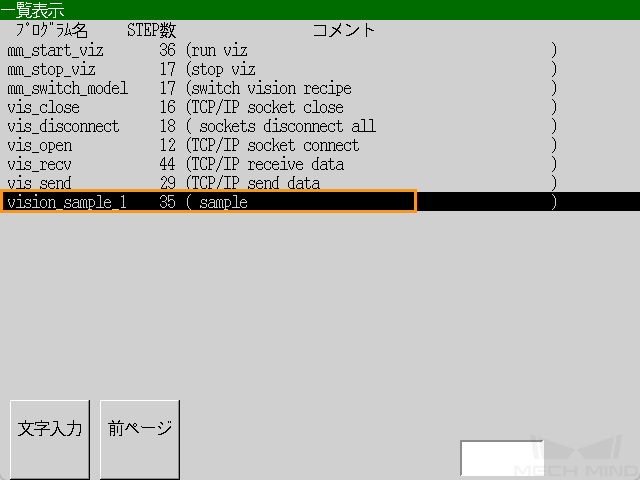
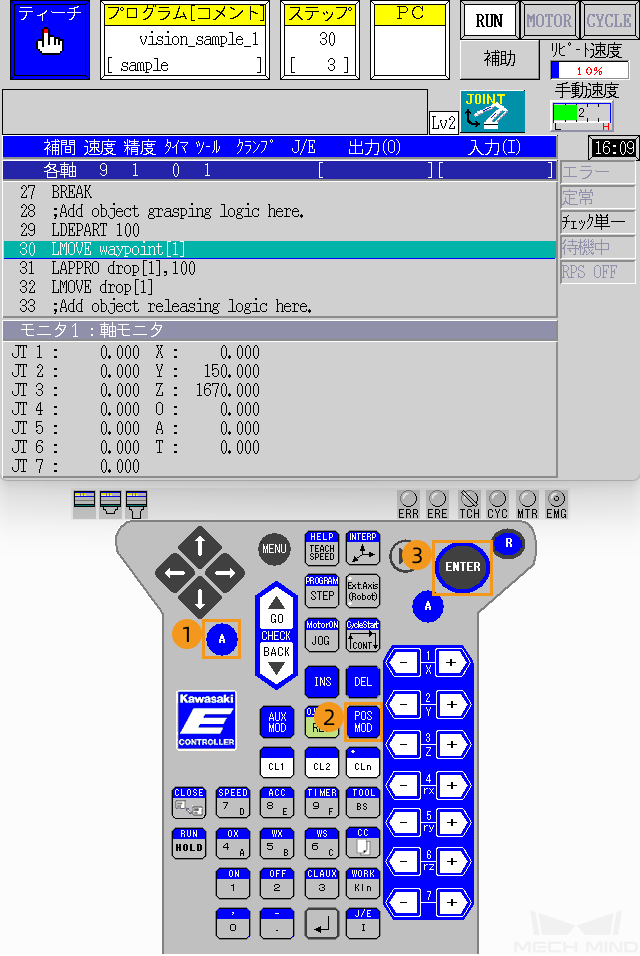
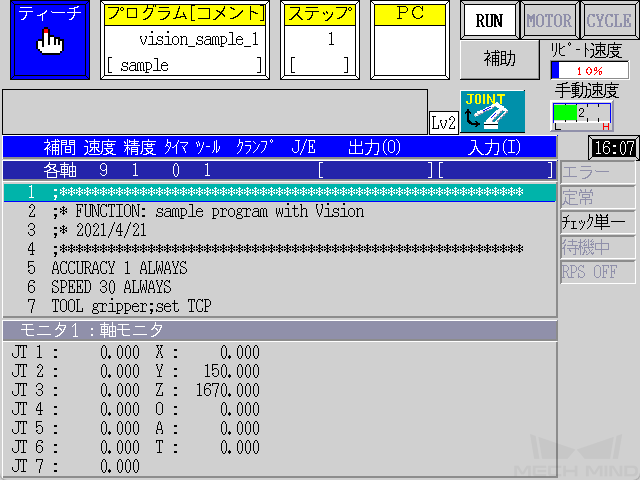
フォアグラウンドプログラムが追加された後、下図のように示します。
-
30行目がハイライト状態になるために、 ステップ をクリックし、 呼出ステップ でキーボードから30を入力し、
登録ボタンを押します。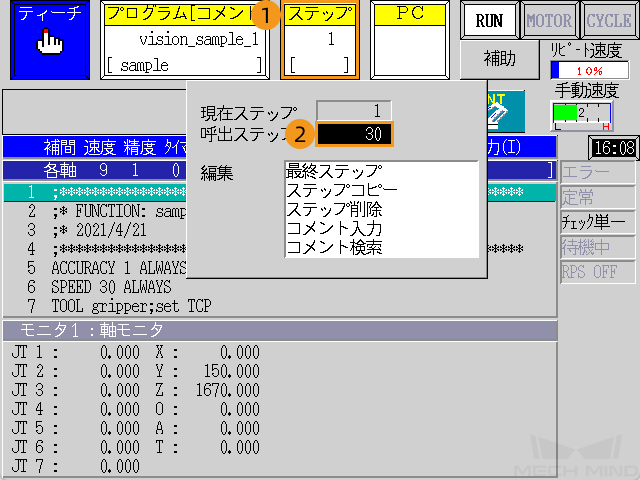
-
手動でロボット実機をティーチング位置に移動させ、
A+POS MODを押した後、登録を押して確認します。ここのティーチング位置の位置姿勢データがwaypoint[1]の値になります。