Mech-Viz経路を取得(上級)
概要
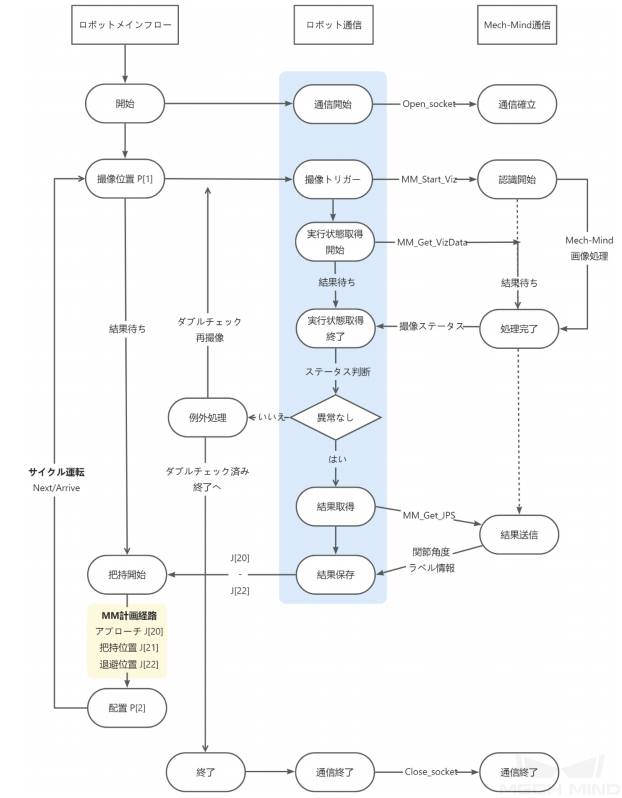
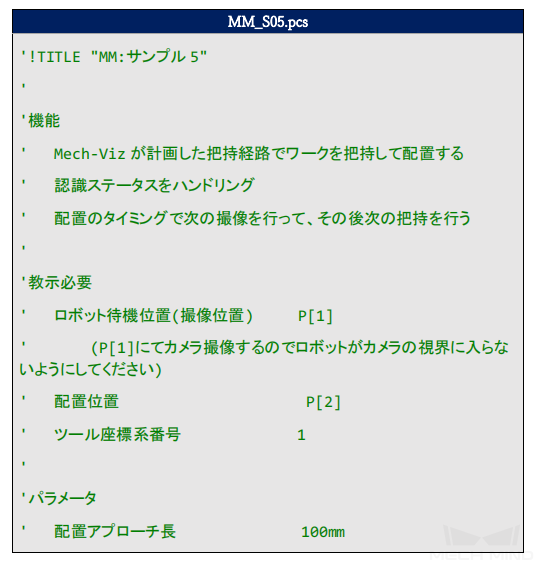
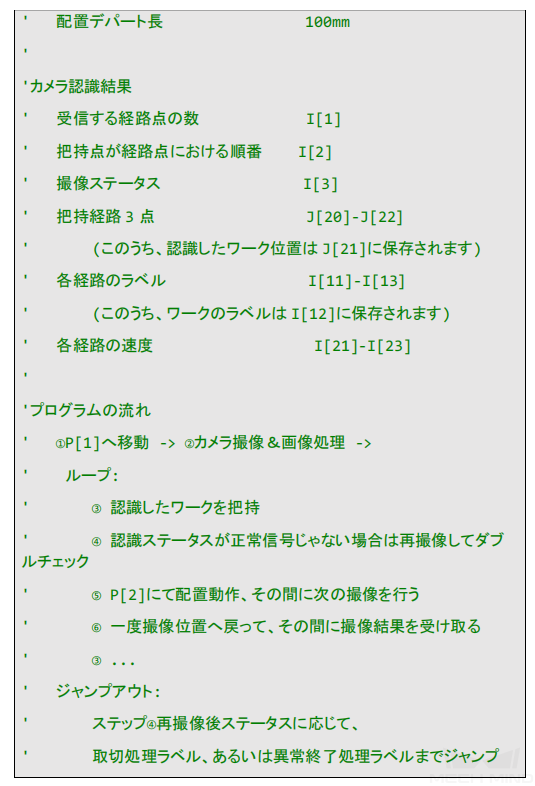
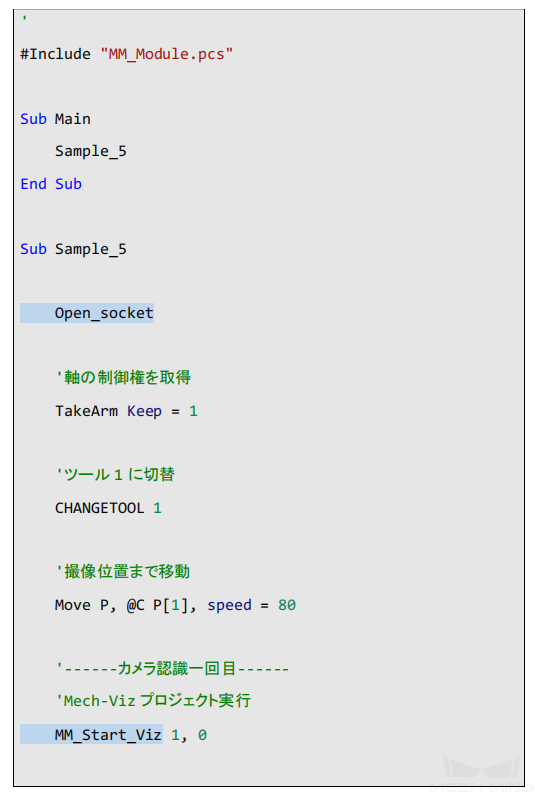
サンプル⑤「MM_S05」は、通常のMech-Vizを利用したフロー( サンプル②)を元に、生産ラインに運用される際注意すべき点を配慮しながら、処理を行います。
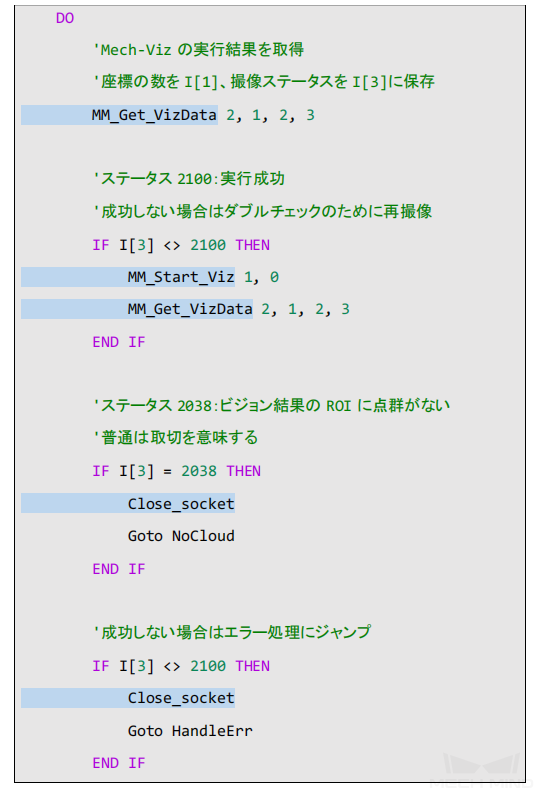
ステータスコードによる分岐処理
-
テスト運転やライン稼働時に、ビジョン処理の結果によって処理の分岐は基本的以下の 3 種類に分けます:
-
実行成功の場合はそのまま把持に移行
-
3DROI 内に点群なしの場合はワークがないと見られるため、ワーク供給や完了信号を出力
-
実行エラーの場合は把持できるものがないと見られるため、振動台で荷姿を変える、認識を止めて次の箱を流す
-
-
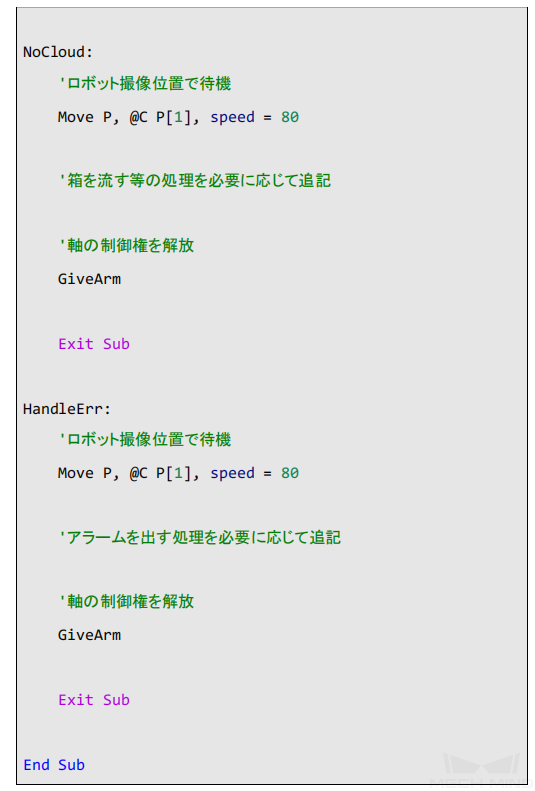
3D ROI内に点群なしや実行エラーの場合、突如発生する予期しない事情(想定外の物の写り込み、カメラ振動による撮像不良、電圧不安定)による誤判を防ぐため、もう一度再撮像を行うことが多いです。ただし、サンプルではエラー処理の部分で、撮像位置に戻して実行終了としています。運用の際は適宜変更してください。