標準インターフェース通信
標準インターフェース通信の基本概念 を理解した後、実際のプロジェクトとお使いのロボットまたはPLCに基づいて、標準インターフェース通信に関連するタスクを完了する必要があります。
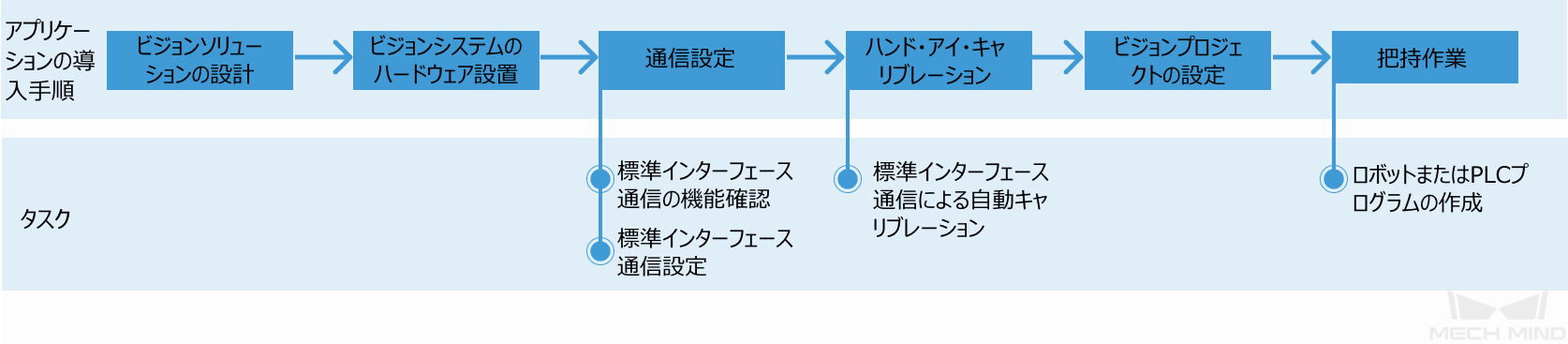
| このマニュアルは、導入手順において通信に関連する内容について説明します。導入手順の他の詳細なタスクについては、 アプリケーションの導入手順 をご参照ください。 |
| タスク | 説明 |
|---|---|
標準インターフェース通信の機能確認 |
ロボットまたはPLCの標準インターフェース機能の説明を確認し、その機能がプロジェクト要件に適合していることを確認します。 |
標準インターフェース通信設定 |
ロボットまたはPLCがビジョンシステムと正しく通信できることを確認します。 |
標準インターフェース通信による自動キャリブレーション |
カメラ座標系とロボット座標系との対応関係を求めます。 |
ロボットまたはPLCプログラムの作成 |
ロボットまたはPLCの標準インターフェースコマンドを確認し、対応するサンプルプログラムを参照して、ロボットまたはPLCプログラムを作成します。このプログラムの主な機能は、ビジョンシステムから対象物の情報またはロボットの動作経路を取得し、それに基づいてロボットを操作することです。 |
|