Manuel d’utilisation du matériel
Consignes de sécurité
|
|
Environnement de fonctionnement
|
|
Montage du produit
|
|
Utilisation du produit
|
|
|
Alimentation en air
|
Utilisation de l’adaptateur / alimentation sur rail DIN
|
|
|
Sécurité laser
|
Consignes d’élimination
|
Certifications
Le produit est conforme aux normes et exigences d’évaluation suivantes. Veuillez noter que les statuts de certification peuvent être mis à jour. Pour plus d’informations, veuillez contacter les agents commerciaux locaux.
Conforme aux exigences et normes suivantes :
-
Normes européennes de compatibilité électromagnétique
-
Normes américaines ANSI C63.4, 47 CFR PART 15B, et UL 61010-1
-
Canada ICES-003
-
Japon VCCI-CISPR 32:2016
-
Corée du Sud KS C 9832 et KS C 9835
Sécurité des produits laser
La classification du laser est mise en œuvre sur la base de la norme IEC 60825-1:2014, conformément aux exigences de la Laser Notice n° 56 de la FDA (CDRH).
CE

Le texte intégral de la Déclaration UE de conformité est disponible à l’adresse https://downloads.mech-mind.com/?tab=tab-eu-dec
Normes européennes de compatibilité électromagnétique :
-
EN 55032:2015+A11:2020+A1:2020
-
EN IEC 61000-3-2:2019+A1:2021
-
EN 61000-3-3:2013+A1:2019+A2:2021
-
EN 55035:2017+A11:2020

Tous les produits portant ce symbole sont des déchets d’équipements électriques et électroniques (DEEE au sens de la directive 2012/19/UE) qui ne doivent pas être mélangés aux déchets ménagers non triés. Vous devez plutôt protéger la santé humaine et l’environnement en remettant votre équipement usagé à un point de collecte désigné pour le recyclage des déchets d’équipements électriques et électroniques, désigné par le gouvernement ou les autorités locales. Une élimination et un recyclage appropriés contribueront à éviter des conséquences négatives potentielles pour l’environnement et la santé humaine. Veuillez contacter les autorités locales pour plus d’informations sur l’emplacement ainsi que sur les modalités et conditions de ces points de collecte.
FCC
NOTE: Cet équipement a été testé et jugé conforme aux limites applicables aux dispositifs numériques de classe A, conformément à la partie 15 des règles de la FCC. Ces limites sont conçues pour fournir une protection raisonnable contre les interférences nuisibles lorsque l’équipement est utilisé dans un environnement commercial. Cet équipement génère, utilise et peut émettre de l’énergie radiofréquence et, s’il n’est pas installé et utilisé conformément au manuel d’instructions, peut provoquer des interférences nuisibles aux communications radio. L’utilisation de cet équipement dans une zone résidentielle est susceptible de provoquer des interférences nuisibles, auquel cas l’utilisateur devra corriger les interférences à ses propres frais.
Cet appareil est conforme à la partie 15 des règles de la FCC. Son fonctionnement est soumis aux deux conditions suivantes : (1) cet appareil ne doit pas provoquer d’interférences nuisibles, et (2) cet appareil doit accepter toute interférence reçue, y compris celles pouvant entraîner un fonctionnement indésirable de l’appareil.
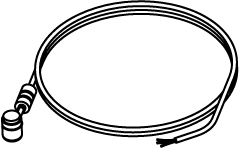
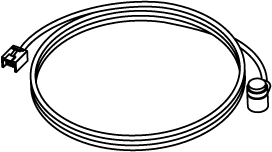
Contenu de l’emballage
|
|
|
|
|
|
|
|
|
|
Vis à tête cylindrique à six pans creux M4 × 8 (Qté : 8) |
Vis à tête cylindrique à six pans creux M5 × 8 (Qté : 8) |
Vis à tête cylindrique à six pans creux M8 × 20 (Qté : 2) |
Boulons en T M8 × 20 (Qté : 2) |
|
|
Écrous M8 (Qté : 2) |
Écrous M8 à bride (Qté : 2) |
|
|
Rondelles M8 (Qté : 2) |
Goupilles cylindriques Ø6 × 10 (Qté : 4) |
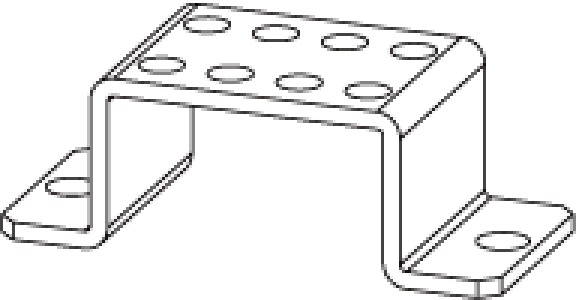
Support pour colliers de serrage (Qté : 1) |
Colliers de serrage (Qté : 50) |
|
|
Clés hexagonales (Qté : 3) |
Plaque de calibration (uniquement UHP-140-GL) |
|
|
|
Accessoires optionnels
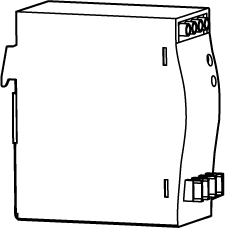
Alimentation sur rail DIN |
Plaque de calibration (sauf pour UHP-140-GL) |
|
|
|
Pour les spécifications techniques de l’alimentation rail DIN ou de la plaque de calibration, voir Alimentation sur rail DIN et Plaque d’étalonnage. |
Schémas fonctionnels
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, et UHP-140-GL
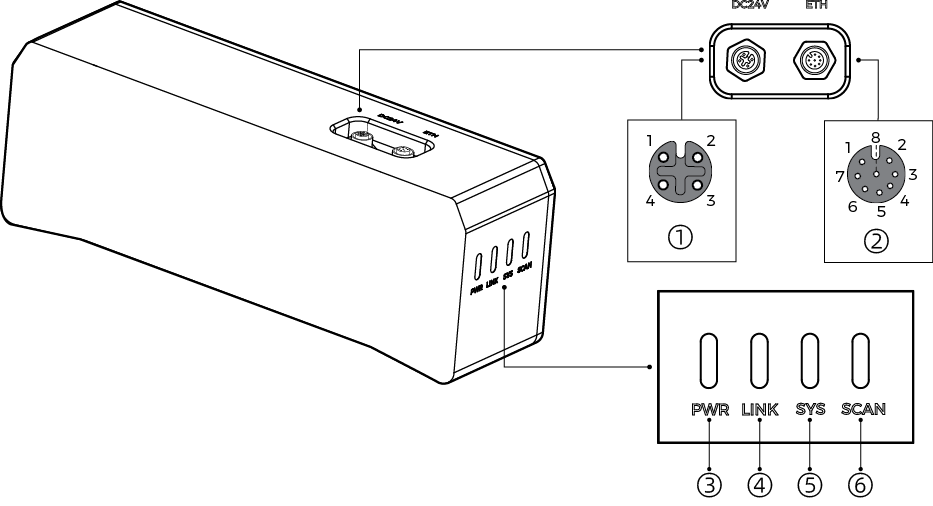
N° |
Nom |
Fonction |
|
|---|---|---|---|
① |
Port DC 24V |
1: GND |
3: 24 VDC |
2: GND |
4: 24 VDC |
||
② |
Port ETH |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
③ |
Voyant PWR |
Éteint: non connecté à l’alimentation |
|
Vert: tension normale |
|||
Jaune fixe: tension inférieure à 16 V ou supérieure à 28 V |
|||
Rouge fixe: tension inférieure à 12 V |
|||
④ |
Voyant LINK |
Éteint: non connecté au réseau |
|
Vert fixe ou clignotant: connecté au réseau |
|||
⑤ |
Voyant SYS |
Éteint: caméra non démarrée |
|
Vert fixe: démarrage de la caméra |
|||
Vert clignotant: fonctionnement normal de la caméra |
|||
Jaune clignotant: tension instable ou température anormale |
|||
Rouge clignotant: dysfonctionnement |
|||
⑥ |
Voyant SCAN |
Vert fixe: acquisition et traitement des données |
|
Pas d’acquisition ni de traitement de données |
|||
NANO-GL et NANO ULTRA-GL
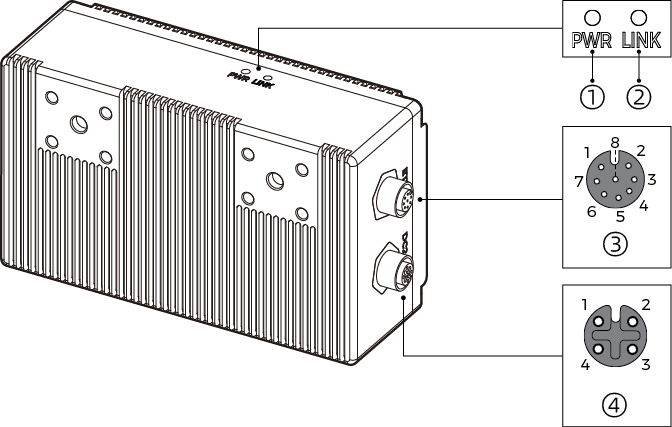
|
La figure ci-dessus utilise NANO-GL à titre d’exemple. |
N° |
Nom |
Fonction |
|
|---|---|---|---|
① |
Voyant PWR |
Éteint: non connecté à l’alimentation |
|
Vert: tension normale |
|||
② |
Voyant LINK |
Éteint: non connecté au réseau |
|
Vert fixe ou clignotant: connecté au réseau |
|||
③ |
Port ETH |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
④ |
Port DC 24V |
1: GND |
3: 24 VDC |
2: GND |
4: 24 VDC |
||
Monter la caméra
La caméra peut être montée selon les configurations suivantes :
| Configuration | Exigences |
|---|---|
Montée sur la bride du robot et se déplace avec le robot. 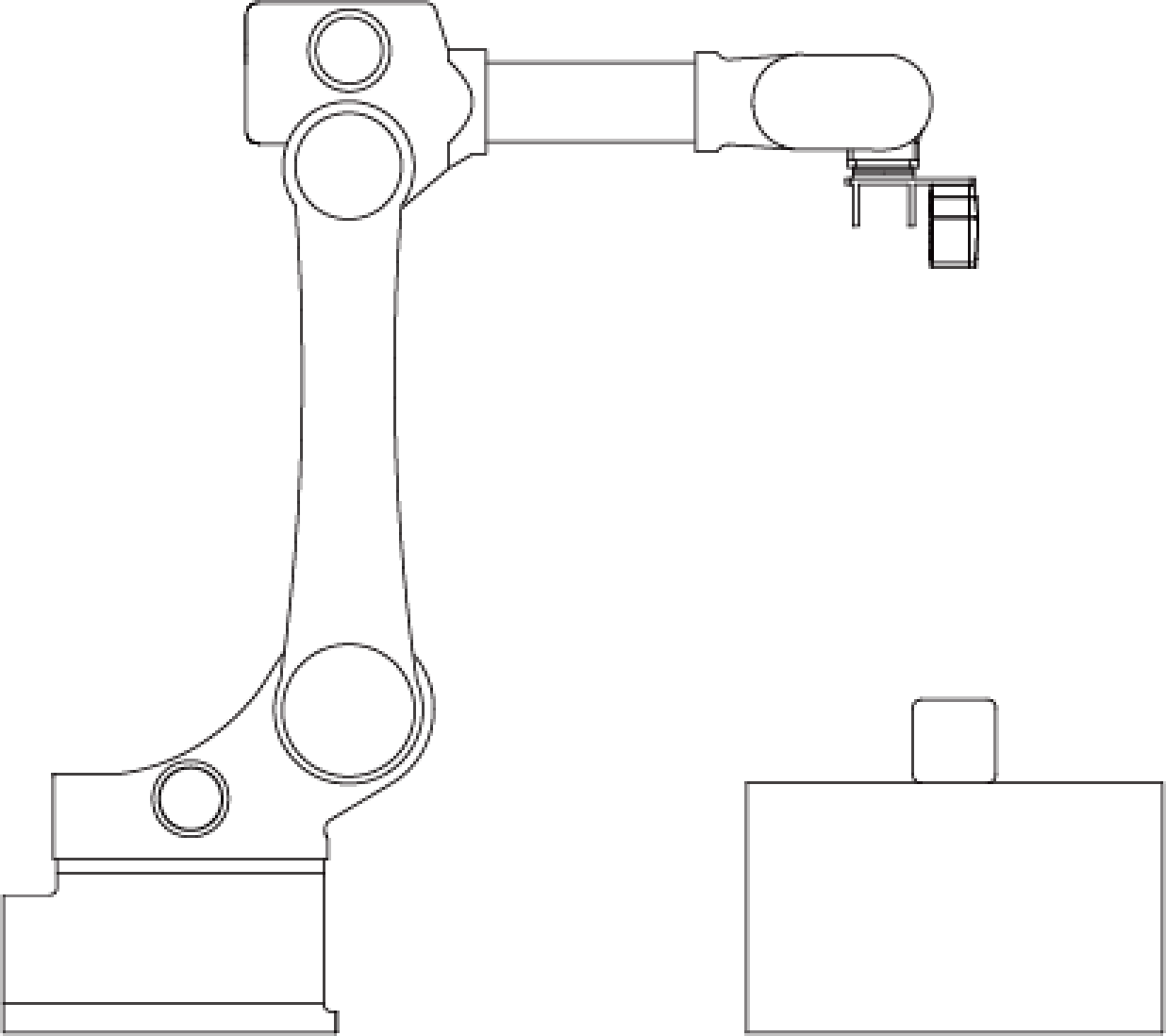
|
|
Montée sur une structure fixe et ne se déplace pas avec le robot. 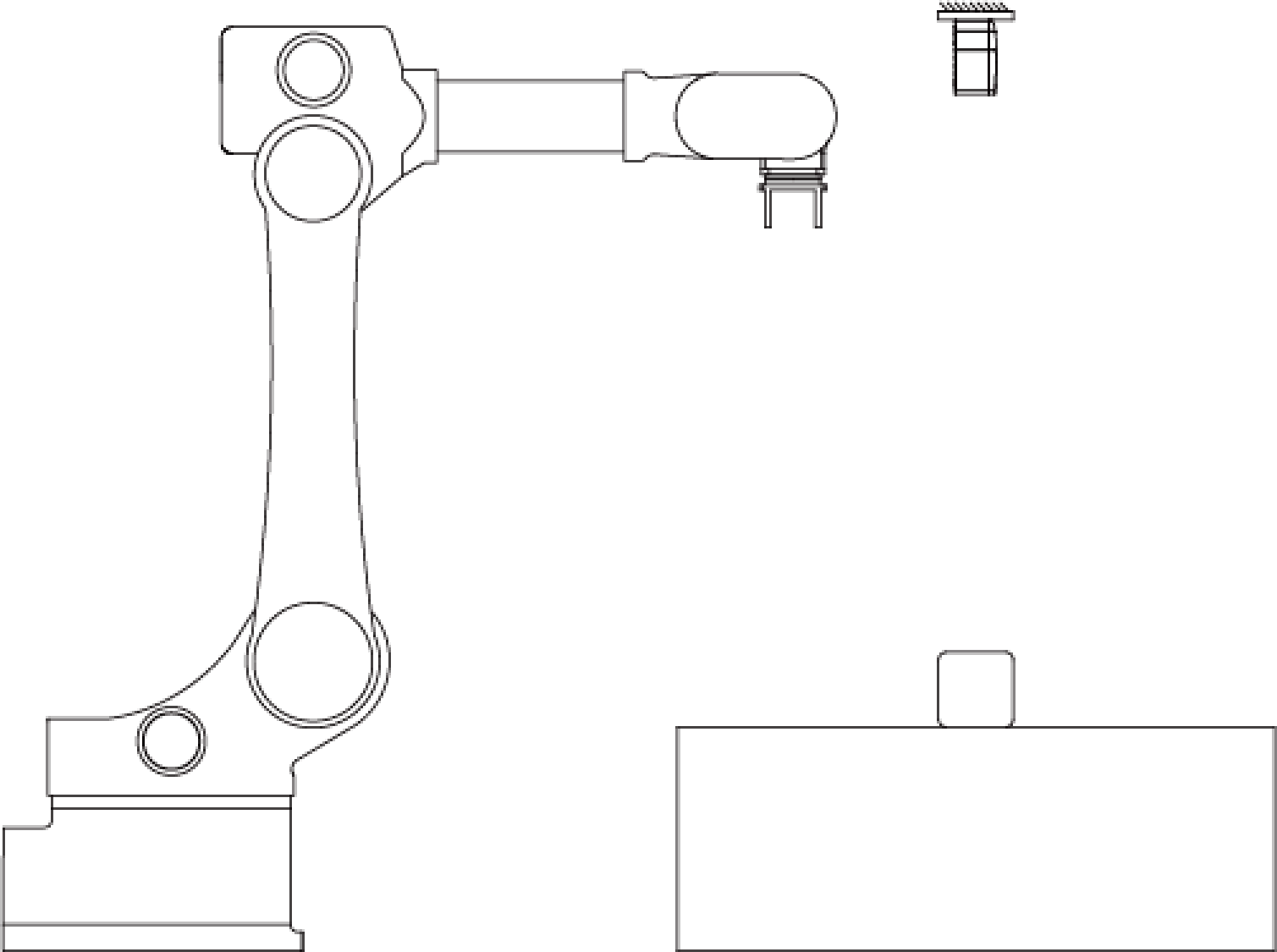
|
|
Montée sur un rail linéaire et se déplace avec le rail linéaire. 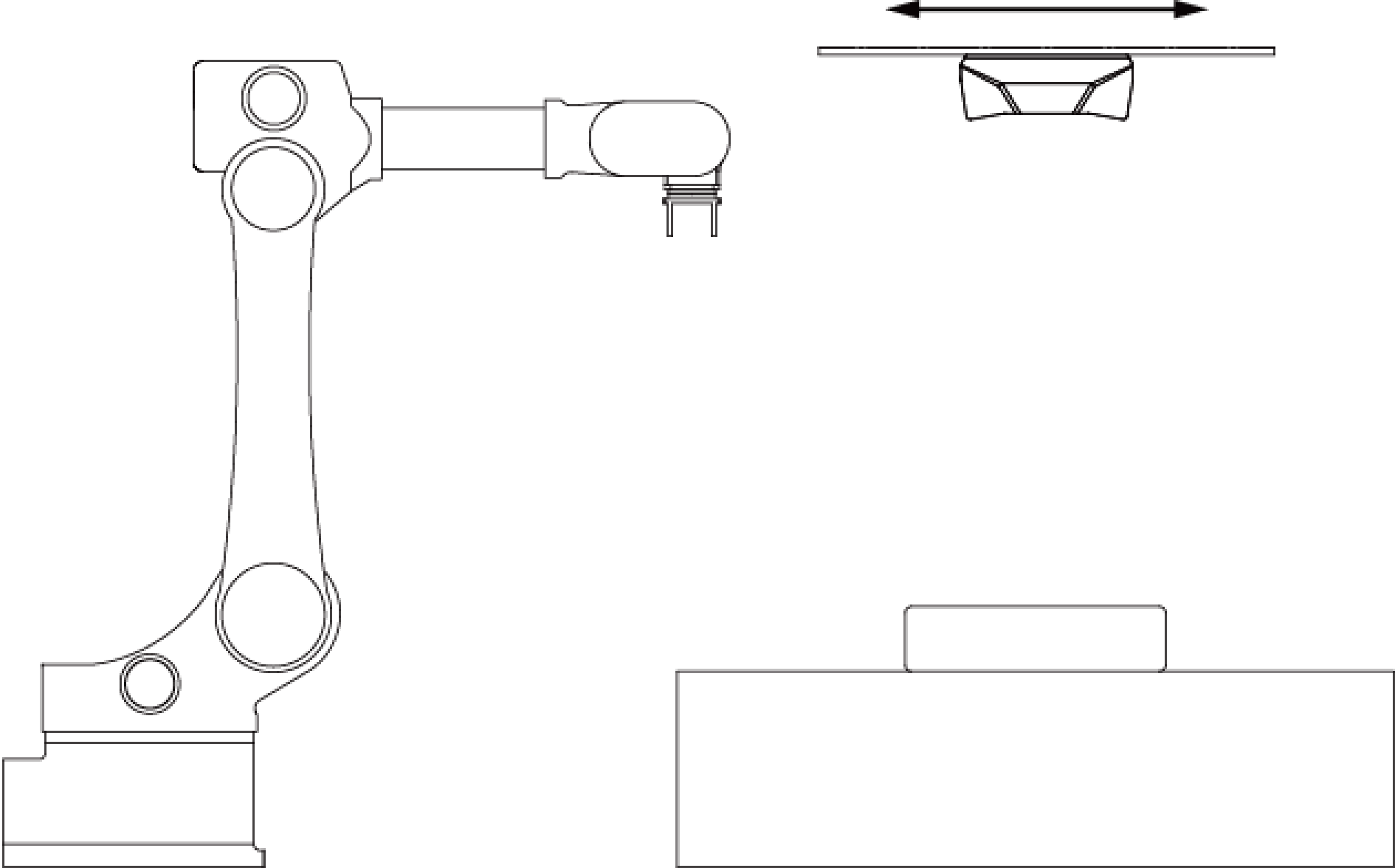
|
|
|
Après avoir déterminé la configuration, référez-vous aux sections suivantes et fixez la caméra sur la surface de montage via le support de caméra ou des trous taraudés.
|
Monter via le support de caméra
À l’aide du support de caméra, vous pouvez monter la caméra sur les types de surfaces suivants :
-
Profilé en aluminium à rainure en T
-
Surface avec des trous de fixation percés
|
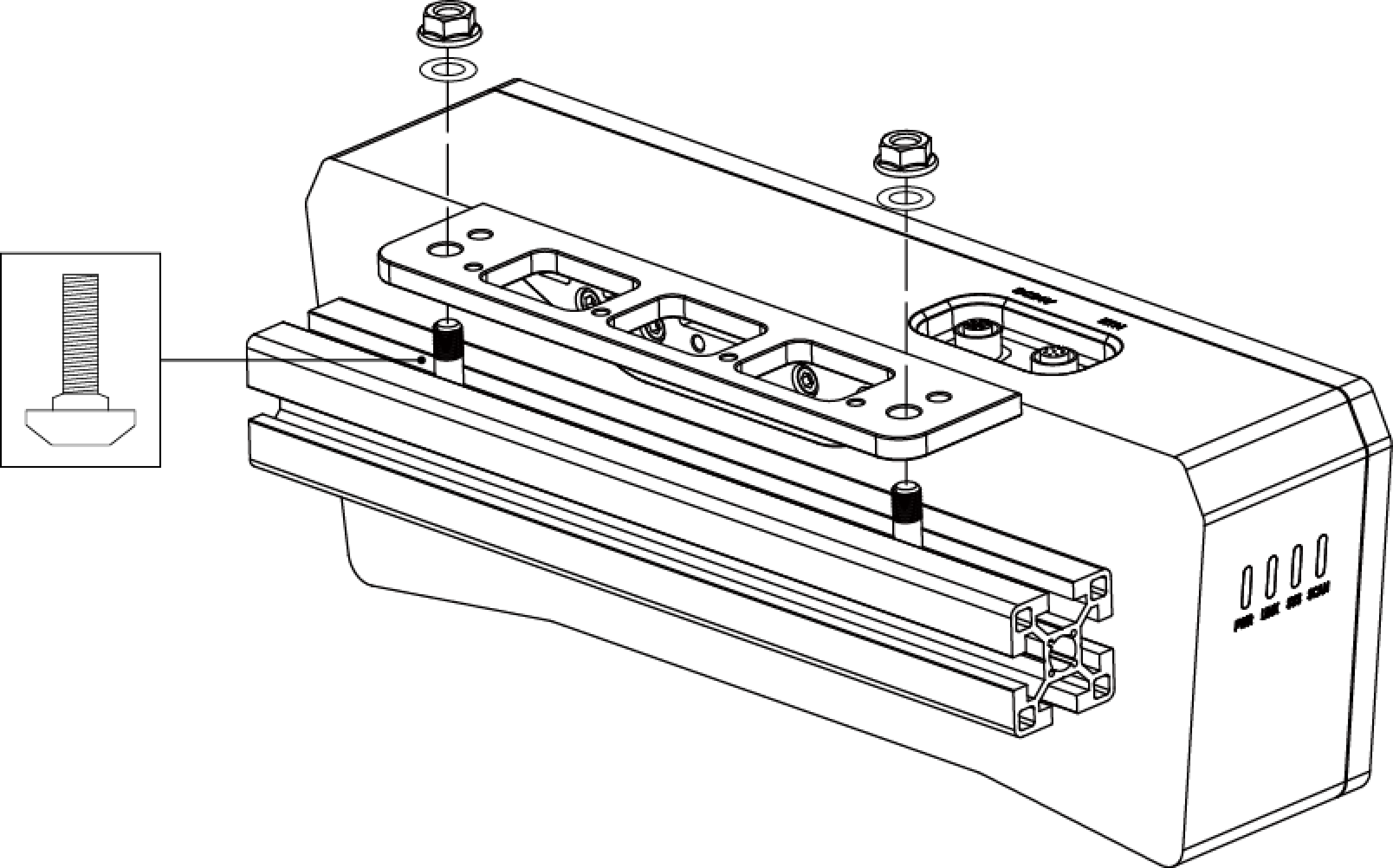
Monter sur un profilé en aluminium à rainure en T
Comme illustré ci-dessous, placez 2 rondelles M8 et 2 boulons en T M8 × 20, puis utilisez la clé plate pour serrer 2 écrous à collerette. Le couple de serrage recommandé est de 12 à 13 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
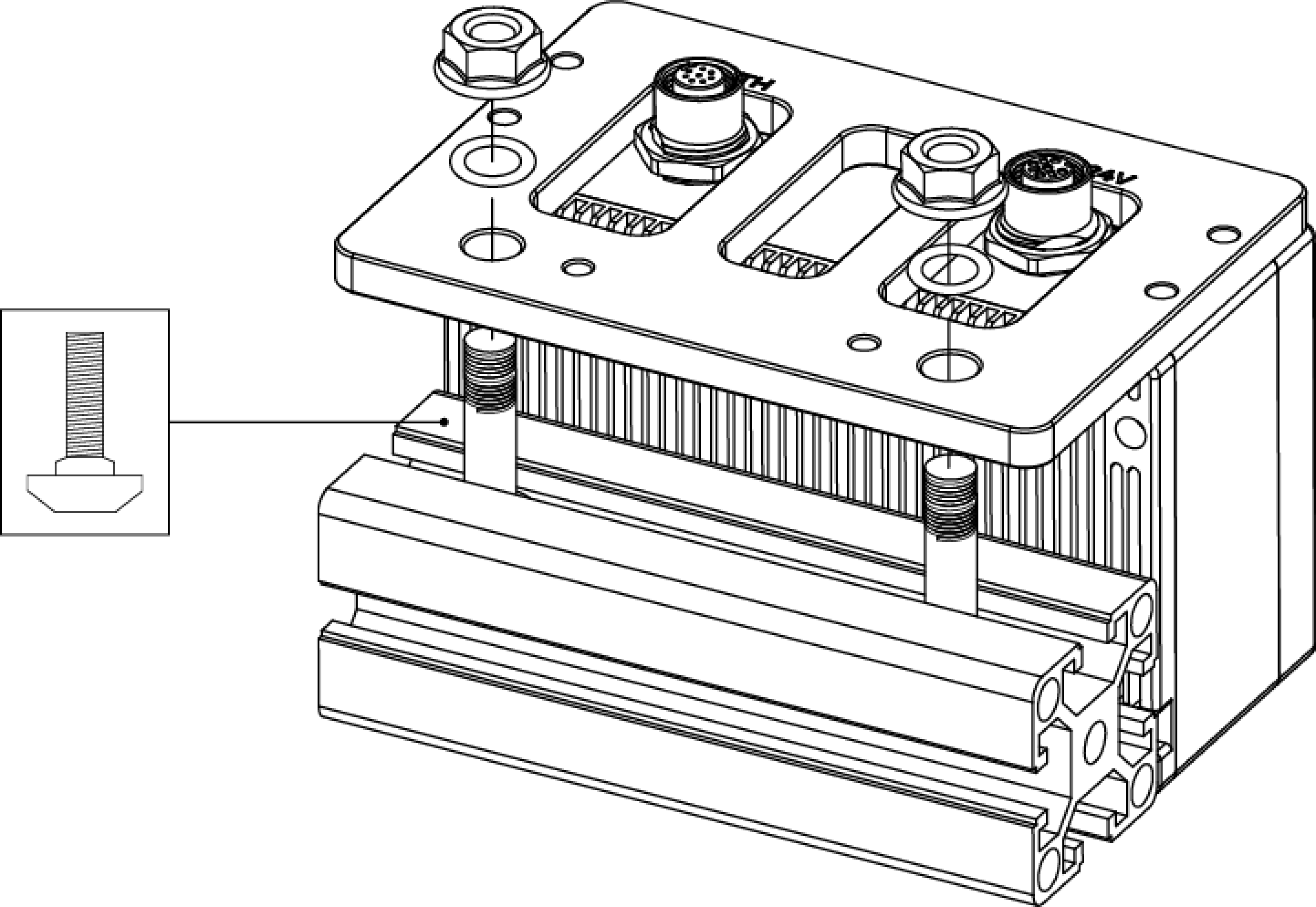
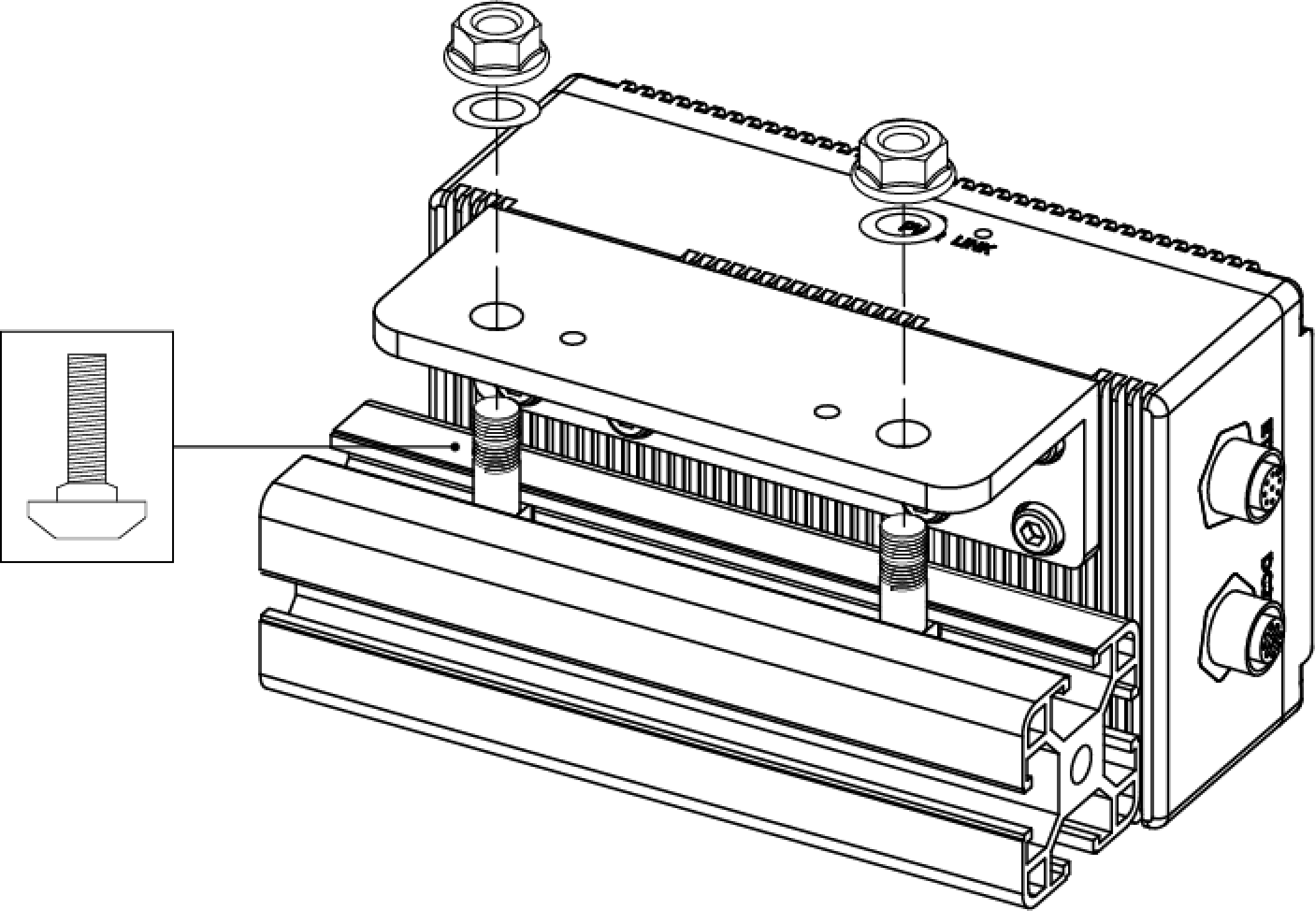
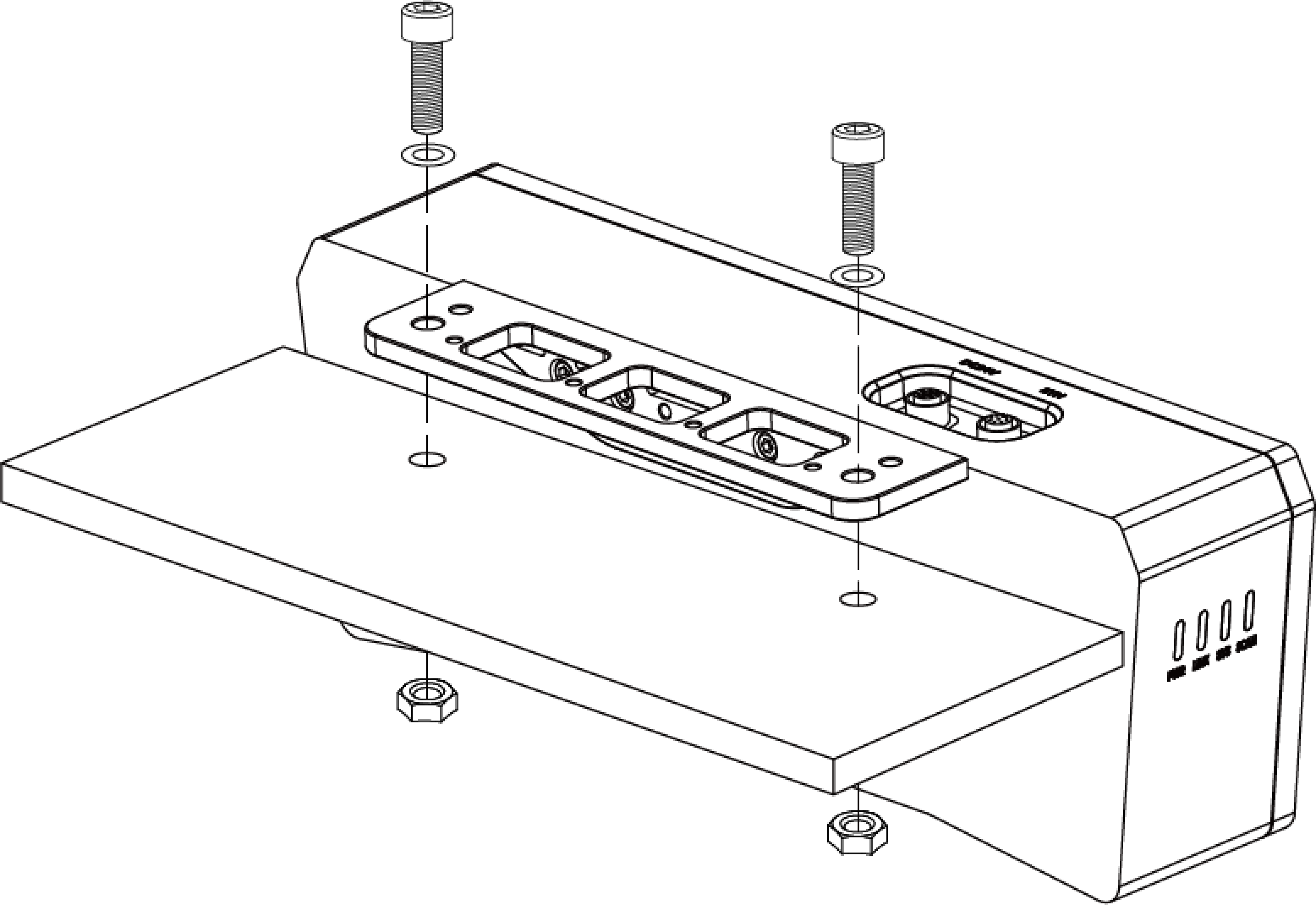
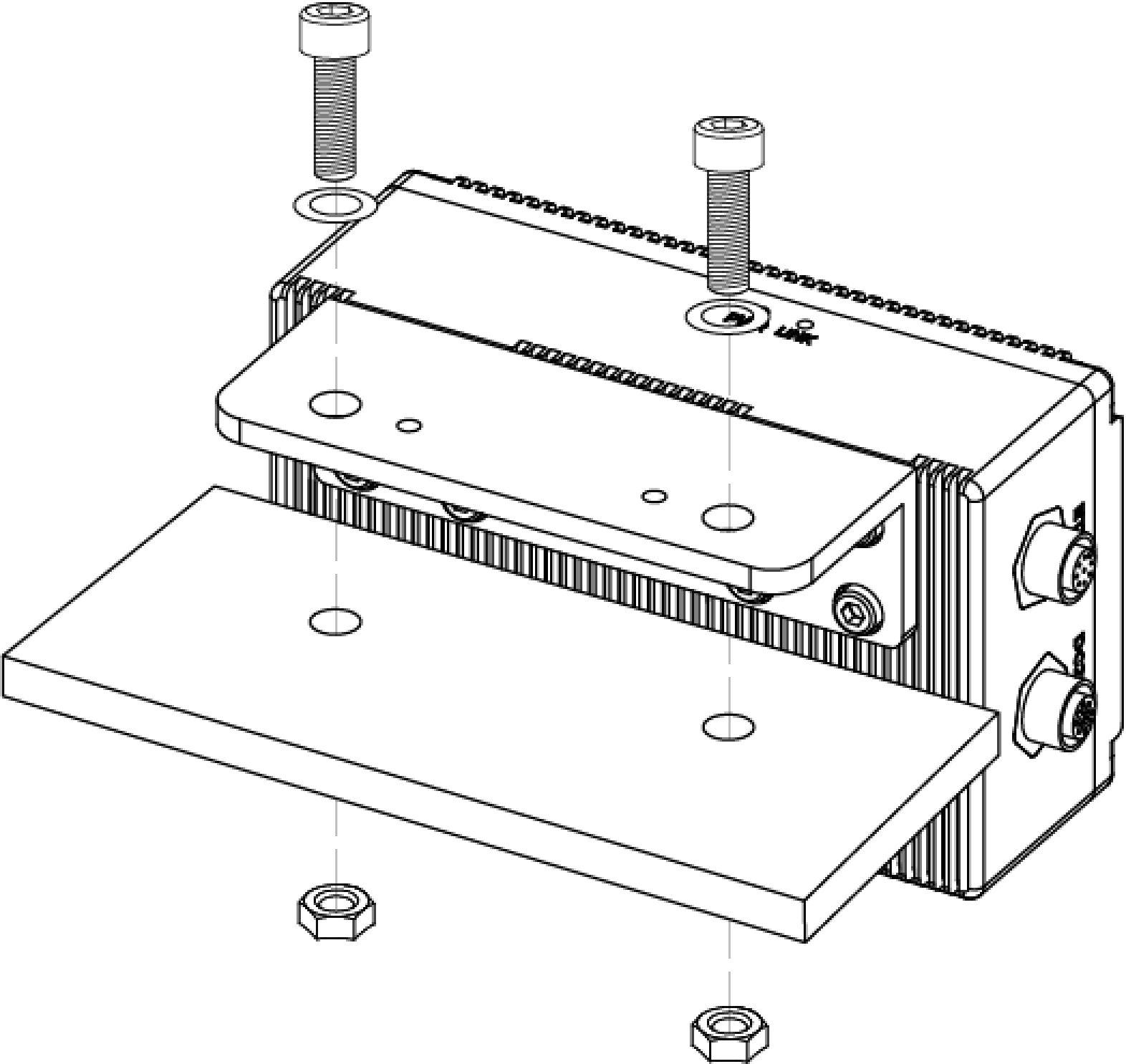
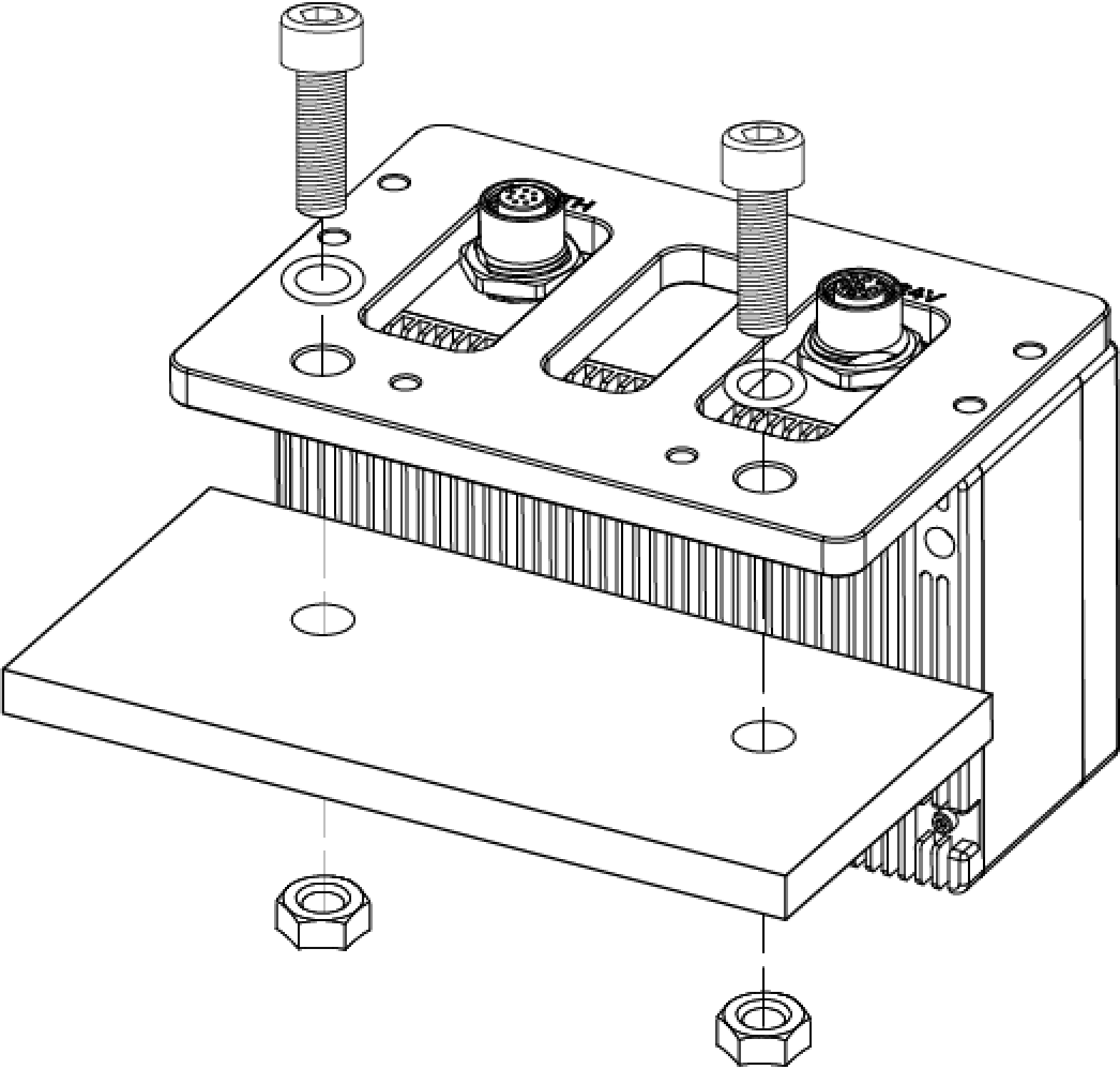
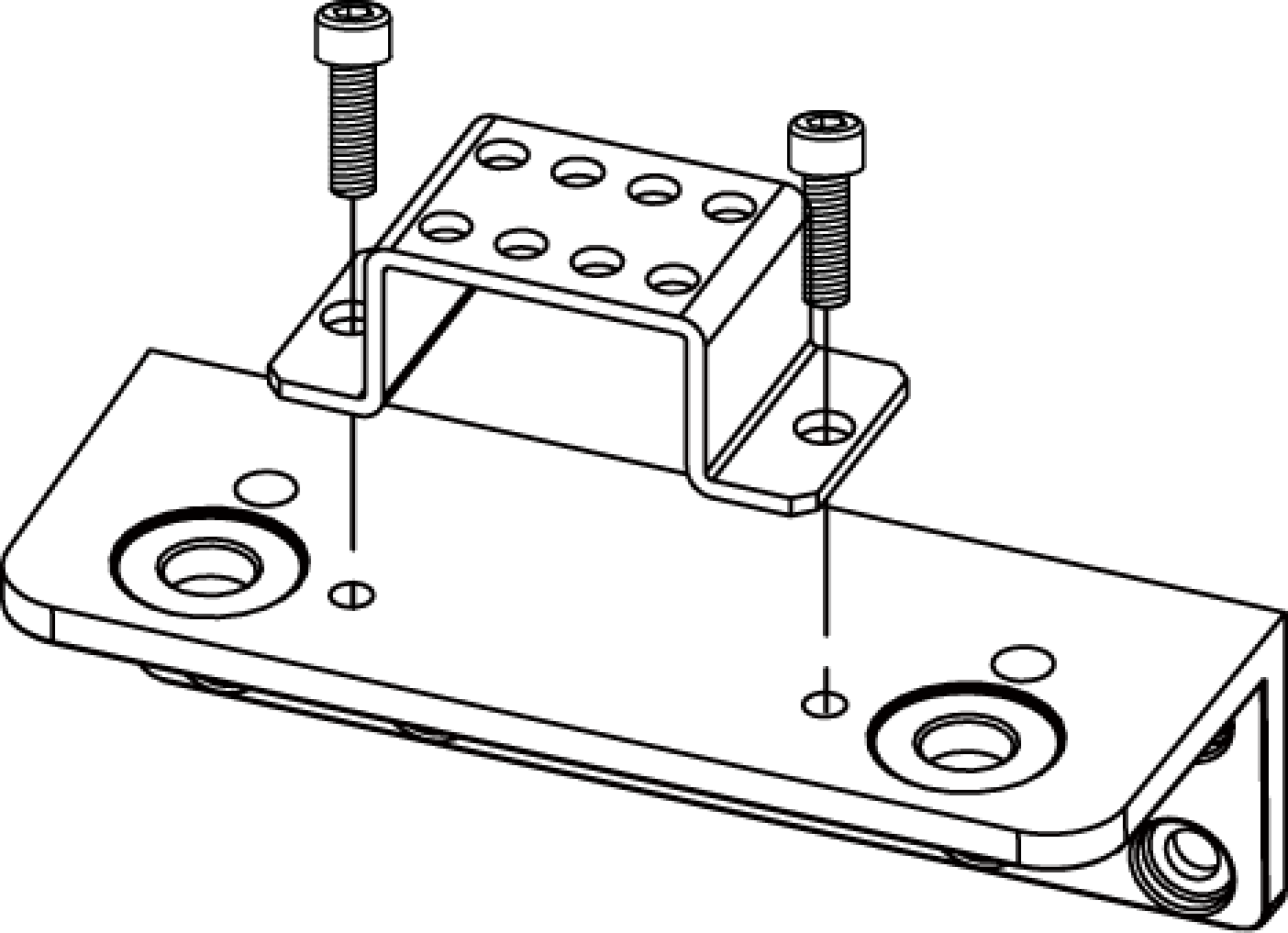
Monter sur une surface avec des trous de fixation percés
Comme illustré ci-dessous, placez 2 rondelles M8 et 2 vis à tête cylindrique à six pans creux M8 × 20, puis utilisez la clé plate pour serrer 2 écrous. Le couple de serrage recommandé est de 12 à 13 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
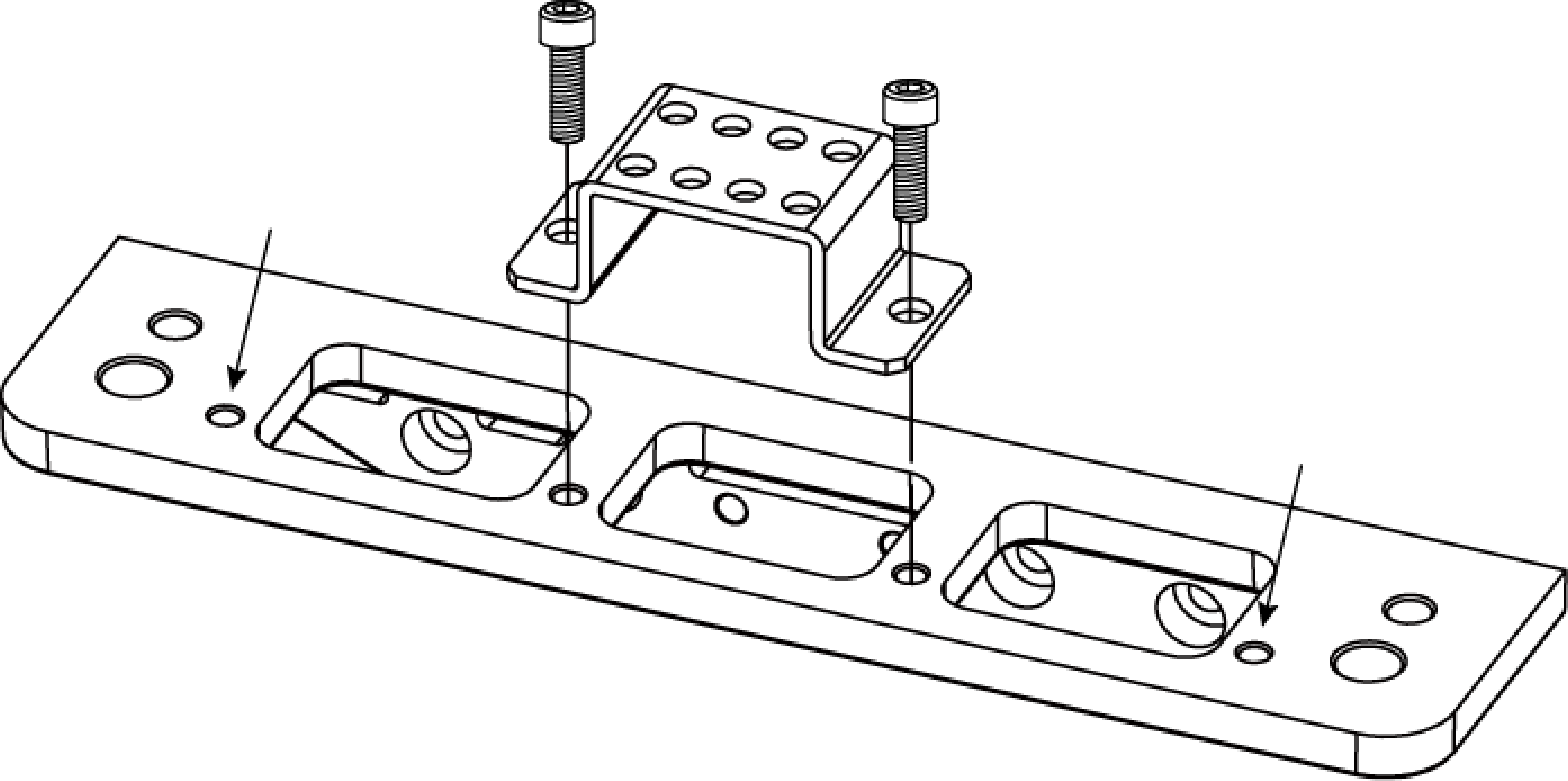
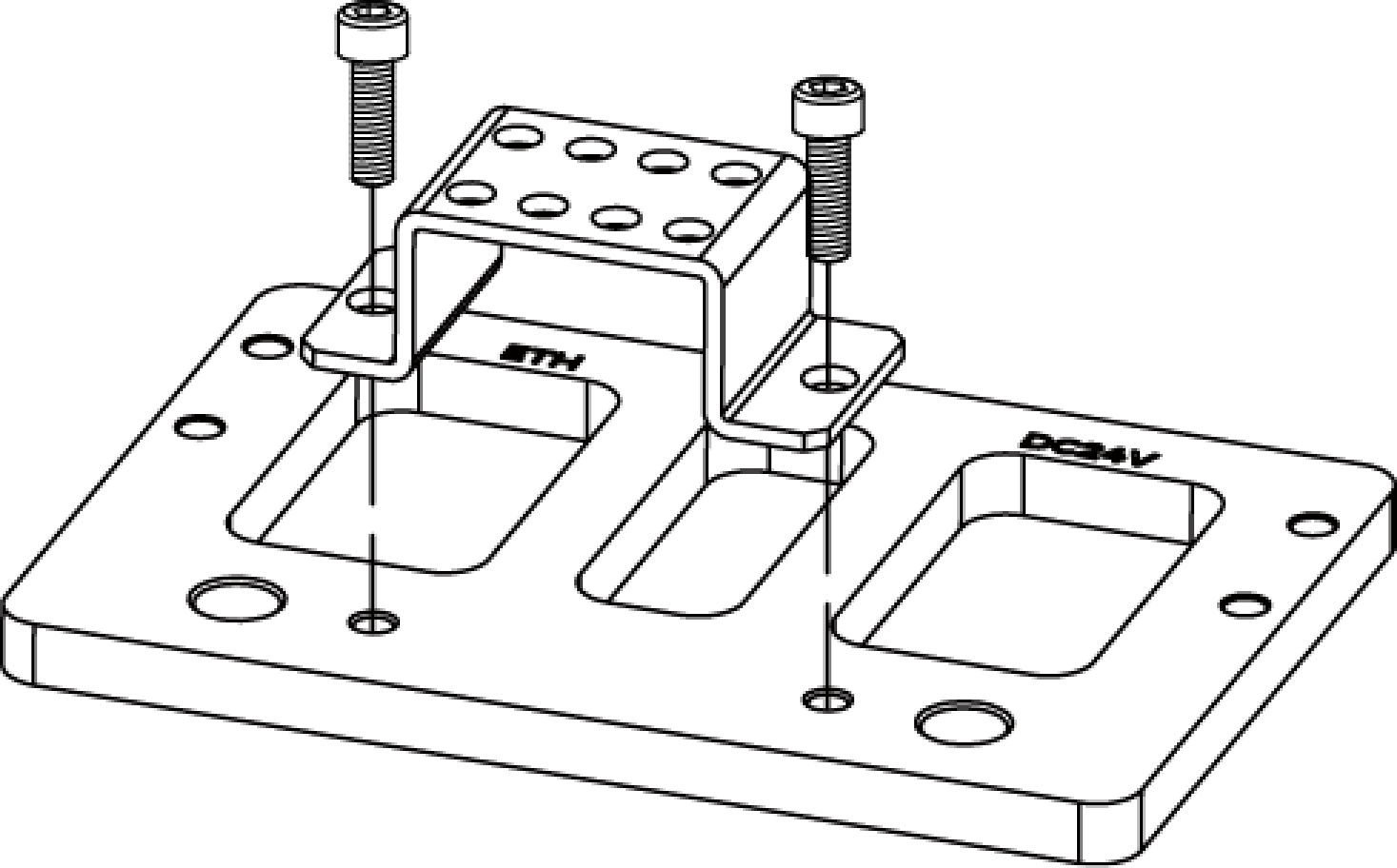
Monter le support d’attache-câble
Après avoir monté le support d’attache-câble, vous pouvez fixer les câbles avec des colliers pour éviter d’endommager les câbles par la traction.
Comme illustré ci-dessous, utilisez la clé hexagonale pour serrer 2 vis à tête cylindrique à six pans creux M5 × 8. Le couple de serrage recommandé est de 2,2 à 2,5 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL: Vous pouvez utiliser les trous taraudés à différentes positions (indiquées par des flèches) pour monter le support d’attache-câble.
-
NANO-GL:
-
NANO ULTRA-GL:
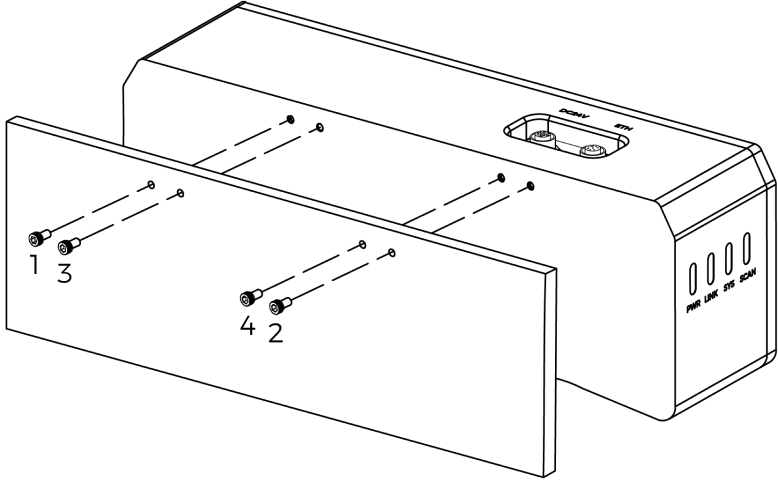
Monter via les trous taraudés à l’arrière
|
Lors du montage de LSR S-GL et NANO ULTRA-GL avec cette méthode, veillez à ce que l’arrière de la caméra soit en contact étroit avec une surface métallique pour la dissipation thermique, afin que la caméra ne surchauffe pas et ne fonctionne pas mal. |
-
Utilisez la clé hexagonale pour retirer le support de caméra. Pour LSR S-GL et NANO ULTRA-GL, retirez également le panneau de dissipation thermique.
-
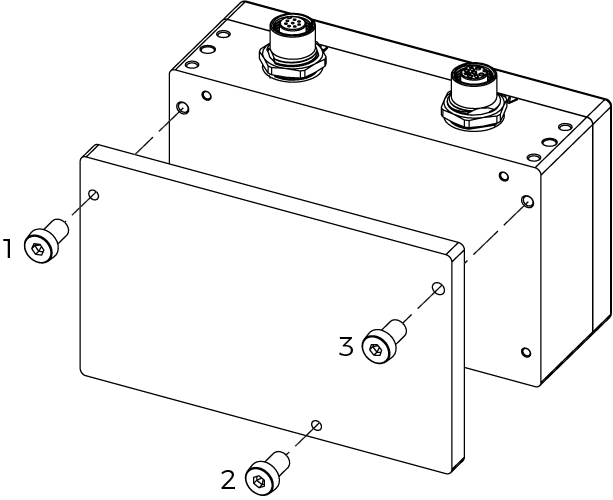
Comme illustré ci-dessous, placez les vis à tête cylindrique à six pans creux de la spécification correspondante dans les trous de montage. Ensuite, utilisez la clé hexagonale pour visser légèrement les vis dans l’ordre indiqué, puis serrez complètement tous les boulons dans l’ordre indiqué.
-
NANO ULTRA-GL: vis à tête cylindrique à six pans creux M4 × 8 (couple de serrage recommandé : 1,4 à 1,6 N·m)
-
Autres modèles : vis à tête cylindrique à six pans creux M5 × 8 (couple de serrage recommandé : 2,2 à 2,5 N·m)
Le nombre de vis nécessaires varie selon le modèle.
-
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
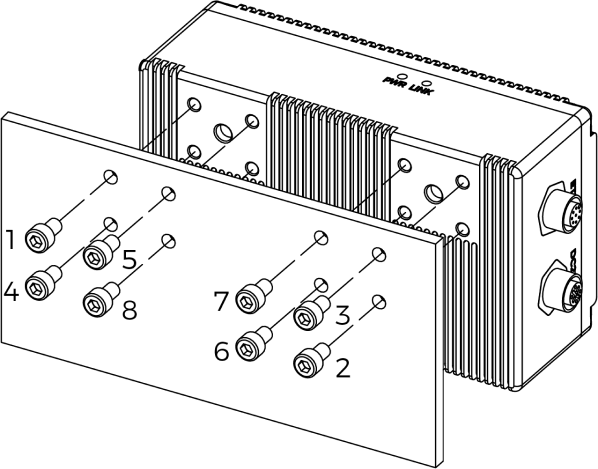
Monter via les trous taraudés sur le dessus
Les modèles suivants offrent des trous taraudés pour un montage sur le dessus : LSR S-GL, LSR XL-GL, NANO ULTRA-GL et UHP-140-GL.
-
Utilisez la clé hexagonale pour retirer le support de caméra.
-
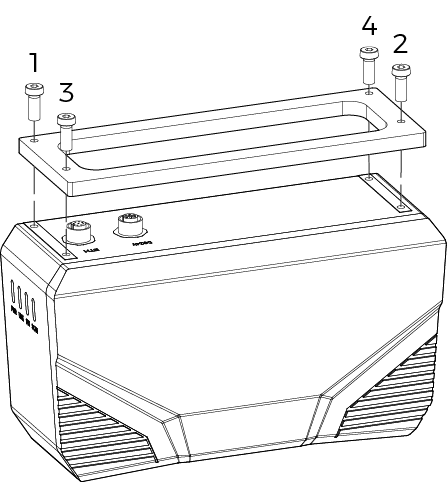
Comme illustré ci-dessous, placez les vis à tête cylindrique à six pans creux de la spécification correspondante dans les trous de montage. Ensuite, utilisez la clé hexagonale pour visser légèrement les vis dans l’ordre indiqué, puis serrez complètement tous les boulons dans l’ordre indiqué.
-
NANO ULTRA-GL: vis à tête cylindrique à six pans creux M4 × 8 (couple de serrage recommandé : 1,4 à 1,6 N·m)
-
Autres modèles : vis à tête cylindrique à six pans creux M5 × 8 (couple de serrage recommandé : 2,2 à 2,5 N·m)
-
Connecter la caméra
Câble Ethernet et câble d’alimentation DC
-
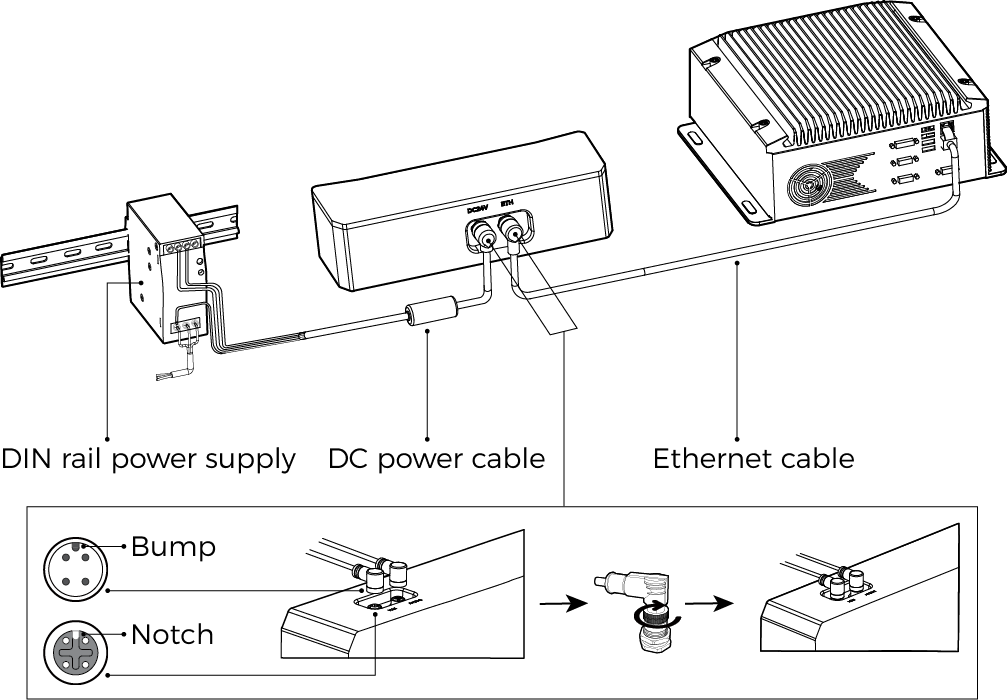
Câble Ethernet: Insérez le connecteur M12-A du câble Ethernet dans le port ETH de la caméra, et insérez le connecteur RJ45 dans le port Ethernet de l’IPC.
-
Câble d’alimentation DC: Insérez le connecteur M12-A du câble d’alimentation DC dans le port DC 24V de la caméra.
Lors de l’insertion du câble Ethernet et du câble d’alimentation DC:
-
Alignez l’ergot du connecteur avec l’encoche du port.
-
Serrez l’écrou. Le couple de serrage recommandé est de 0.7 N·m. Un jeu d’environ 2 mm subsiste une fois l’écrou complètement serré.
|
Alimentation sur rail DIN
|
-
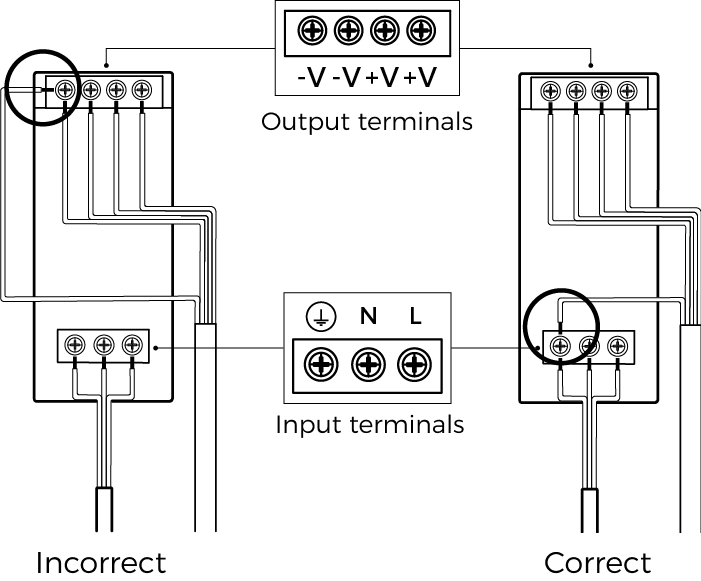
Utilisez un tournevis plat pour desserrer les vis sur les bornes de l’alimentation sur rail DIN.
-
Connectez le câble d’alimentation DC: Insérez les deux fils portant les étiquettes +V dans les deux bornes de sortie +V de l’alimentation sur rail DIN, les deux fils portant les étiquettes -V dans les deux bornes de sortie -V, et le fil portant l’étiquette PE dans la borne de terre (
 ).
). -
Connectez le câble d’alimentation AC: Insérez le fil de phase dans la borne d’entrée L de l’alimentation sur rail DIN, le fil neutre dans la borne d’entrée N, et le fil de terre dans la borne de terre (
). -
Utilisez le tournevis plat pour serrer les vis sur les bornes.
|
| Pour plus d’informations sur la sélection des câbles, le réglage de la tension des câbles et les précautions d’utilisation de l’alimentation sur rail DIN, voir Accessoires de caméra. |
Utiliser la caméra
Préchauffage
Afin de garantir que la précision des données acquises par le produit atteigne les valeurs indiquées dans les spécifications techniques, veuillez utiliser Outil de préchauffage pour préchauffer le produit avant de l’utiliser.
-
Durée de préchauffage recommandée: 60 minutes pour UHP-140-GL et LSR S-GL, et 30 minutes pour les autres modèles.
-
Intervalle d’acquisition de données recommandé: Préchauffez le produit en utilisant l’intervalle d’acquisition de données en usage réel. Si l’intervalle d’acquisition de données en usage réel n’est pas fixe, il est recommandé de préchauffer avec l’intervalle d’acquisition moyen. Par exemple, en usage réel, des données sont acquises toutes les 6 à 10 secondes, puis pendant le préchauffage, les données doivent être acquises toutes les 8 secondes.
Télécharger et installer Mech-Eye SDK
Le produit est contrôlé par le logiciel fourni Mech-Eye SDK. Visitez Centre de téléchargement Mech-Mind pour télécharger et installer la dernière version de Mech-Eye SDK.
Utiliser Mech-Eye SDK
Via Mech-Eye SDK, vous pouvez vous connecter au produit et le contrôler pour acquérir des images et des nuages de points. Il est recommandé de vérifier la précision du produit en vérifiant les paramètres intrinsèques via Mech-Eye SDK avant d’utiliser le produit pour acquérir des données pour la première fois.
|
Lorsque vous vous connectez au produit dans Mech-Eye SDK pour la première fois, il se peut que vous deviez mettre à niveau le micrologiciel du produit. |
Maintenance
Inspections régulières
La caméra est un instrument de précision. Veuillez effectuer les inspections suivantes régulièrement afin de vous assurer que la caméra est dans des conditions de fonctionnement optimales.
Vérifier les conditions externes
| Inspection | Mesure corrective | Fréquence recommandée |
|---|---|---|
Si le boîtier est usé, rayé ou déformé. |
|
Une fois par jour |
Si la vitre de l’objectif présente des traces d’eau ou de la condensation. |
Contactez l’assistance technique ou retournez le produit à Mech-Mind pour réparation. |
Vérifier les câbles
| Inspection | Mesure corrective | Fréquence recommandée |
|---|---|---|
Si les câbles sont correctement connectés aux appareils. |
Sécuriser la connexion. |
Une fois par jour |
Si les câbles sont pliés ou tordus. |
Améliorez le cheminement des câbles afin d’éviter une flexion ou une torsion excessive des câbles. Le rayon de courbure ne doit pas être inférieur à 8 fois le diamètre extérieur du câble (8D). |
|
Si les câbles sont vieillissants, usés ou déchirés. |
Contactez Mech-Mind pour obtenir un remplacement. |
|
Si des câbles dégagent une odeur de brûlé. |
Contactez Mech-Mind pour remplacer le câble et identifier l’emplacement et la cause de l’odeur de brûlé afin d’éviter toute récurrence. |
Vérifier le support de caméra
| Inspection | Mesure corrective | Fréquence recommandée |
|---|---|---|
Si le support de caméra vacille et si les vis sont desserrées. |
Serrez les vis. |
Une fois toutes les 2 semaines |
Si le support de caméra est déformé. |
La caméra a peut-être subi une collision. Vérifiez les paramètres intrinsèques via Mech-Eye SDK. Si les paramètres intrinsèques ont changé, cessez d’utiliser la caméra et contactez Mech-Mind. |
Vérifier les paramètres intrinsèques
| Inspection | Mesure corrective | Fréquence recommandée |
|---|---|---|
Vérifiez, via Mech-Eye SDK, si les erreurs des paramètres intrinsèques sont importantes. |
Corrigez les paramètres intrinsèques. Si, après correction, les erreurs restent importantes, veuillez contacter Mech-Mind. |
Une fois tous les 6 mois |
Nettoyage
Débranchez le produit de l’alimentation avant le nettoyage. Lors du nettoyage de la surface du produit, utilisez un chiffon doux et propre pour essuyer délicatement la poussière et les débris. Pour nettoyer les fenêtres, afin d’éviter les rayures, vous pouvez utiliser un chiffon doux, propre et non pelucheux avec un nettoyant pour objectifs ou pour verre pour essuyer soigneusement les fenêtres. Il est recommandé de nettoyer le produit une fois par jour.
|
Stockage
-
LSR S-GL: Le produit est classé IP67. Le boîtier du produit peut empêcher la poussière et l’eau de pénétrer et d’affecter les fonctions du produit. Veuillez éviter d’immerger le produit dans l’eau ou de le placer à l’extérieur pendant une longue période. En cas de non-utilisation, veuillez stocker le produit dans un endroit intérieur, sec, frais et bien ventilé. La température de stockage du produit est de -20–60°C.
-
Modèles autres que LSR S-GL: Le produit est classé IP65. Le boîtier du produit peut empêcher la poussière de pénétrer et d’affecter les fonctions du produit. Veuillez éviter d’immerger le produit dans l’eau, de l’installer dans un environnement très humide ou de le placer à l’extérieur pendant une longue période. En cas de non-utilisation, veuillez stocker le produit dans un endroit intérieur, sec, frais et bien ventilé. La température de stockage du produit est de -20–60°C.
|
Transport
Lors du transport du produit, veuillez utiliser l’emballage d’origine afin d’assurer une protection suffisante du produit et d’éviter les dommages induits par le processus de transport.
Dépannage
Pour plus d’informations sur les problèmes courants et des conseils de dépannage, voir Dépannage.
Clause de non-responsabilité
Il est fortement recommandé d’utiliser l’alimentation électrique et les câbles fournis par Mech-Mind afin de garantir la conformité aux normes de sécurité et CEM. Mech-Mind ne saurait être tenue responsable de tout problème causé par l’utilisation d’une alimentation électrique et de câbles fournis par un tiers.
Déclaration relative aux marques et aux aspects juridiques
Les logos Mech-Mind et de la série Mech-Mind, y compris ![]() , sont des marques déposées de Mech-Mind Robotics Technologies Co., Ltd. et d’autres entités affiliées.
, sont des marques déposées de Mech-Mind Robotics Technologies Co., Ltd. et d’autres entités affiliées.
© Copyright 2026, Mech-Mind Robotics Technologies Co., Ltd.
Sauf autorisation écrite préalable de Mech-Mind Robotics Technologies Co., Ltd. (« Mech-Mind »), aucune partie des marques ne peut être utilisée, reproduite, modifiée, transmise, transcrite, ou utilisée ou vendue avec d’autres produits dans le cadre d’une offre groupée, par quelque entité ou individu que ce soit, sous quelque forme que ce soit et pour quelque raison que ce soit.
Toute atteinte aux droits de marque de Mech-Mind sera sanctionnée conformément à la loi.
Mech-Mind se réserve tous les droits relatifs au présent manuel d’utilisation. Conformément aux lois sur le droit d’auteur, sauf autorisation de Mech-Mind, le présent manuel d’utilisation ne peut être reproduit, modifié ou diffusé, en tout ou partie, par quelque entité ou individu que ce soit. Les utilisateurs ayant acheté et utilisant le produit peuvent télécharger, imprimer ou copier le manuel d’utilisation pour un usage personnel ou pour une utilisation au sein de l’organisation à laquelle ils appartiennent. Sauf autorisation de Mech-Mind, le contenu du manuel d’utilisation ne peut pas être utilisé à d’autres fins.