C++ (Windows)
Ce sujet présente comment configurer les exemples C++ de Mech-Eye API avec CMake, puis compiler les exemples avec Visual Studio sur Windows.
Liste des exemples
Les exemples sont répartis dans les catégories suivantes : Basique, Avancé, Utilitaire, Calibration, PCL et HALCON.
-
Basic exemples: Se connecter et acquérir des données.
-
Advanced exemples: Acquérir des données de manière plus complexe et définir des paramètres spécifiques au modèle.
-
Util exemples: Obtenir les informations de la caméra et définir des paramètres communs.
-
Calibration exemples: Effectuer l’étalonnage main-œil avec Mech-Eye API.
-
Pcl exemples: Utiliser la bibliothèque PCL pour convertir la structure de données et visualiser les données.
-
Halcon: obtenir des nuages de points lisibles par HALCON via Mech-Eye API.
The samples in each category and their descriptions are provided below.
Basic
-
ConnectToCamera: Se connecter à une caméra.
-
ConnectAndCaptureImages: Se connecter à une caméra et obtenir l’image 2D, la carte de profondeur et les données de nuage de points.
-
Capture2DImage: Obtenir et enregistrer l’image 2D.
-
CaptureDepthMap: Obtenir et enregistrer la carte de profondeur.
-
CapturePointCloud: Obtenir et enregistrer les nuages de points non texturés et texturés.
-
CapturePointCloudHDR: Définir plusieurs temps d’exposition, puis obtenir et enregistrer le nuage de points.
-
CapturePointCloudWithNormals: Calculer les normales et enregistrer le nuage de points avec des normales.
-
SaveVirtualDevice: Enregistrer les données acquises par la caméra en tant que fichier de périphérique virtuel.
Advanced
-
ConvertDepthMapToPointCloud: Générer un nuage de points à partir de la carte de profondeur et enregistrer le nuage de points.
-
MultipleCamerasCaptureSequentially: Obtenir et enregistrer des images 2D, des cartes de profondeur et des nuages de points de manière séquentielle depuis plusieurs caméras.
-
MultipleCamerasCaptureSimultaneously: Obtenir et enregistrer simultanément des images 2D, des cartes de profondeur et des nuages de points depuis plusieurs caméras.
-
CapturePeriodically: Obtenir et enregistrer périodiquement, pendant la durée spécifiée, des images 2D, des cartes de profondeur et des nuages de points depuis une caméra.
-
Mapping2DImageToDepthMap: Générer des nuages de points non texturés et texturés à partir d’une image 2D masquée et d’une carte de profondeur.
-
RenderDepthMap: Obtenir et enregistrer la carte de profondeur rendue avec la palette de couleurs jet.
-
TransformPointCloud: Obtenir et enregistrer les nuages de points dans le repère personnalisé.
-
SetParametersOfLaserCameras: Définir les paramètres spécifiques aux caméras laser (les séries DEEP et LSR).
-
SetParametersOfUHPCameras: Définir les paramètres spécifiques à la série UHP.
-
RegisterCameraEvent: Définir et enregistrer la fonction de rappel pour surveiller les événements de la caméra.
-
WarmUp: Préchauffer l’appareil.
-
CaptureStereo2DImages: Obtenir les images 2D des deux caméras 2D de Laser L Enhanced, LSR L-GL, LSR S-GL, NANO ULTRA-GL, et DEEP-GL.
Util
-
GetCameraIntrinsics: Obtenir et afficher les paramètres intrinsèques de la caméra.
-
PrintCameraInfo: Obtenir et afficher les informations de la caméra, telles que le modèle, le numéro de série, la version du firmware et les températures.
-
SetScanningParameters: Définir les paramètres dans les catégories Paramètres 3D, Paramètres 2D et ROI.
-
SetDepthRange: Définir le paramètre Plage de profondeur.
-
SetPointCloudProcessingParameters: Définir les paramètres de Traitement du nuage de points.
-
ManageUserSets: Gérer des groupes de paramètres, par exemple obtenir les noms de tous les groupes de paramètres, ajouter un groupe de paramètres, changer de groupe de paramètres et enregistrer des réglages de paramètres dans le groupe de paramètres.
-
SaveAndLoadUserSet: Importer et remplacer tous les groupes de paramètres depuis un fichier JSON, et enregistrer tous les groupes de paramètres dans un fichier JSON.
Calibration
-
HandEyeCalibration: Effectuer l’étalonnage main-œil.
Pcl
-
ConvertPointCloudToPcl: Obtenir les données de nuage de points depuis la caméra et les convertir vers la structure de données PCL.
-
ConvertPointCloudWithNormalsToPcl: Obtenir les données de nuage de points avec normales depuis la caméra et les convertir vers la structure de données PCL.
Halcon
-
ConvertPointCloudToObjectModel3D: Obtenir les données de nuage de points depuis une caméra, puis transformer et enregistrer les nuages de points à l’aide de l’interface C++ HALCON.
Prérequis
Afin d’utiliser les exemples C++ de Mech-Eye API, les prérequis suivants doivent être satisfaits :
-
Obtenez les exemples.
-
Installez les logiciels requis.
-
(Optionnel) Installez les bibliothèques logicielles dont dépendent les exemples et ajoutez les variables d’environnement pertinentes.
Obtenir les exemples
Les exemples C++ sont inclus dans le chemin d’installation de Mech-Eye SDK ou peuvent être obtenus en clonant depuis GitHub. Les exemples dans le chemin d’installation correspondent à la version au moment de la sortie de Mech-Eye SDK. La version sur GitHub peut contenir les dernières modifications.
-
Les exemples dans le chemin d’installation se trouvent dans xxx/Mech-Eye SDK-2.5.4/API/samples/cpp/area_scan_3d_camera.
-
Les exemples clonés depuis GitHub se trouvent dans xxx/mecheye_cpp_samples/area_scan_3d_camera.
Installer les logiciels requis
Afin d’utiliser les exemples C++ de Mech-Eye API, Mech-Eye SDK, CMake et Visual Studio doivent être installés.
Installer la dernière version de Mech-Eye SDK
Veuillez installer ou mettre à jour Mech-Eye SDK conformément à Guide d’installation de Mech-Eye SDK.
Installer CMake (version 3.2 ou supérieure)
-
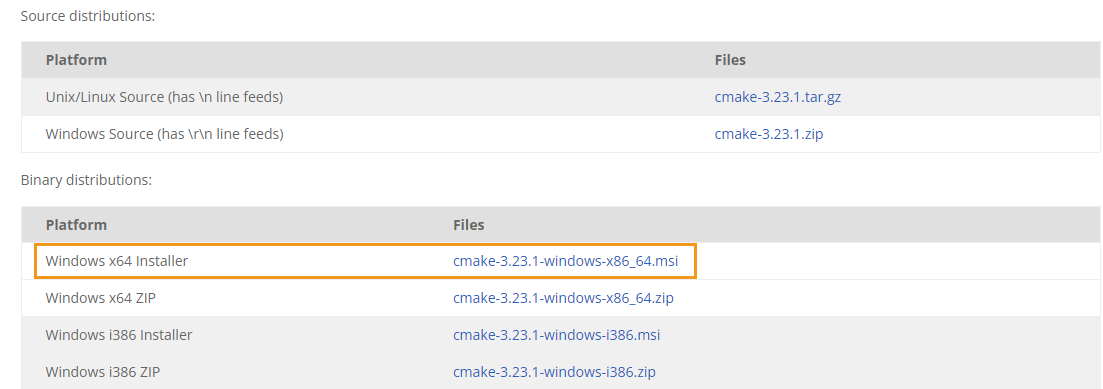
Lien de téléchargement CMake: téléchargez l’installateur situé à droite de Windows x64 Installer.
-
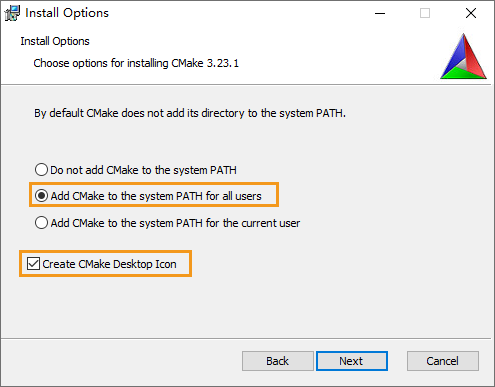
Lors de l’installation, sélectionnez les deux options suivantes pour ajouter CMake aux variables d’environnement et créer un raccourci sur le bureau pour CMake.
-
Ajouter CMake au PATH système pour tous les utilisateurs
-
Créer l’icône Cmake sur le bureau
-
Installer Visual Studio (version 2017 ou supérieure)
-
Téléchargez le programme d’installation de Visual Studio.
-
Lors de l’installation, sélectionnez les deux charges de travail suivantes dans la catégorie Bureau et mobile, puis cliquez sur Installer.
-
Développement pour le bureau avec C++
-
Développement de la plateforme Windows universelle
-
| Veuillez redémarrer votre ordinateur après avoir installé Visual Studio. Si vous devez encore installer les bibliothèques logicielles optionnelles, vous pouvez redémarrer votre ordinateur après avoir ajouté les variables d’environnement. |
(Optionnel) Installer les bibliothèques logicielles dépendantes
Certains exemples contiennent des fonctions qui dépendent des bibliothèques logicielles tierces suivantes. Si vous devez utiliser les exemples listés dans le tableau ci-dessous, vous devez installer les bibliothèques logicielles dont dépendent les exemples.
-
OpenCV : version 3.4.5 ou supérieure
-
PCL : version 1.8.1 ou supérieure
-
HALCON : version 20.11 ou supérieure
Les versions de HALCON inférieures à 20.11 n’ont pas été entièrement testées.
| Si l’une des bibliothèques logicielles optionnelles n’est pas installée, vous devez compléter les étapes décrites dans Désactiver les exemples inutiles (optionnel) avant de configurer les exemples. |
Référez-vous au tableau suivant pour les exemples qui dépendent des bibliothèques logicielles tierces.
| Exemple | OpenCV | PCL | HALCON |
|---|---|---|---|
Capture2DImage |
√ |
||
CaptureDepthMap |
√ |
||
MultipleCamerasCaptureSequentially |
√ |
||
MultipleCamerasCaptureSimultaneously |
√ |
||
CapturePeriodically |
√ |
||
CaptureStereo2DImages |
√ |
||
HandEyeCalibration |
√ |
||
RenderDepthMap |
√ |
||
ConvertPointCloudToObjectModel3D |
√ |
||
ConvertPointCloudToPcl |
√ |
||
ConvertPointCloudWithNormalsToPcl |
√ |
Installer OpenCV
-
Téléchargez et installez OpenCV. Notez le chemin d’installation d’OpenCV.
-
Ajoutez OpenCV aux variables d’environnement. Reportez-vous à Ajouter des variables d’environnement pour les instructions.
Installer PCL
-
Reportez-vous au tableau suivant et déterminez la version de PCL à installer en fonction de la version de Visual Studio.
Version de Visual Studio Versions de PCL prises en charge 2017
1.8.1–1.9.1
2019
1.8.1–1.12.1
2022
1.8.1 et supérieure
-
Ouvrez le page de téléchargement de PCL, cliquez sur Assets sous la version correspondante et téléchargez l’installateur EXE.
-
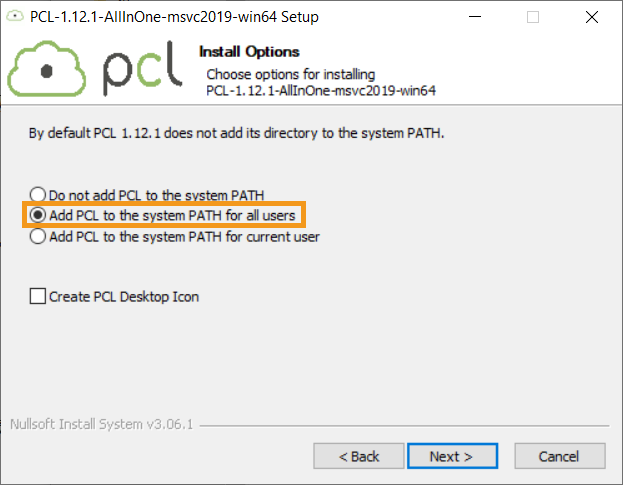
Exécutez l’installateur pour installer PCL. Lors de l’installation, sélectionnez Add PCL to the system PATH for all users pour ajouter PCL aux variables d’environnement.
Le message d’erreur suivant peut apparaître pendant l’installation :
Warning! PATH too long installer unable to modify PATH!
Dans ce cas, vous devez ajouter PCL aux variables d’environnement manuellement. Reportez-vous à Ajouter des variables d’environnement pour les instructions.
-
Ajoutez OpenNI2, dont PCL dépend, aux variables d’environnement. Reportez-vous à Ajouter des variables d’environnement pour les instructions.
Installer HALCON
Installez HALCON 20.11 ou supérieure. Veuillez confirmer que votre licence HALCON est toujours valide.
Ajouter des variables d’environnement
Si vous devez utiliser des exemples qui dépendent d’OpenCV ou de PCL, veuillez ajouter les variables d’environnement pertinentes selon les étapes suivantes.
-
Faites un clic droit sur Ce PC sur le bureau et sélectionnez Propriétés.
-
Cliquez sur Paramètres système avancés, et dans la fenêtre Propriétés système qui s’affiche, cliquez sur Variables d’environnement pour ouvrir la fenêtre Variables d’environnement.
-
Double-cliquez sur Path dans les variables utilisateur pour accéder à la page Éditer la variable d’environnement. Cliquez sur Nouveau en haut à droite et ajoutez les chemins suivants un par un. Ensuite, cliquez sur OK pour fermer la fenêtre.
-
Pour PCL : C:/Program Files/OpenNI2/Tools
-
Pour OpenCV :
-
xxx/OpenCV/build/x64/vc14/bin
-
xxx/OpenCV/build/x64/vc14/lib
-
-
Si vous avez rencontré le message d’erreur lors de l’installation de PCL, veuillez ajouter également le chemin suivant :
-
xxx/PCL 1.12.1/bin
-
xxx/PCL 1.12.1/3rdParty/VTK/bin
-
-
| Il est recommandé de redémarrer votre ordinateur après avoir ajouté les variables d’environnement. En l’absence de redémarrage, les variables ajoutées peuvent ne pas être prises en compte. |
Compiler et exécuter les exemples
Vous pouvez compiler tous les exemples en une seule fois ou compiler un exemple individuel.
| Les chemins fournis dans cette section correspondent aux exemples inclus dans le chemin d’installation. Si vous utilisez les exemples clonés depuis GitHub, veuillez modifier les chemins en conséquence. |
Désactiver les exemples inutiles (optionnel)
| Si vous n’avez pas installé certaines des bibliothèques logicielles optionnelles et souhaitez tout de même compiler tous les exemples en une seule fois, vous devez compléter les étapes de cette section. Sinon, une erreur se produira lors de la configuration des exemples avec CMake. |
Si vous n’avez pas besoin des exemples qui dépendent d’OpenCV, de PCL ou de HALCON, veuillez éditer le fichier CMakeLists pour désactiver ces exemples avant de compiler tous les exemples en une seule fois.
-
Ouvrez CMakeLists.txt dans xxx/Mech-Eye SDK-2.5.4/API/samples/cpp/area_scan_3d_camera.
-
Éditez les lignes contenant
options: trouvez les lignes commençant paroptions, changezONà la fin de la ligne enOFFpour désactiver les exemples qui dépendent de la bibliothèque logicielle mentionnée dans cette ligne.Exemple : si vous n’avez pas besoin de compiler l’exemple qui dépend de HALCON, changez
ONà la fin de la ligneoption(USE_HALCON…)enOFF. -
Enregistrez les modifications et fermez CMakeLists.txt.
Configurer les exemples dans CMake
-
Faites un clic droit sur CMake et sélectionnez Exécuter en tant qu’administrateur.
-
Saisissez les chemins du code source et des binaires.
-
Pour compiler tous les exemples en une seule fois, saisissez les chemins suivants.
Où se trouve le code source
xxx/Mech-Eye SDK-2.5.4/API/samples/cpp/area_scan_3d_camera
Où générer les fichiers binaires
xxx/Mech-Eye SDK-2.5.4/API/samples/cpp/area_scan_3d_camera/build
-
Pour compiler un exemple individuellement, saisissez les chemins suivants. Remplacez Category par le nom de catégorie de l’exemple et SampleName par le nom de l’exemple.
Où se trouve le code source
xxx/Mech-Eye SDK-2.5.4/API/samples/cpp/area_scan_3d_camera/Category/SampleName
Où générer les fichiers binaires
xxx/Mech-Eye SDK-2.5.4/API/samples/cpp/area_scan_3d_camera/Category/SampleName/build
-
-
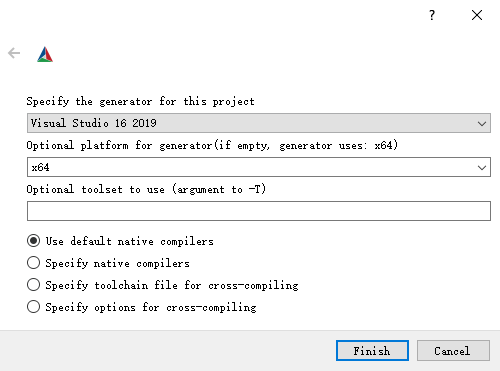
Cliquez sur Configure en bas pour ouvrir la page de configuration. Sélectionnez la version de Visual Studio et définissez la plateforme sur x64. Ensuite, cliquez sur Finish. Lorsque la configuration est terminée, le journal affiche Configuring done.
-
Cliquez sur Generate pour générer la solution Visual Studio. Lorsque la génération est terminée, le journal affiche Generating done. Ensuite, cliquez sur Open Project pour ouvrir la solution dans Visual Studio.
Compiler les exemples dans Visual Studio
-
Dans la barre d’outils de Visual Studio, changez la configuration de la solution de Debug à Release.
-
Dans la barre de menu, sélectionnez . Un fichier exécutable (.exe) est généré pour chaque exemple. Les fichiers exécutables sont enregistrés dans le dossier Release, situé dans le répertoire Where to build the binaries que vous avez saisi dans CMake.
Exécuter les exemples
Vous pouvez exécuter les exemples dans Visual Studio après les avoir compilés, ou exécuter les exemples en double-cliquant sur les fichiers exécutables.
Exécuter un exemple dans Visual Studio
-
Dans le panneau Explorateur de solutions, faites un clic droit sur un exemple et sélectionnez Définir comme projet de démarrage.
-
Cliquez sur Débogueur Windows local dans la barre d’outils pour exécuter l’exemple.
Pendant l’exécution de l’exemple, saisissez l’index du Caméra auquel vous souhaitez vous connecter selon l’instruction, puis appuyez sur Entrée pour vous connecter au Caméra.
-
Si des fichiers image et/ou de nuage de points sont enregistrés par l’exemple, vous pouvez trouver les fichiers dans le dossier build (le répertoire Where to build the binaries que vous avez saisi dans CMake).
Exécuter le fichier exécutable d’un exemple
-
Accédez au répertoire Where to build the binaries que vous avez saisi dans CMake et ouvrez le dossier Release.
-
Exécutez le fichier exécutable portant le même nom que l’exemple.
Pendant l’exécution de l’exemple, saisissez l’index du Caméra auquel vous souhaitez vous connecter selon l’instruction, puis appuyez sur Entrée pour vous connecter au Caméra.
-
Si des fichiers image et/ou de nuage de points sont enregistrés par l’exemple, vous pouvez trouver les fichiers dans le dossier Release.