Adapter通信
Adapter通信の基本概念 を理解した後、実際のプロジェクトに使用している外部機器を組み合わせ、Adapter通信に関連するタスクを完了する必要があります。
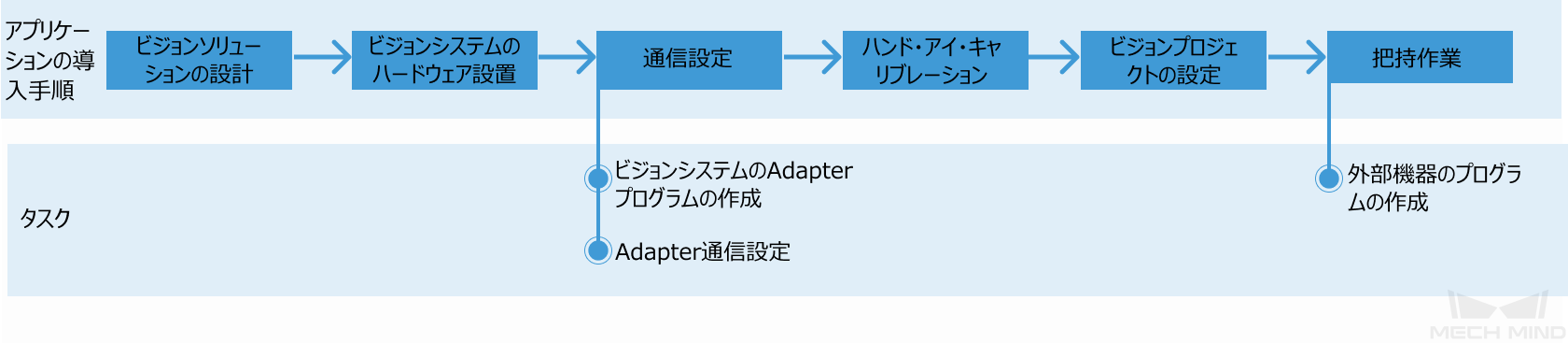
| このマニュアルは、導入手順において通信に関連する内容について説明します。導入手順の他の詳細なタスクについては、 アプリケーションの導入手順 をご参照ください。 |
| タスク | 説明 |
|---|---|
ビジョンシステムのAdapterプログラムを作成 |
Adapterプログラムは、外部機器とビジョンシステムを接続する架け橋であり、内部ではMech-VisionおよびMech-Vizと通信し、外部ではロボット、PLC、または上位システムと通信します。 AdapterプログラムはPythonコードで実装されます。具体的な実装方法は次の2つです。
|
Adapter通信を設定 |
作成したAdapterプログラムをビジョンシステムに適用し、ビジョンシステム側でAdapter通信サービスが有効になっていることを確認します。詳細な操作方法については、 Adapter通信を設定 をご参照ください。 |
外部機器のプログラムを作成 |
外部機器のプログラムの主な機能は、ビジョンシステムから対象物の情報またはロボットの動作経路を取得し、それに基づいてロボット、PLC、または上位システムを操作することです。 |