DEEP-GL
Spécifications physiques
Modèle |
DEEP-GL |
|---|---|
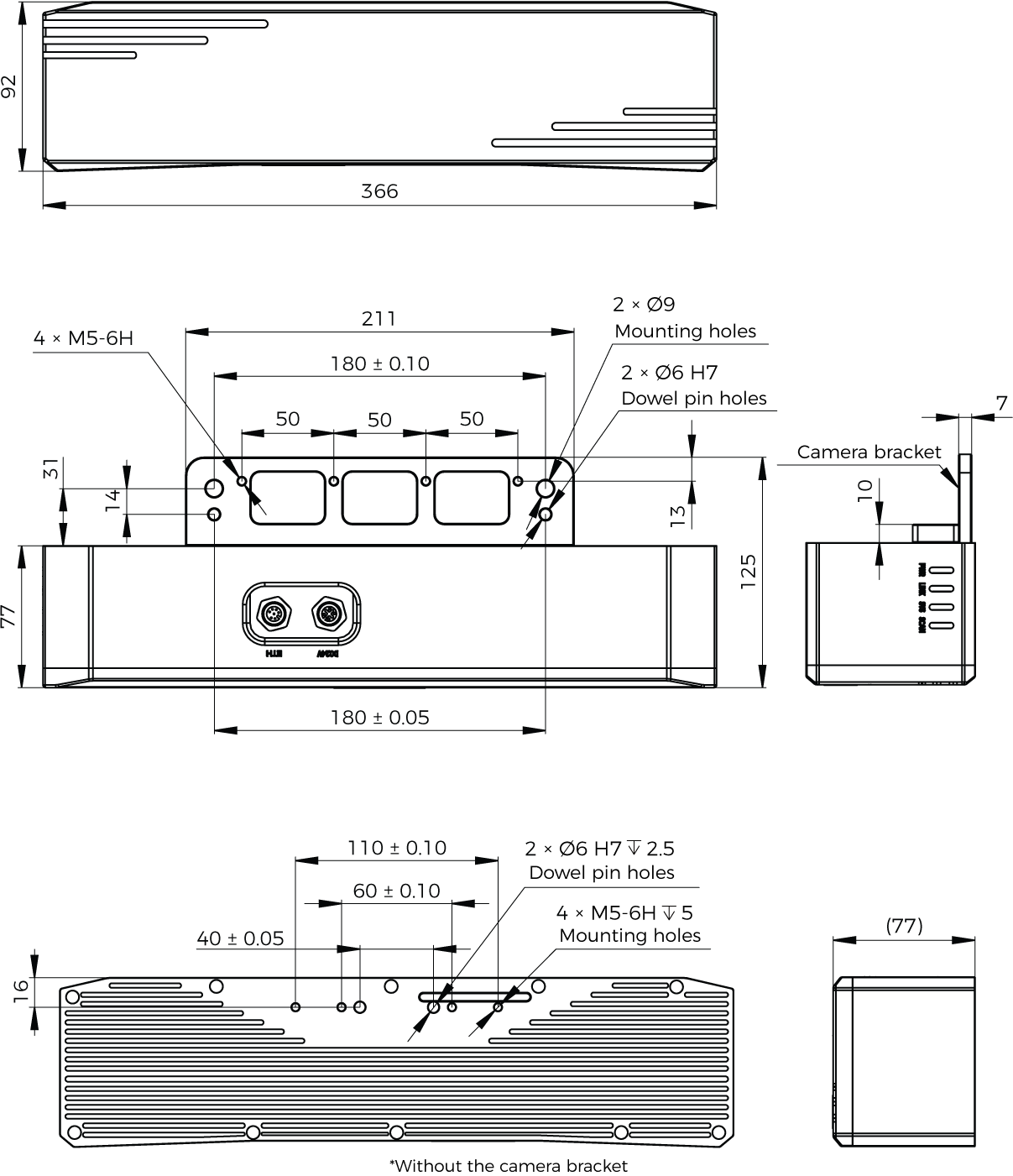
Dimensions |
366 × 77 × 92 mm |
Poids |
2.4 kg |
Distance de base |
300 mm |
Source lumineuse |
Laser rouge (638 nm, Classe 2) |
Température de fonctionnement |
-10–45°C |
Humidité de fonctionnement |
0–85%RH, sans condensation |
Température de stockage |
-20–60°C |
Interface de communication |
Gigabit Ethernet |
Entrée |
24 VDC, 3.75 A |
Puissance |
Veille: 22 W Moyenne: 30 W Crête: 60 W |
Indice IP(1) |
IP65 |
Refroidissement |
Passif |
Tolérance de planéité de la surface de montage(2) |
± 0.05 mm |
Résistance aux vibrations(3) |
Vibration sinusoïdale le long des axes X, Y et Z, 10–57 Hz, valeur crête à crête de 1.5 mm, 3 heures par axe |
Résistance aux chocs(4) |
Impulsions de choc en demi-sinus le long des directions positive et négative des axes X, Y et Z, 147 m/s2 (15 g), 11 ms, 3 chocs par direction, 18 chocs au total |
(1) Essai réalisé selon la norme IEC 60529. 6 : étanche à la poussière ; 5 : étanche à l’eau.
(2) La planéité de la surface utilisée pour monter la caméra doit satisfaire à cette exigence.
(3) Essai réalisé selon IEC 60068-2-6.
(4) Essai réalisé selon IEC 60068-2-27.
Spécifications de performance
Distance de travail |
1200–3500 mm |
|---|---|
Distance de travail recommandée |
1800–3200 mm |
Distance de mise au point de l’objet(1) |
2500 mm |
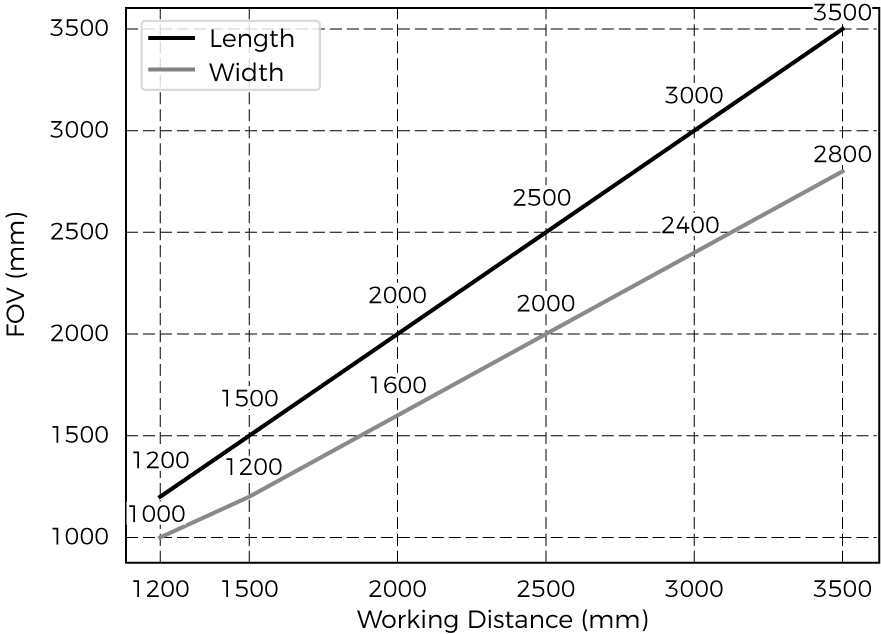
Champ de vision (proche) |
1200 × 1000 mm @ 1.2 m |
Champ de vision (éloigné) |
3500 × 2800 mm @ 3.5 m |
Résolution de la carte de profondeur(2) |
2048 × 1536 |
Résolution de l’image RVB(3) |
2000 × 1500 |
Temps de capture typique(4),(5) |
0.5–0.9 s |
Temps de préchauffage recommandé(4),(6) |
30 min |
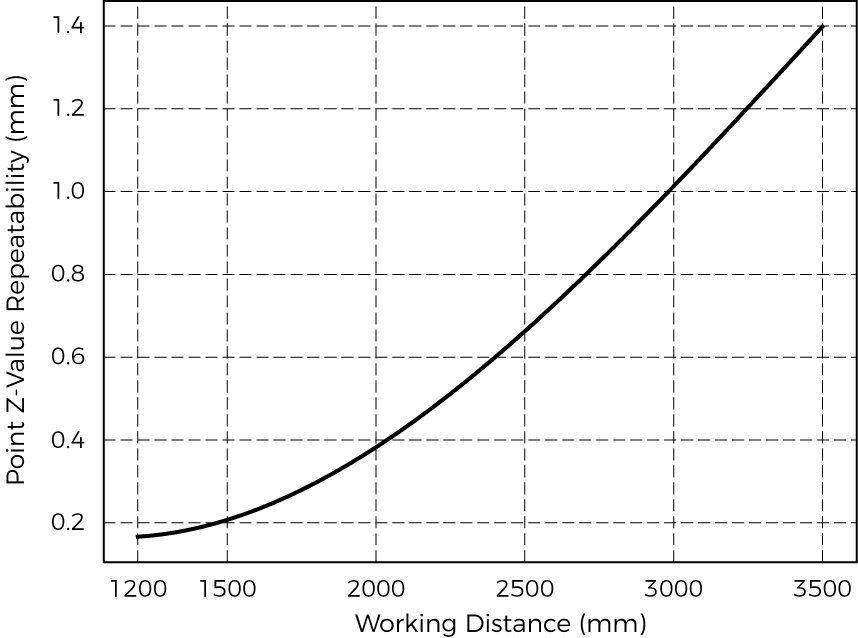
Répétabilité de la valeur Z du point (1σ)(4),(7) |
1.0 mm @ 3.0 m |
Précision de mesure (VDI/VDE)(4),(8) |
3.0 mm @ 3.0 m |
(1) La distance de mise au point de l’objet de la caméra 2D à l’intérieur du produit.
(2) Peut être modifiée en 1024 × 768 via Mech-Eye Viewer.
(3) Image RVB désigne l'image 2D (texture) dans Mech-Eye Viewer.
(4) Sauf indication contraire, cet essai a été réalisé dans les conditions d’essai standard.
(5) Plage de temps nécessaire pour acquérir les données de profondeur dans le mode de codage à franges Rapide et Précis.
(6) Le temps de préchauffage recommandé requis pour garantir l’exactitude des données aux valeurs indiquées. Veuillez utiliser l’Outil de préchauffage pour préchauffer le produit, et ajuster le temps de préchauffage en fonction de l’intervalle réel d’acquisition des données, de la température ambiante et des conditions de dissipation thermique.
(7) L’écart-type des 100 valeurs de profondeur mesurées pour chaque point de l’objet cible a été calculé, puis la médiane de tous les écarts-types a été prise. L’objet cible était une plaque céramique blanche en alumine 95% avec une surface rugueuse. Les paramètres Point Cloud Processing ont été réglés sur Désactivé.
(8) Essai réalisé en référence à VDI/VDE 2634 Partie 2.
Certifications
Sécurité des produits laser
La classification du laser est mise en œuvre sur la base de l’IEC 60825-1:2014, conformément aux exigences de la Laser Notice n° 56 de la FDA (CDRH).
Modèle |
Longueur d’onde |
Puissance de sortie max. |
Classe laser |
|---|---|---|---|
DEEP-GL |
638 nm |
2.46 mW |
Classe 2 |
CE
Par la présente, [Mech-Mind Robotics Technologies Co., Ltd.] déclare que [DEEP-GL] est conforme à la Directive 2014/30/UE relative à la compatibilité électromagnétique.
Le texte intégral de la Déclaration de conformité UE est disponible à https://downloads.mech-mind.com/?tab=tab-eu-dec
Conditions d’essai standard
Distance de travail |
1800–3200 mm |
||
|---|---|---|---|
Température ambiante |
15–30°C |
||
Humidité ambiante |
0–85%RH, sans condensation |
||
Lumière ambiante |
200–1000 lx |
||
Paramètres de la caméra(1) |
8 ms |
||
Temporisé (Temps d’exposition: 20 ms) |
|||
Flash (Mode d’acquisition par flash: Rapide) |
|||
0 dB |
|||
100% |
|||
Précis |
|||
Normal |
|||
Normal |
|||
Normal |
|||
Zone testée(2) |
Longueur: 90% de la longueur du champ de vision Largeur: 90% de la largeur du champ de vision Position: centre du champ de vision |
||
Résolution de la carte de profondeur |
2048 × 1536 |
||
(1) Les paramètres non indiqués sont réglés sur leurs valeurs par défaut.
(2) Les données d’essai ont été obtenues dans cette zone.