Vizティーチング通信
Vizティーチング通信の基本概念 を理解した後、実際のプロジェクトとお使いのロボットに基づいて、Vizティーチング通信に関連するタスクを完了する必要があります。
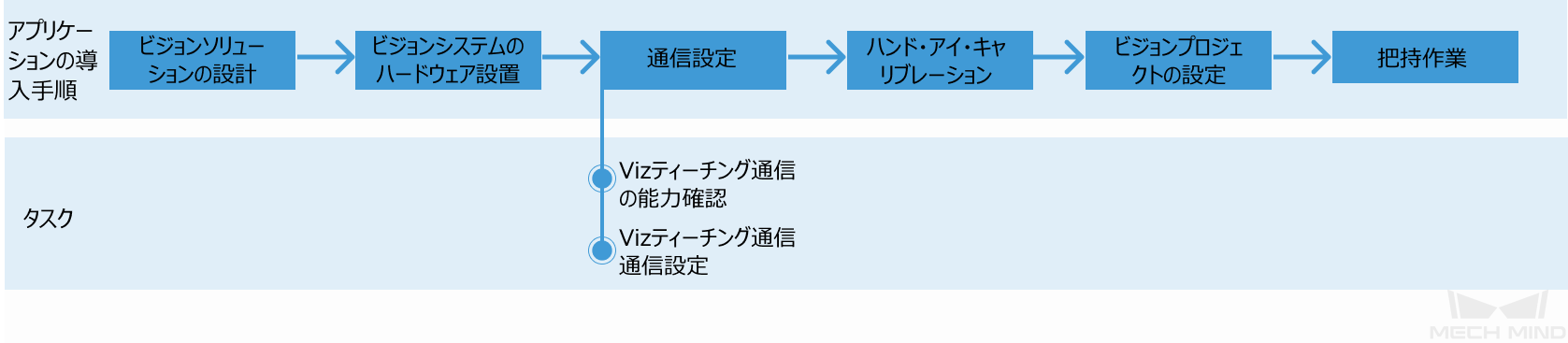
| このマニュアルは、導入手順において通信に関連する内容について説明します。導入手順の他の詳細なタスクについては、 アプリケーションの導入手順 をご参照ください。 |
| タスク | 説明 |
|---|---|
ロボット能力一覧(Vizティーチング通信の場合)を確認 |
通信、ロボット動作、データの送受信、ロボットの設定、デジタル入出力などの各機能がプロジェクトの要件を満たしていることを確認します。 |
Vizティーチング通信を設定 |
ロボットとビジョンシステムが正常に通信できることを確認します。 |
|