Exactitude de la caméra
Ce sujet présente les indicateurs utilisés pour évaluer l’exactitude de la caméra et les facteurs susceptibles de l’affecter.
Évaluer l’exactitude de la caméra
L’exactitude de la caméra se divise en exactitude absolue et répétabilité. Les sections suivantes présentent ces deux indicateurs d’exactitude.
Exactitude absolue
L’exactitude absolue d’une caméra évalue la justesse des données acquises par la caméra. Cet indicateur est testé en se référant à la méthode décrite dans la norme VDI/VDE 2634 Partie 2. Le résultat du test est fourni comme exactitude de mesure (VDI/VDE) dans les spécifications techniques de la caméra.
La méthode d’essai est la suivante :
-
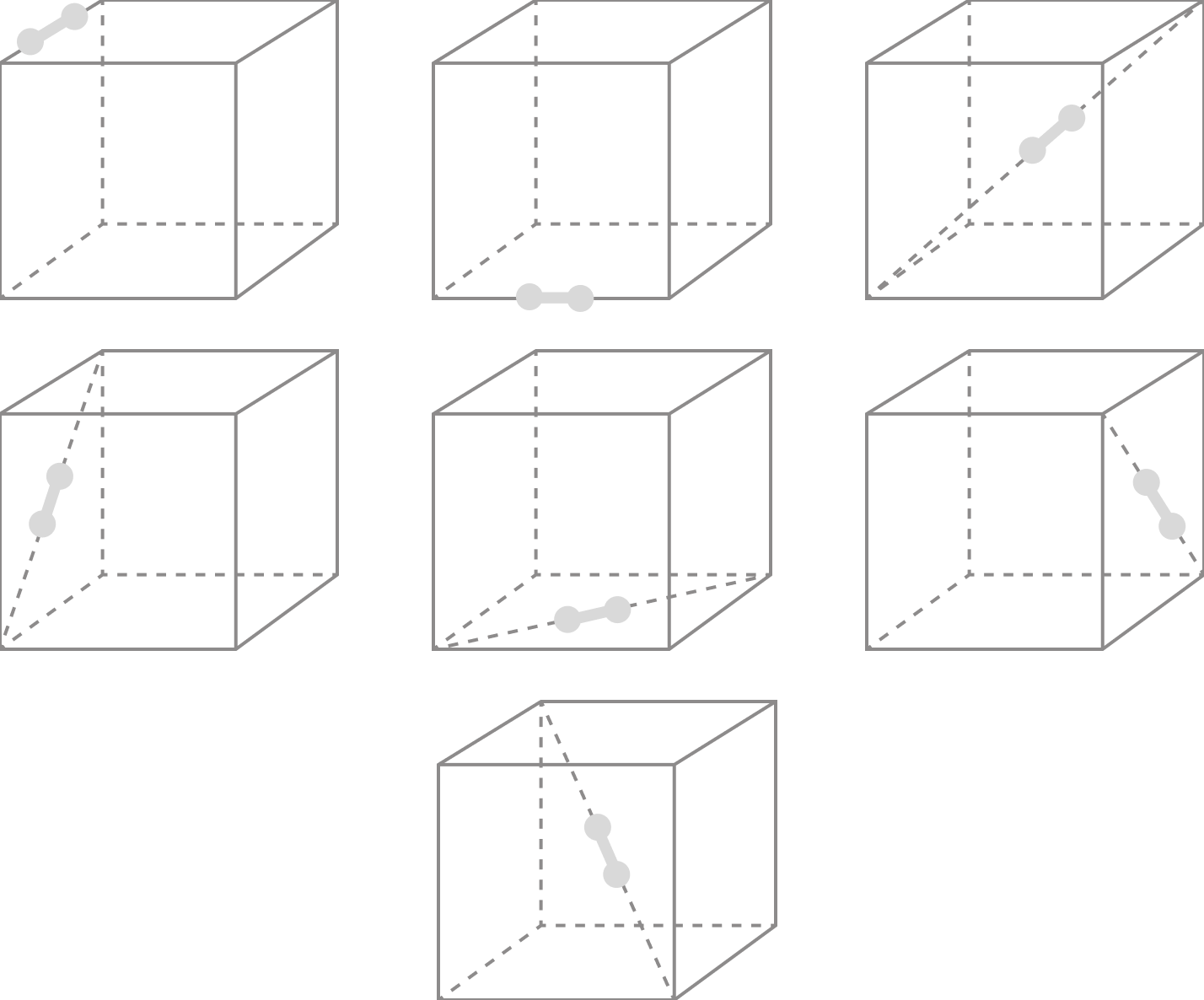
Utiliser une jauge étalon en céramique comme objet cible. La jauge a la forme d’un haltère, composée de deux sphères reliées par une courte tige.
-
Placer la jauge à 7 positions prédéfinies dans un espace 3D de taille prédéfinie (comme illustré ci-dessous) et acquérir les données de nuage de points de la jauge à chaque position à l’aide de la caméra.
-
Trouver les surfaces des sphères qui s’ajustent au mieux aux données du nuage de points et calculer les coordonnées des centres des sphères. Calculer ensuite la distance entre les deux centres (il s’agit de la valeur mesurée de la distance entre centres).
-
Calculer la différence entre la valeur mesurée et la valeur vraie de la distance entre centres. Diviser ensuite cette différence par la valeur vraie de la distance entre centres. Utiliser le résultat comme l’erreur de la distance entre centres. Prendre la valeur maximale parmi les 7 erreurs de la distance entre centres comme l’exactitude absolue.
Répétabilité
La répétabilité d’une caméra comprend la répétabilité de la valeur Z ponctuelle et la répétabilité de la valeur Z régionale. Les valeurs sont indiquées dans les spécifications techniques de la caméra.
-
Répétabilité de la valeur Z ponctuelle (1σ) : évalue la répétabilité des données de profondeur (valeur Z) d’un pixel unique acquis par la caméra.
La méthode d’essai est la suivante :
-
Utiliser comme objet cible une plaque en céramique blanche à surface rugueuse qui réfléchit principalement la lumière de manière diffuse.
-
Acquérir les données de la plaque céramique 100 fois à différentes distances de travail, respectivement.
-
Pour chaque distance de travail, calculer l’écart type des 100 valeurs de profondeur mesurées de chaque pixel dans la région testée sur la plaque céramique. Prendre la médiane de tous les écarts types comme la répétabilité de la valeur Z ponctuelle à cette distance de travail.
-
-
Répétabilité de la valeur Z régionale (1σ) : évalue la répétabilité des données de profondeur d’une région plane acquise par la caméra. Seul UHP-140-GL fournit cet indicateur.
La méthode d’essai est la suivante :
-
Utiliser comme objet cible une plaque en céramique blanche à surface rugueuse qui réfléchit principalement la lumière de manière diffuse.
-
Acquérir les données de la plaque céramique 100 fois à différentes distances de travail, respectivement.
-
Déterminer deux régions de taille 200 × 200 pixels sur la carte de profondeur de la plaque céramique. Pour la carte de profondeur obtenue à chaque acquisition, calculer la moyenne des données de profondeur au sein de chaque région, puis calculer la différence entre les deux moyennes.
-
Pour chaque distance de travail, calculer l’écart type des 100 différences comme la répétabilité de la valeur Z régionale à cette distance de travail.
-
Facteurs affectant l’exactitude de la caméra
L’exactitude de la caméra peut être affectée par les facteurs suivants :
-
Problèmes matériels de la caméra : la caméra dans son ensemble ou ses composants (tels que le projecteur et le capteur d’image) sont défectueux ou endommagés. Des collisions avec d’autres dispositifs peuvent entraîner un dysfonctionnement ou des dommages de la caméra.
-
Facteurs ambiants : des facteurs tels que les conditions d’éclairage, la température, l’humidité et les vibrations peuvent affecter les performances de la caméra. Parmi eux, la température peut entraîner une dérive thermique.
-
Déformation mécanique : si la structure sur laquelle la caméra est montée est déformée ou oscille, la position de la caméra devient instable, ce qui affecte alors l’exactitude.
La répétabilité diminue également à mesure que la distance de travail augmente. Voir les courbes Répétabilité de la valeur Z ponctuelle dans lesspécifications techniques de la caméra.
Dérive thermique
La dérive thermique désigne le phénomène selon lequel la variation de la température de la caméra entraîne une variation des données de coordonnées sorties par la caméra. À différentes températures, les composants optiques à l’intérieur de la caméra (tels que le projecteur et les lentilles) changent de structure et de position en raison de la dilatation et de la contraction thermiques. Les données de coordonnées générées sur la base du principe de triangulation changent alors également.
Les variations de température à l’origine de la dérive thermique proviennent de deux sources :
-
Intérieur de la caméra : après la mise sous tension de la caméra, les composants internes génèrent de la chaleur, ce qui augmente la température de la caméra.
Lorsque la température ambiante reste inchangée, la chaleur générée à l’intérieur de la caméra et celle dissipée vers l’environnement entourant finissent par stabiliser la température de la caméra (atteinte de l’équilibre thermique).
-
Environnement extérieur : la température de la caméra varie au gré des variations de la température ambiante.
Après que la caméra a atteint l’équilibre thermique, si la température ambiante change, la température de la caméra changera de nouveau.
La dérive thermique affecte l’exactitude absolue et la répétabilité de la caméra et, par conséquent, les données de coordonnées sorties par la caméra peuvent ne pas satisfaire aux exigences du projet. Veuillez mettre en œuvre les mesures suivantes pour réduire l’influence de la dérive thermique.
-
Préchauffage : avant d’effectuer l’étalonnage main-œil, de vérifier et de corriger les paramètres intrinsèques, et d’utiliser la caméra pour acquérir des données, utilisez l’Outil de préchauffage pour préchauffer d’abord la caméra afin qu’elle atteigne l’équilibre thermique.
-
Contrôler la température ambiante : maintenir une température ambiante stable pour éviter que la température de la caméra change avec la température ambiante, ce qui entraînerait une dérive thermique.
-
Déployer la fonctionnalité Correction automatique de la dérive de précision dans le système de vision : pour les applications robotiques guidées par vision 3D, cette fonctionnalité aide à améliorer la stabilité et la fiabilité, y compris en répondant à la dérive thermique.