自動キャリブレーション
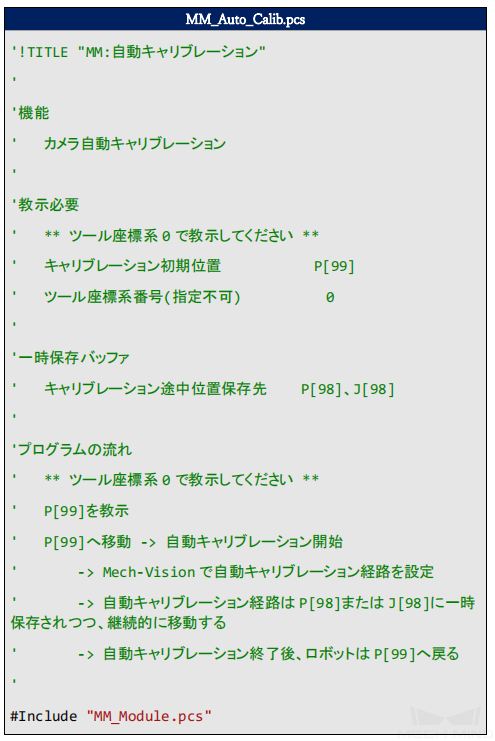
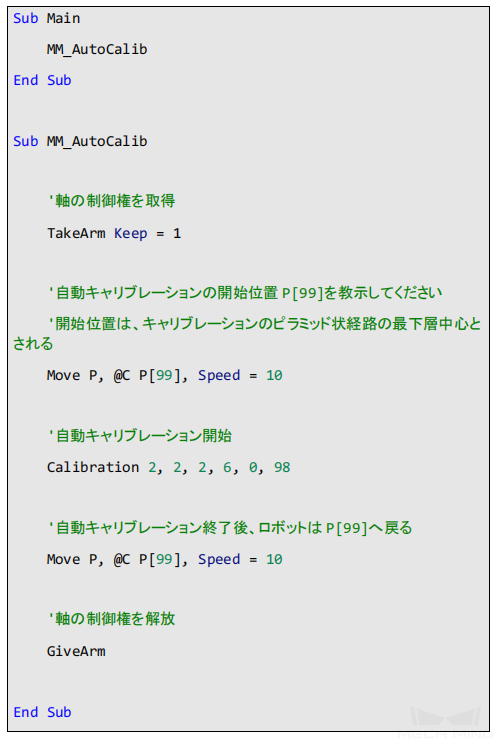
自動キャリブレーションは、プログラム MM_Auto_Calib.pcs で行います。
-
事前にキャリブレーションボードを正しく取り付けてください。その後、Mech-Vision のキャリブレーション画面を開き、接続準備を行います。自動キャリブレーション で紹介したコマンド Calibration が実行された後、Mech-Vision にて手順に従って進めます。詳細は、以下の内容を参照してください。
-
注意点
-
キャリブレーションの経路設定を間違えると、ロボットが予期しない経路点に移動することがあります。初めは必ず速度を低く設定してください。
-
キャリブレーション初期位置(P[99])を最初に教示する必要があります。ツール座標系 0 で教示してください。
-
初期位置(P[99])は、キャリブレーション経路の最下層中心とされます。
-
-
経路設定例
-
初期位置は最下層中心にあります。ロボットが3×3×3計27の経路点全て通過した後、中央層の中心に移動して、角度を付けながら撮像します。
-