Paramètres de LSR S-GL, LSR L-GL et LSR XL-GL
Ce sujet présente les paramètres de LSR S-GL, LSR L-GL et LSR XL-GL. En ajustant ces paramètres, la qualité des images 2D, des cartes de profondeur et des nuages de points peut être améliorée.
Aperçu
Les catégories de paramètres qui affectent la qualité de l’image 2D, de la carte de profondeur et du nuage de points sont les suivantes:
| Catégorie de paramètres | Image 2D | Carte de profondeur | Nuage de points |
|---|---|---|---|
|
|||
(1) |
|
|
|
|
|||
|
|
||
|
|
(1) Le paramètre Gain dans la catégorie paramètres 3D affecte la luminosité de l’image 2D (source de profondeur).
L’objectif de l’ajustement des paramètres est d’obtenir des images 2D, des cartes de profondeur et des nuages de points de haute qualité qui répondent aux critères suivants:
-
L’image 2D ne doit pas être trop claire ni trop sombre, et les caractéristiques de surface de l’objet cible doivent être clairement visibles dans l’image.
Si vous utilisez une caméra couleur et que la couleur de l’image diffère sensiblement de celle des objets, vous pouvez ajuster le paramètre balance des blancs. Pour des instructions détaillées, veuillez vous référer à Ajuster la balance des blancs. -
Dans la carte de profondeur et le nuage de points, les données requises doivent être complètes.
Déterminez quelle partie des données est nécessaire selon vos besoins réels. Par exemple, si vous devez saisir des bols métalliques avec l’ouverture vers le haut par le rebord, vous devez généralement seulement vous assurer que les données des rebords des bols sont complètes.
Ce modèle fournit deux types d’images 2D : image 2D (texture) et image 2D (source de profondeur). L’utilisation de chaque type est la suivante:
| Type | Scénario d’utilisation |
|---|---|
Image 2D (texture) |
Texturer le nuage de points |
Image 2D (source de profondeur) |
Vérifier les paramètres intrinsèques |
Définir la région d’intérêt (ROI) |
|
Effectuer la calibration main-œil |
1. Paramètres 2D
1.1. Image 2D (Texture)
Les paramètres de la sous-catégorie Image 2D(texture) influent sur la qualité de l’image 2D (texture).
1.1.1. Mode d’exposition
Description |
Définit le mode d’exposition pour la capture de l’image 2D (texture). |
|---|---|
Visibilité |
Débutant, Expert, Guru |
Valeurs |
|
Instruction |
Après avoir sélectionné différentes options, différents paramètres sont affichés dans la catégorie Paramètres 2D pour ajustement:
|
1.1.2. Chronométré: Temps d’exposition
Description |
Affecte la luminosité de l’image 2D (texture).
|
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
0.1 à 999 ms |
Instructions |
Ajustez ce paramètre en fonction de la qualité de l’image. L’image ne doit être ni trop lumineuse ni trop sombre, et les caractéristiques de surface de l’objet cible doivent être clairement visibles sur l’image.
|
Images obtenues avec différentes valeurs de Temps d’exposition (toutes les autres conditions identiques):
| 5 ms | 90 ms | 500 ms |
|---|---|---|
|
|
|

1.1.3. Auto: Valeur de gris
Description |
Affecte la luminosité de l’image 2D (texture). Augmentez la valeur si l’image est trop sombre et diminuez-la si elle est trop claire. |
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
0 à 255 |
Instruction |
N/A |
Images obtenues avec différentes valeurs de Valeur de gris (toutes les autres conditions identiques):
| 50 | 100 | 150 |
|---|---|---|
|
|
|



| La Valeur de gris d’une image monochrome est équivalente à la luminosité de l’image; la Valeur de gris d’une image couleur est équivalente à la luminosité de chaque canal de couleur. |
1.1.4. Auto: ROI d’exposition automatique
Description |
|
|---|---|
Visibilité |
Débutant, Expert, Guru |
Valeurs |
N/A |
Instruction |
Pour des instructions détaillées, consultez Définir la ROI d’exposition automatique ci-dessous. |
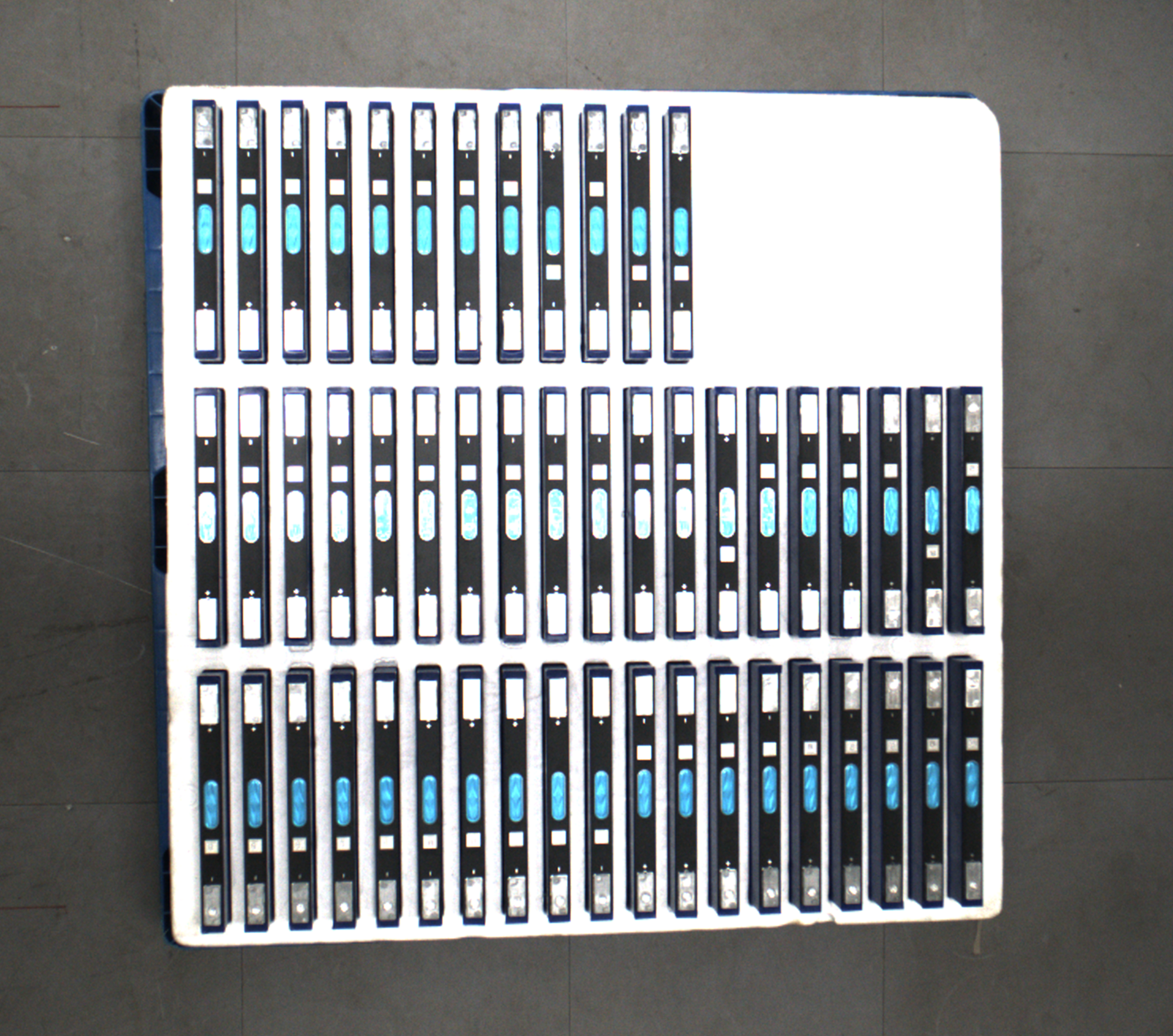
Images obtenues avec différentes valeurs de ROI d’exposition automatique (toutes les autres conditions identiques):
| ROI d’exposition automatique | Image 2D (texture) |
|---|---|
|
|
|
|
|
|





Définir la ROI d’exposition automatique
-
Cliquez sur Modifier à droite de ROI d’exposition automatique pour ouvrir la fenêtre Définir la ROI.
-
Sélectionnez et ajustez la ROI sur la gauche. Faites glisser la boîte de sélection pour la déplacer. Faites glisser les poignées sur la boîte pour ajuster la taille de la boîte.
-
Cliquez sur Appliquer pour appliquer la ROI d’exposition automatique définie.
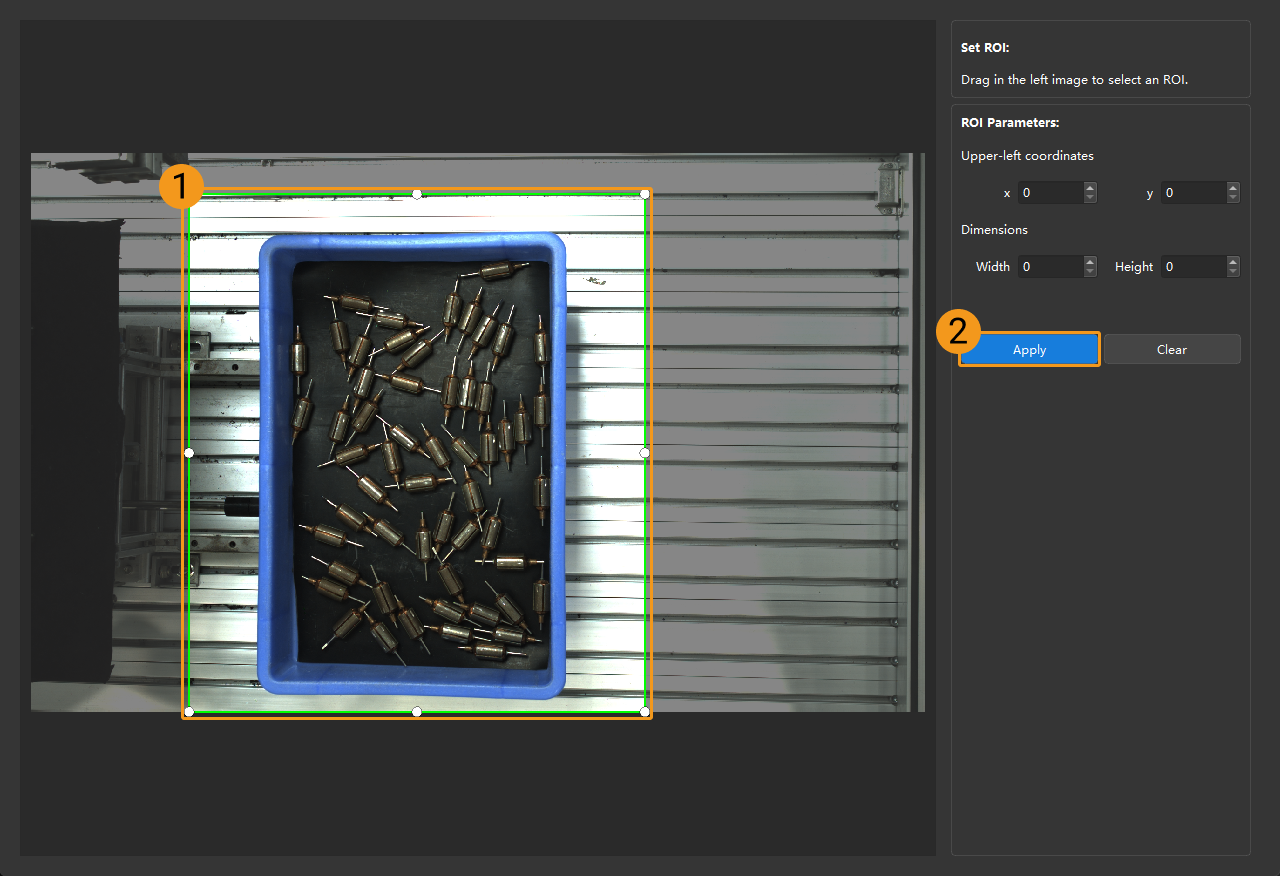
Cliquez sur Effacer pour supprimer la ROI d’exposition automatique actuelle. -
Acquérez à nouveau les données et affichez l’image pour vérifier le résultat de l’ajustement automatique de l’exposition.
1.1.5. HDR: Mappage de tonalité
Description |
Cette fonction peut rendre l’image plus naturelle. Activez cette fonction si l’image 2D (texture) semble très différente des objets réels. |
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
Mappage tonal interrupteur à bascule:
|
Images obtenues avec Mappage tonal désactivé ou activé (toutes les autres conditions identiques):
| Désactivé | Activé |
|---|---|
|
|


1.1.6. HDR: Séquence d’exposition
Description |
Définit plusieurs temps d’exposition, et les images capturées sont fusionnées pour générer une image 2D qui conserve davantage de détails dans les hautes lumières et les ombres. |
||
|---|---|---|---|
Visibilité |
Débutant, Expert, Gourou |
||
Valeurs |
N/A |
||
Instructions |
|
Images acquises avec des temps d’exposition uniques (toutes les autres conditions identiques):
| 500 ms | 700 ms | 900 ms |
|---|---|---|
|
|
|



Images acquises avec différentes séquences d’exposition constituées des temps d’exposition ci-dessus (toutes les autres conditions identiques):
| 500ms & 900ms | 500 ms & 700 ms & 900 ms |
|---|---|
|
|


1.1.7. Gain
Paramètres |
Ce paramètre augmente la luminosité de l’image 2D (texture), mais peut amplifier le bruit. |
|---|---|
Visibilité |
Expert, Gourou |
Valeurs |
0 à 16 dB |
Instruction |
Lorsque la luminosité attendue ne peut pas être atteinte en ajustant Temps d’exposition, réglez ce paramètre. |
Images 2D (texture) obtenues avec différentes valeurs de Gain (toutes les autres conditions identiques) :
| 0 | 5 | 10 |
|---|---|---|
|
|
|


1.2. Image 2D (source de profondeur)
Les paramètres de la sous-catégorie Image 2D(source de profondeur) influent sur la qualité de l’image 2D (source de profondeur).
| La luminosité de l’image 2D (source de profondeur) est influencée par le paramètre Gain dans la catégorie Paramètres 3D. |
1.2.1. Mode d’exposition
Description |
Définit le mode d’exposition pour la capture des images 2D (source de profondeur). |
|---|---|
Visibilité |
Débutant, Expert, Guru |
Valeurs |
|
Instruction |
Après avoir sélectionné différentes options, différents paramètres sont affichés dans la catégorie Paramètres 2D pour ajustement:
|
| Lors de l’utilisation d’une caméra LSR S-GL, LSR L-GL ou LSR XL-GL avec Mech-Vision, le port « Image couleur » dans Mech-Vision délivre l’image 2D (source de profondeur). Si vous devez ajuster « Image couleur » dans Mech-Vision, veuillez ajuster Mode d’exposition de l’image 2D (source de profondeur). |
1.2.2. Chronométré: Temps d’exposition de l’image 2D (source de profondeur)
Description |
Affecte la luminosité de l’image 2D (source de profondeur)).
|
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
0.1 à 999 ms |
Instructions |
Ajustez ce paramètre en fonction de la qualité de l’image. L’image ne doit être ni trop lumineuse ni trop sombre, et les caractéristiques de surface de l’objet cible doivent être clairement visibles sur l’image.
|
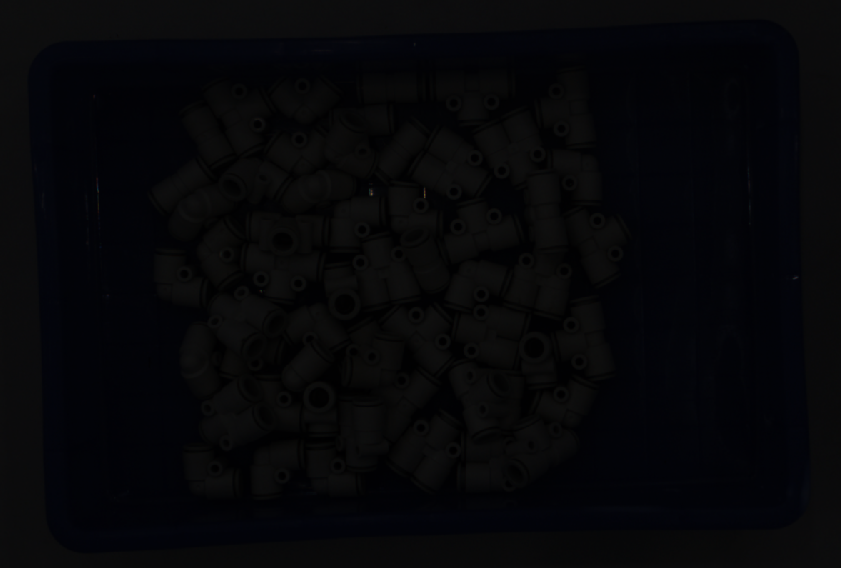
Images 2D obtenues avec différentes valeurs de Temps d’exposition de l’image 2D (source de profondeur) (toutes les autres conditions identiques):
| 10 ms | 40 ms | 80 ms |
|---|---|---|
|
|
|

1.2.3. Flash: Mode d’acquisition du flash
Description |
Sélectionne le mode d’acquisition d’images 2D (source de profondeur) lors de l’ajout d’un éclairage d’appoint avec le projecteur. Pour des descriptions détaillées, voir Mode d’exposition Flash 2D. |
|---|---|
Visibility |
Débutant, Expert, Gourou |
Values |
|
Instruction |
Ajustez ce paramètre en fonction des besoins réels en vitesse d’acquisition des données et du taux de rafraîchissement de l’image lors d’une acquisition continue. Lorsque Réactif est sélectionné, Temps d’exposition du flash sera affiché pour réglage. |
|
1.2.4. Flash: Temps d’exposition du flash
Description |
Définit la durée d’exposition pour la capture d’images 2D (source de profondeur) lorsque la valeur de Mode d’acquisition du flash est réglée sur Réactif. |
||
|---|---|---|---|
Visibilité |
Débutant, Expert, Gourou |
||
Valeurs |
0.1–99ms |
||
Instruction |
Une durée d’exposition longue est généralement utilisée dans des environnements sombres, et une durée d’exposition courte est généralement utilisée dans des environnements lumineux.
|
2. Paramètres 3D
Les paramètres de cette catégorie affectent les images utilisées pour le calcul des données de profondeur, affectant ainsi la qualité de la carte de profondeur et du nuage de points.
L’utilisation de Assistant d’exposition permet d’obtenir les valeurs recommandées des paramètres d’exposition. Cliquez sur Réglage automatique à droite de Paramètres 3D pour ouvrir Assistant d’exposition.
2.1. Multiplicateur d’exposition
Description |
Définissez le nombre de Temps d’exposition. |
||
|---|---|---|---|
Visibilité |
Débutant, Expert, Gourou |
||
Valeurs |
1 à 3 |
||
Instructions |
|
|
Multiplicateur d’exposition n’est pas disponible lorsque Mode de codage à franges dans la catégorie Paramètres 3D est réglé sur Réfléchissant. |
2.2. Temps d’exposition
Description |
Définit le temps d’exposition pour l’acquisition des informations de profondeur. Le nombre de valeurs de Temps d’exposition à définir dépend de la valeur du Multiplicateur d’exposition. |
||
|---|---|---|---|
Visibility |
Débutant, Expert, Gourou |
||
Values |
8–96 ms |
||
Instructions |
|
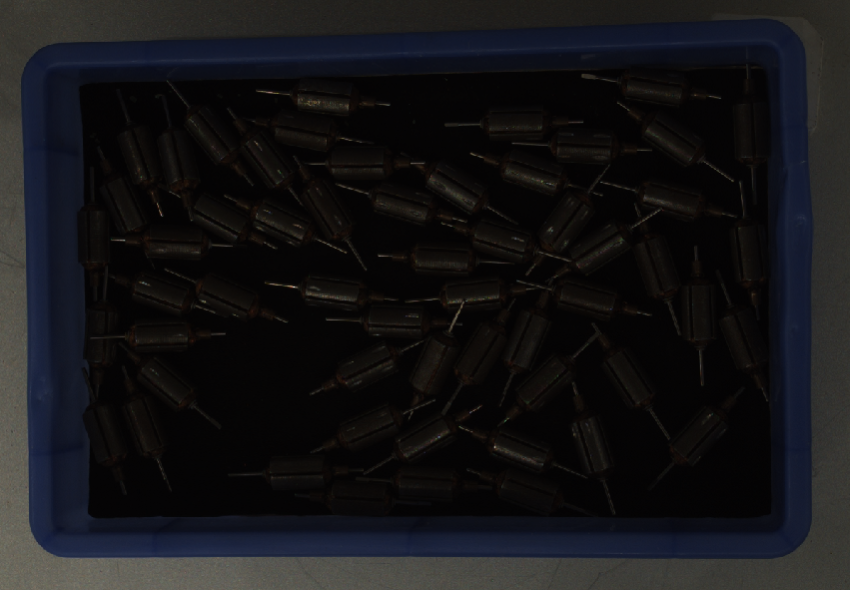
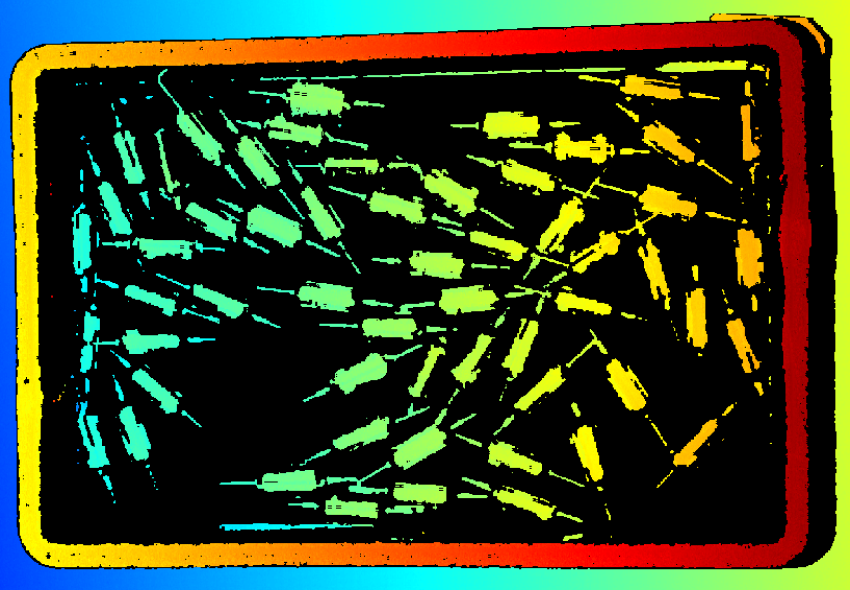
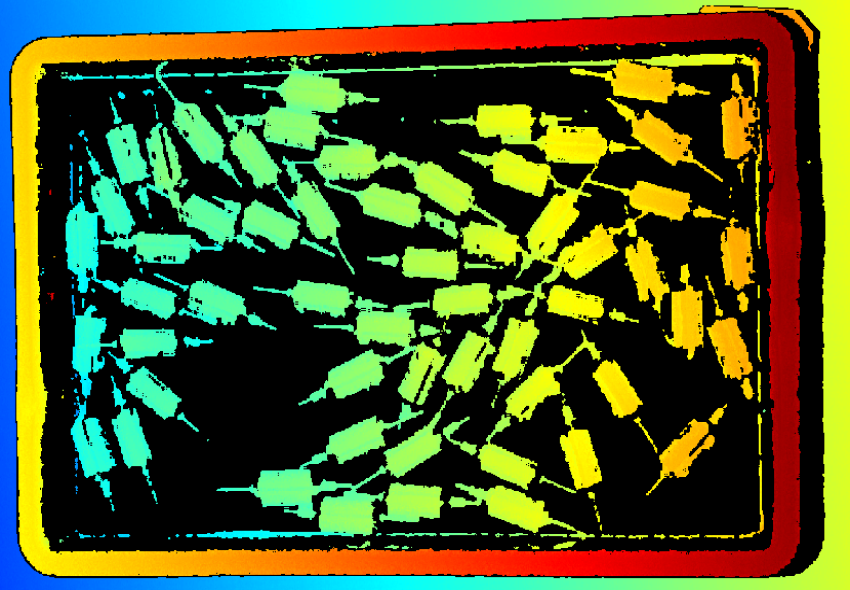
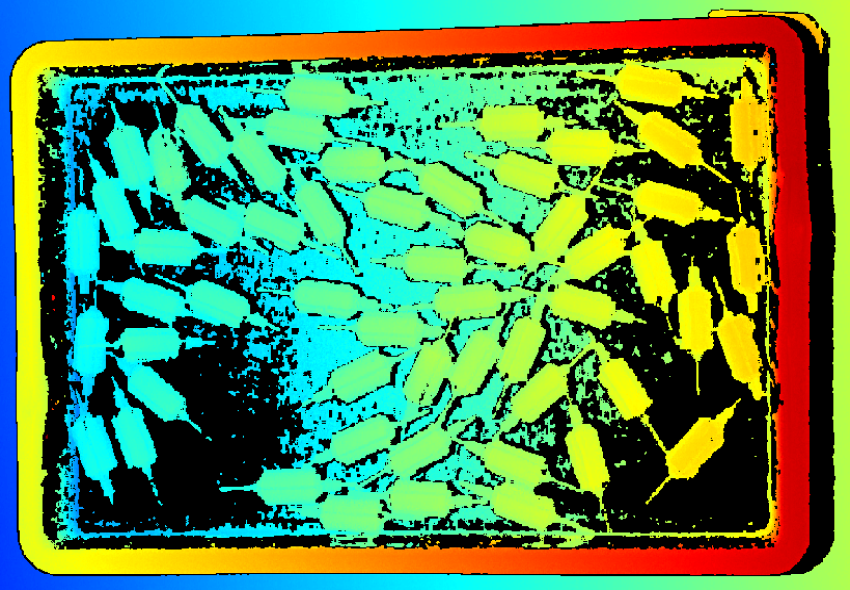
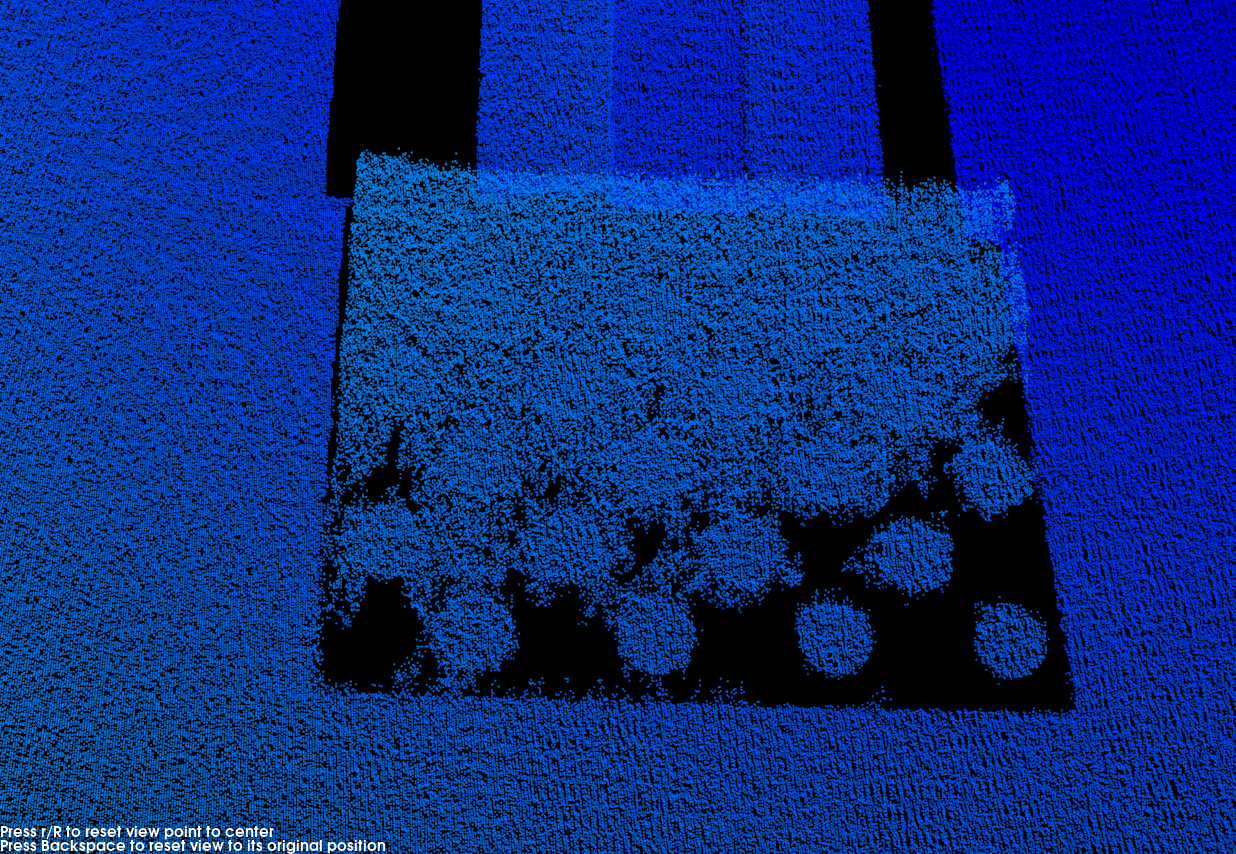
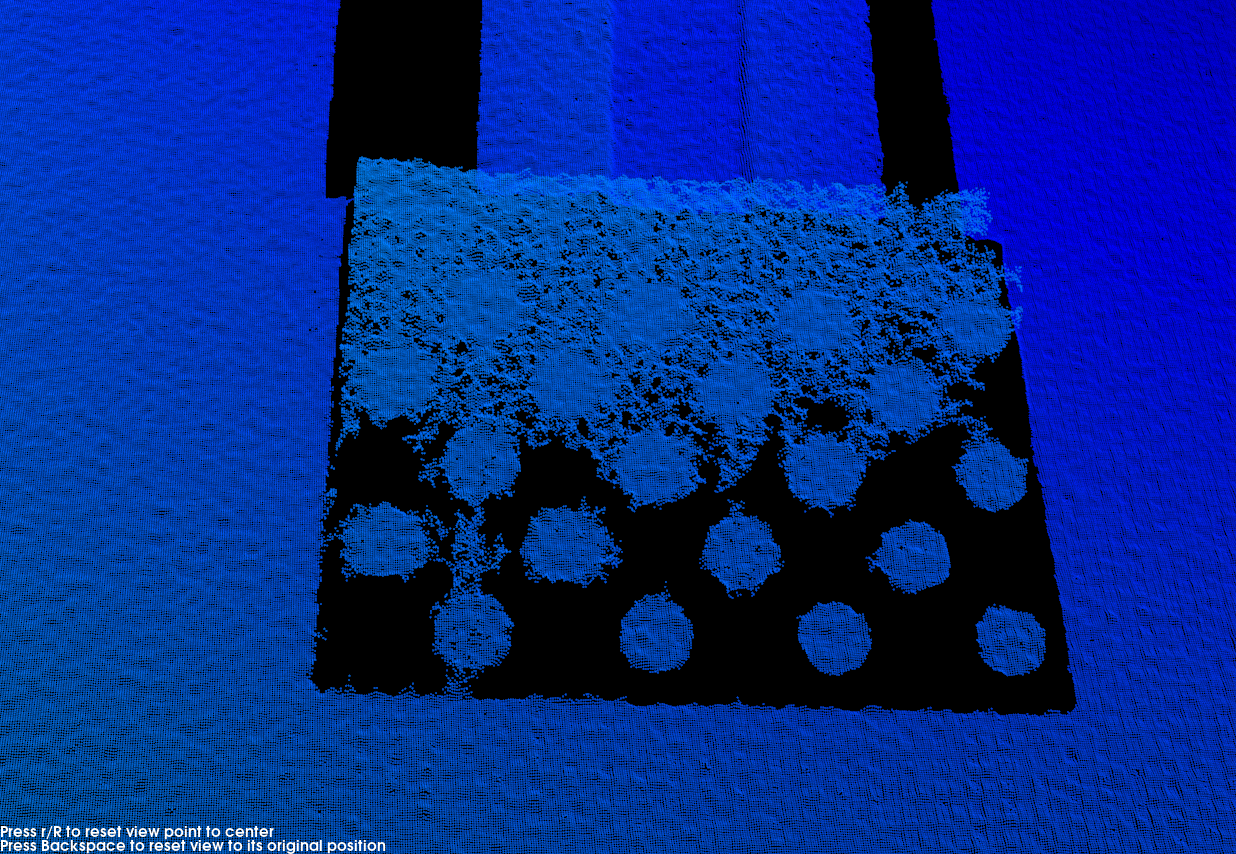
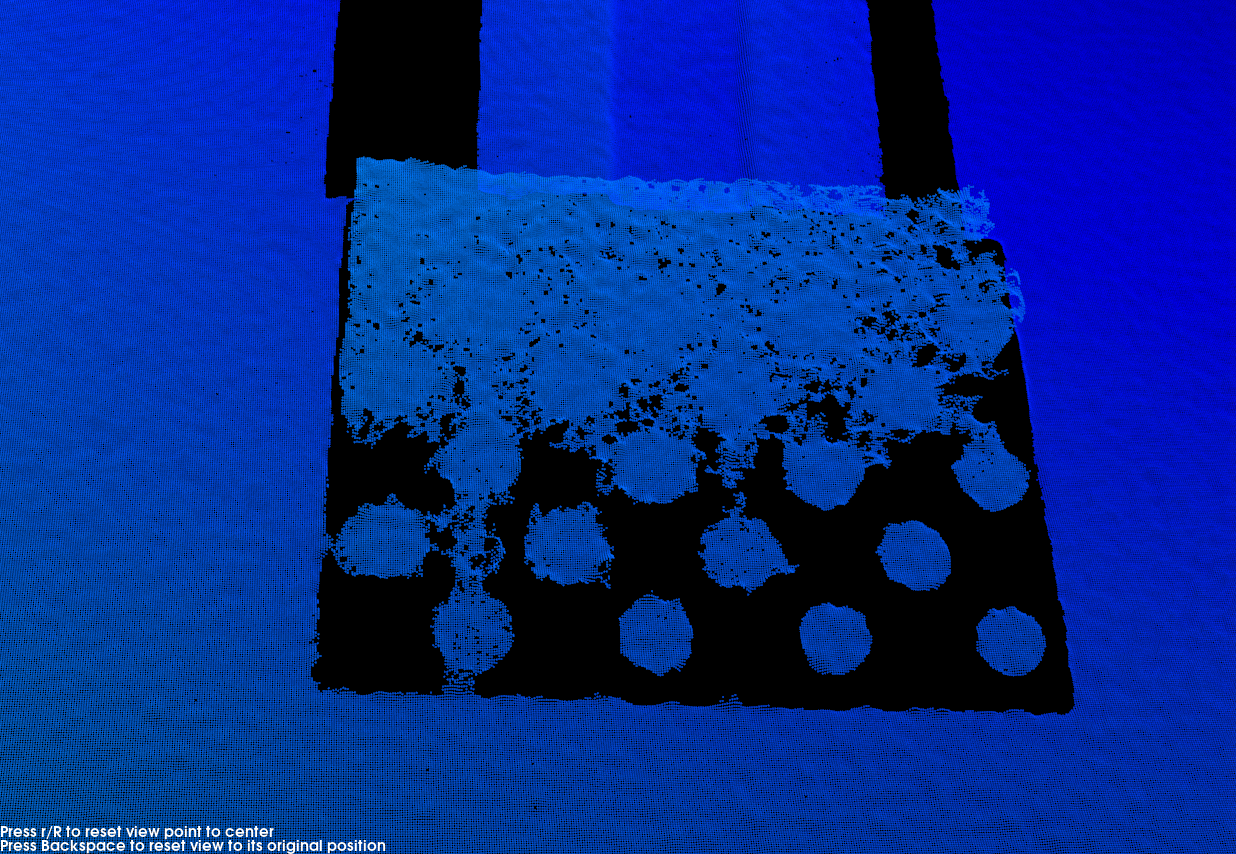
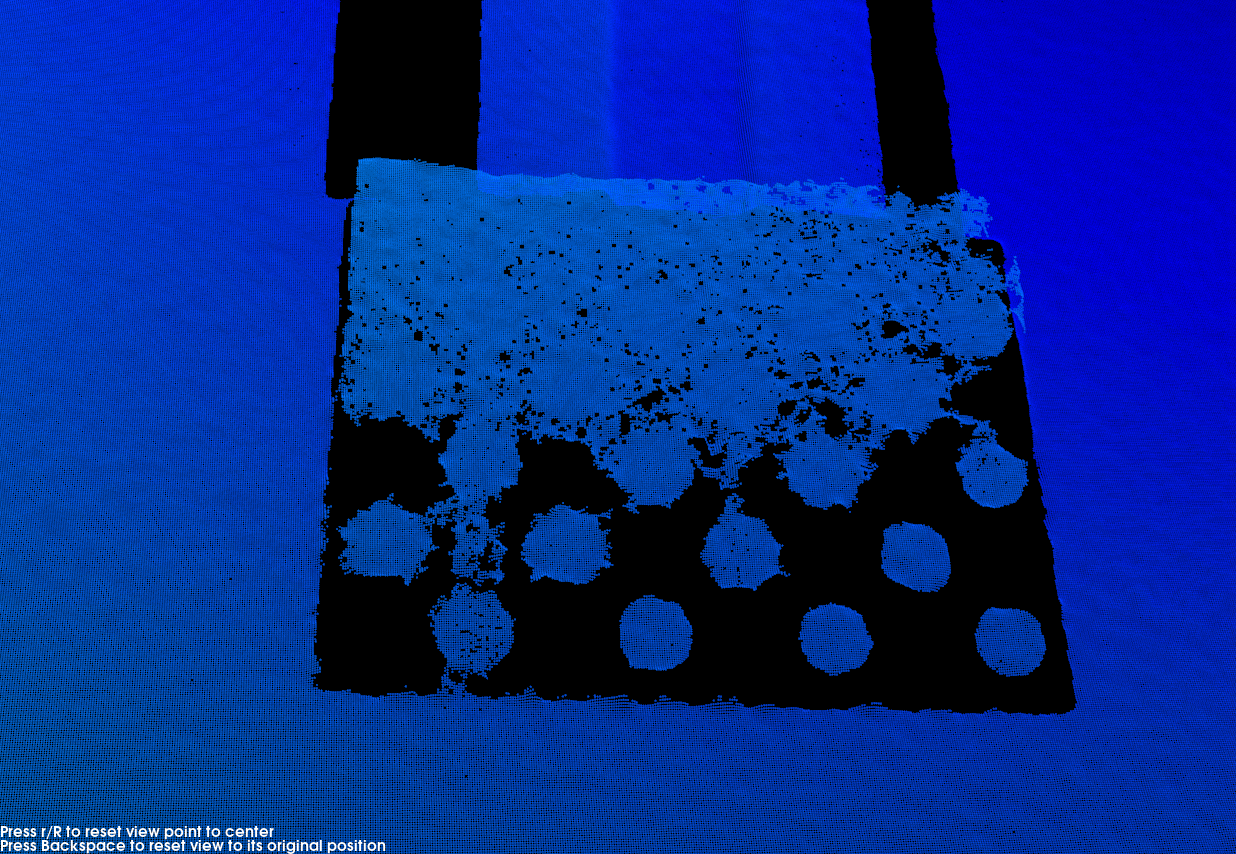
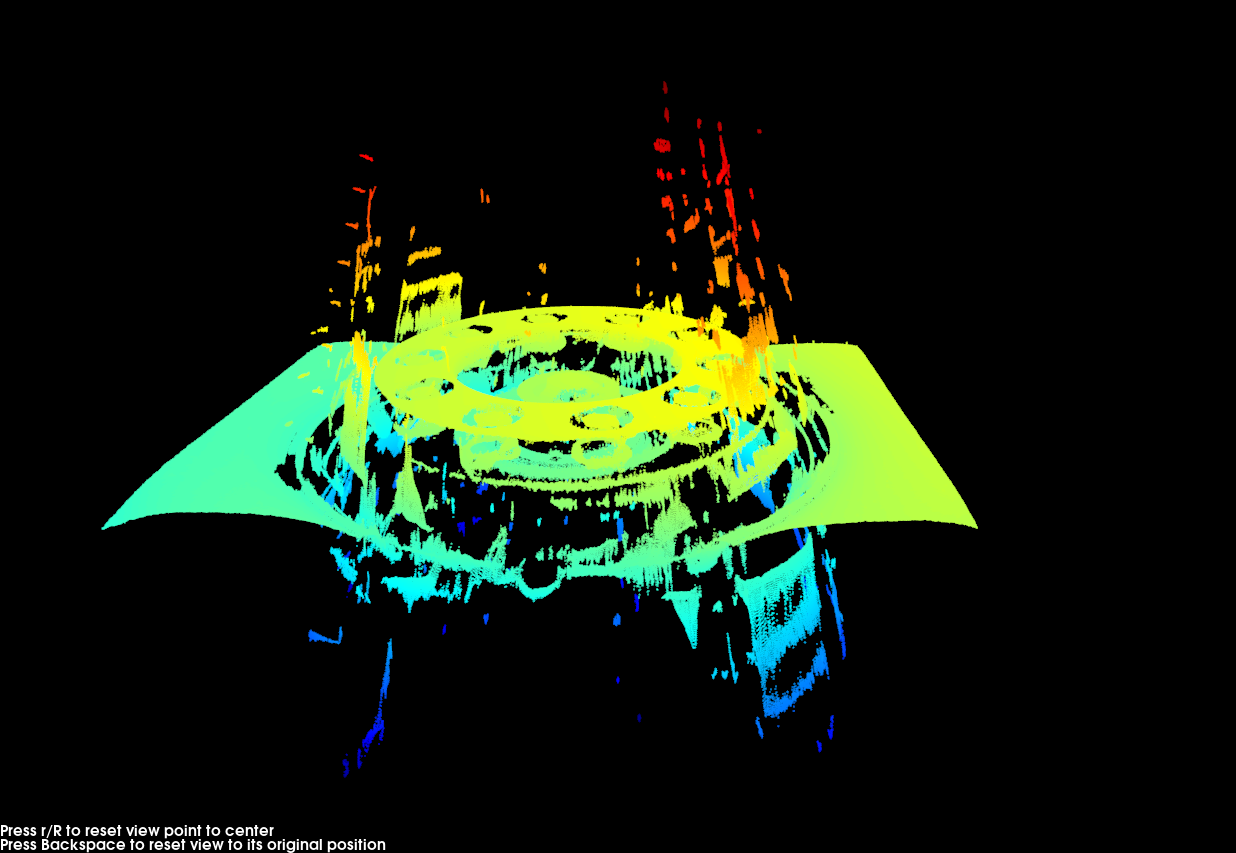
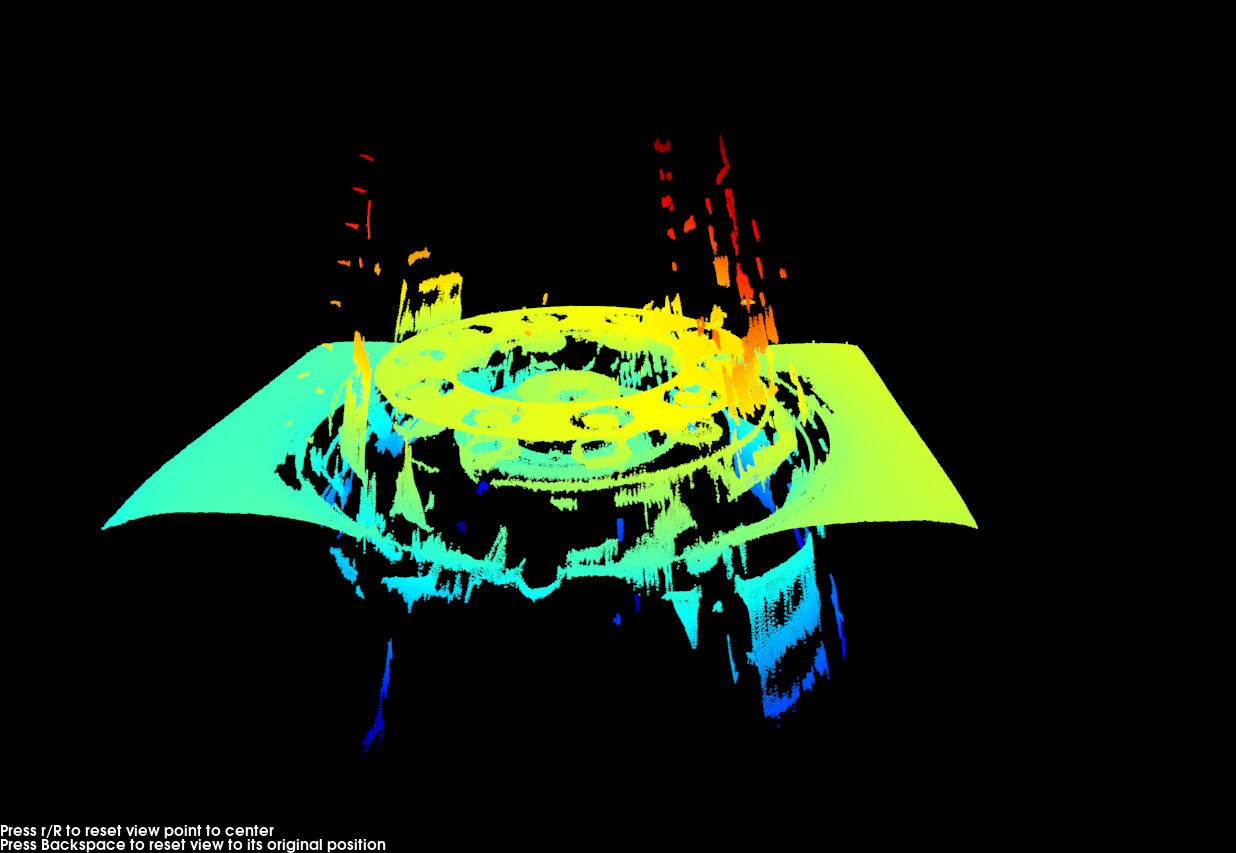
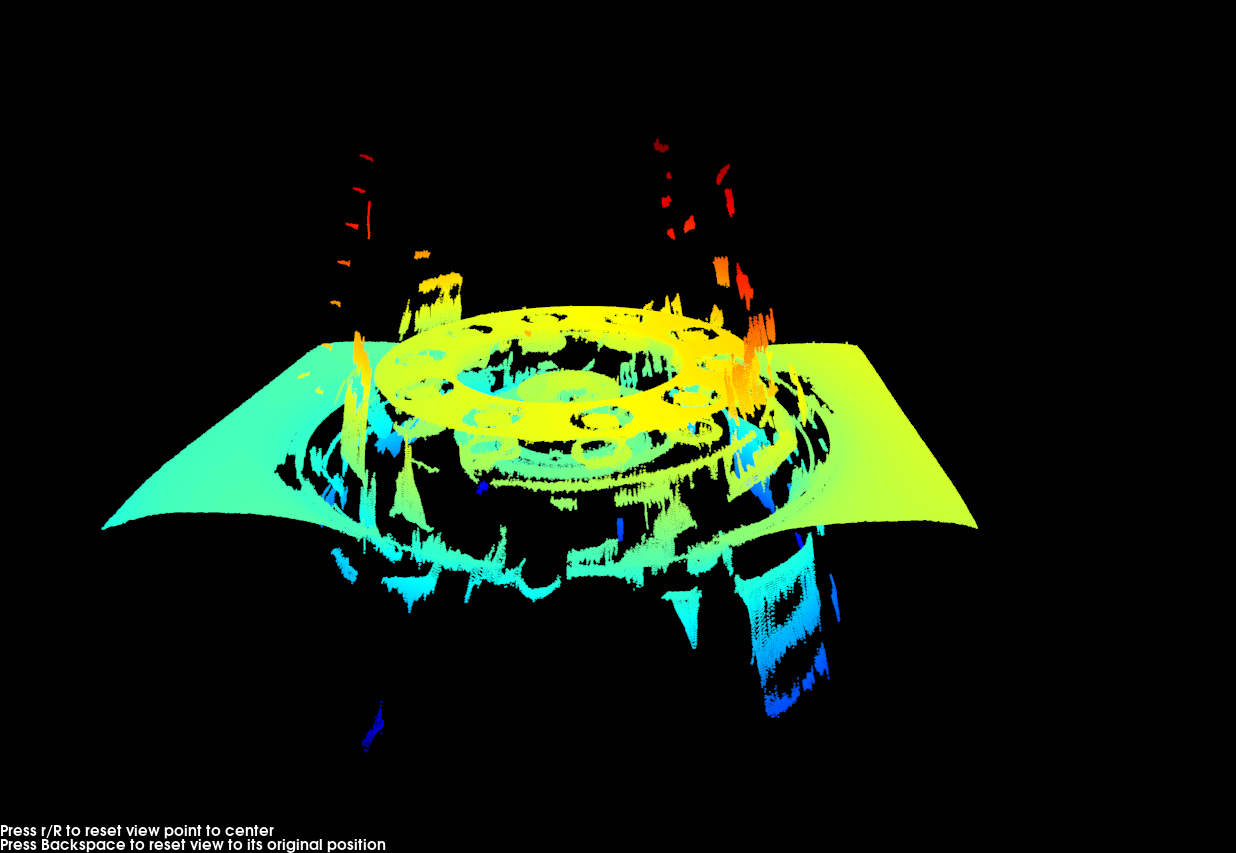
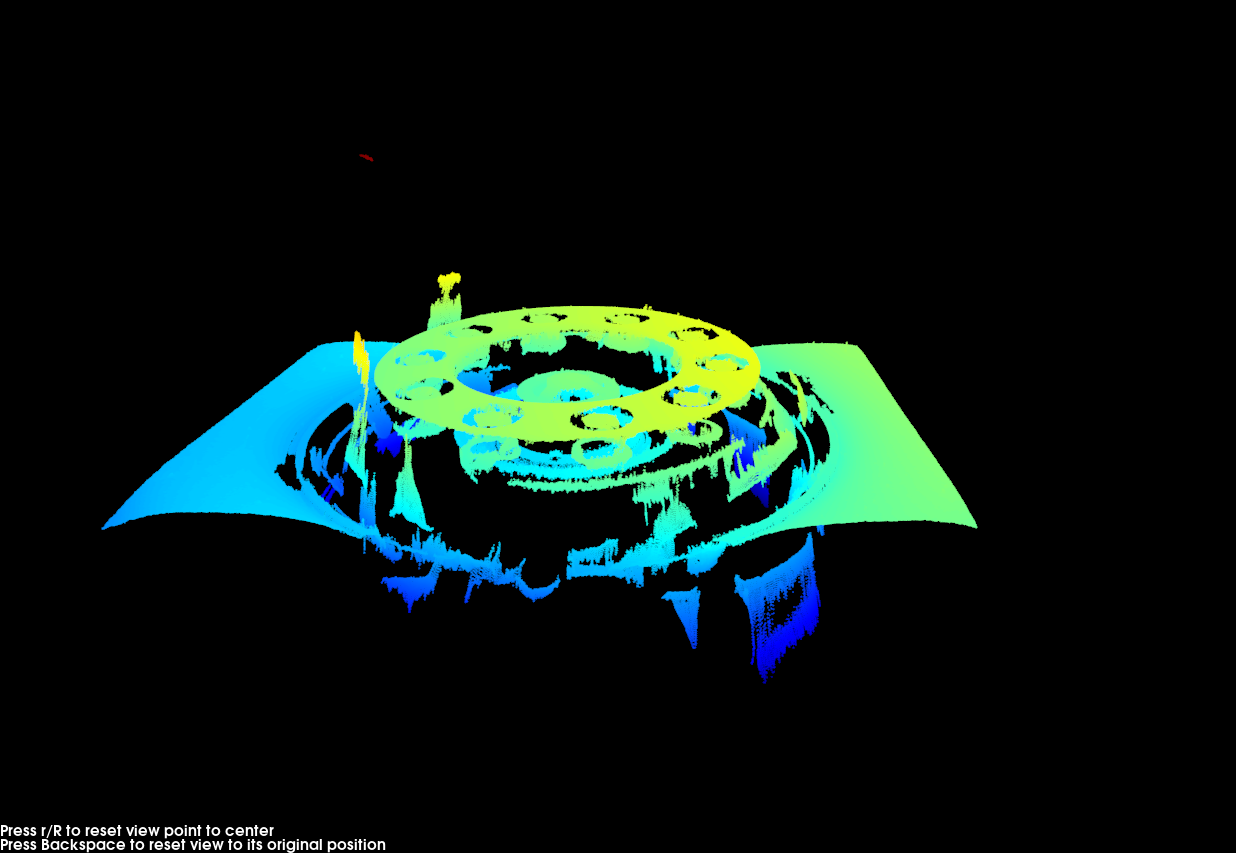
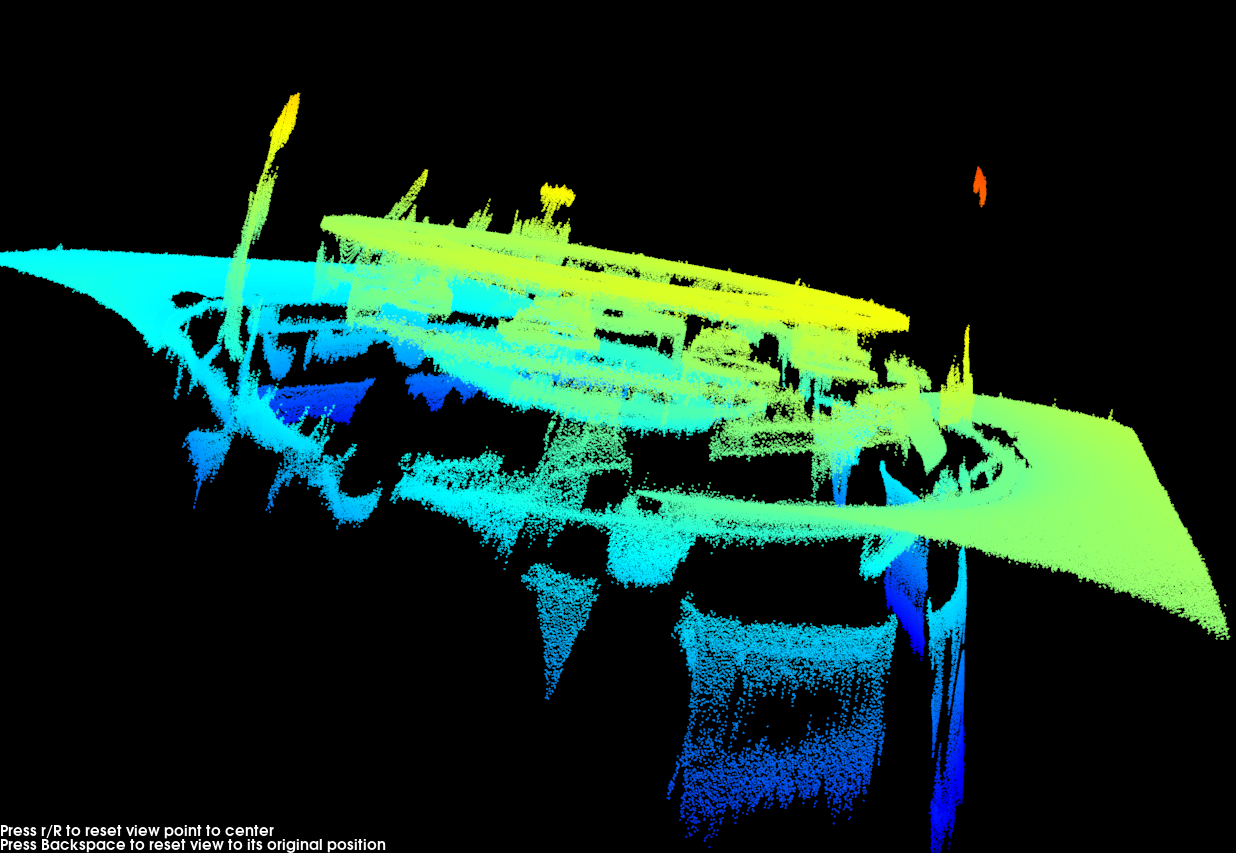
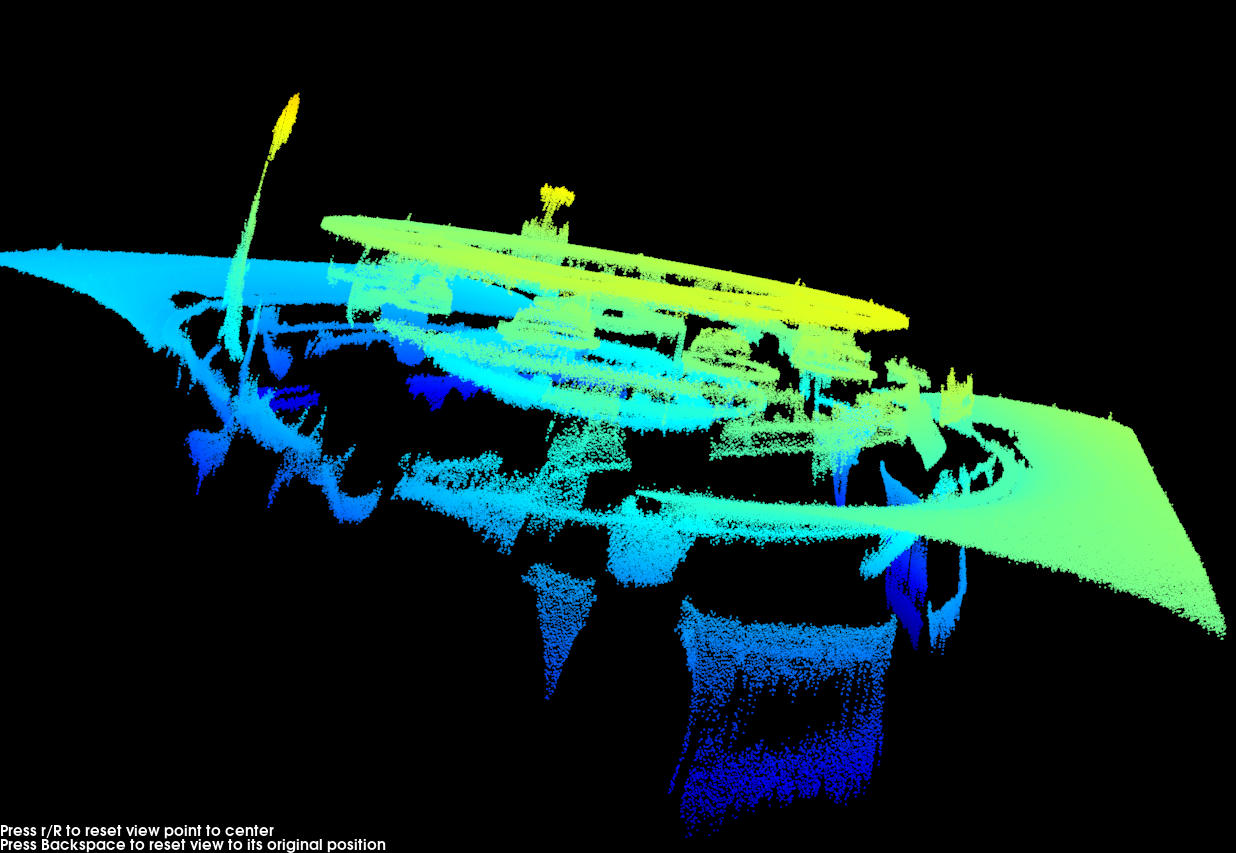
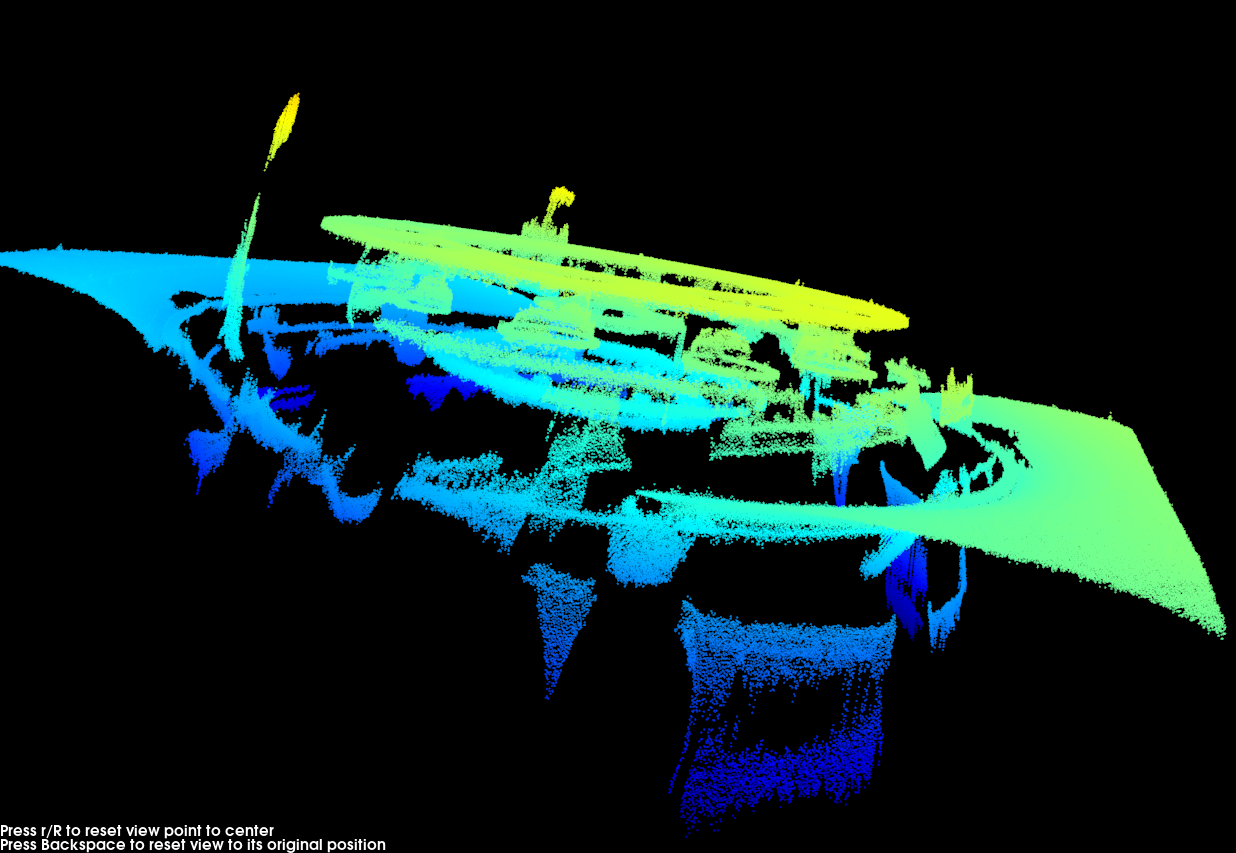
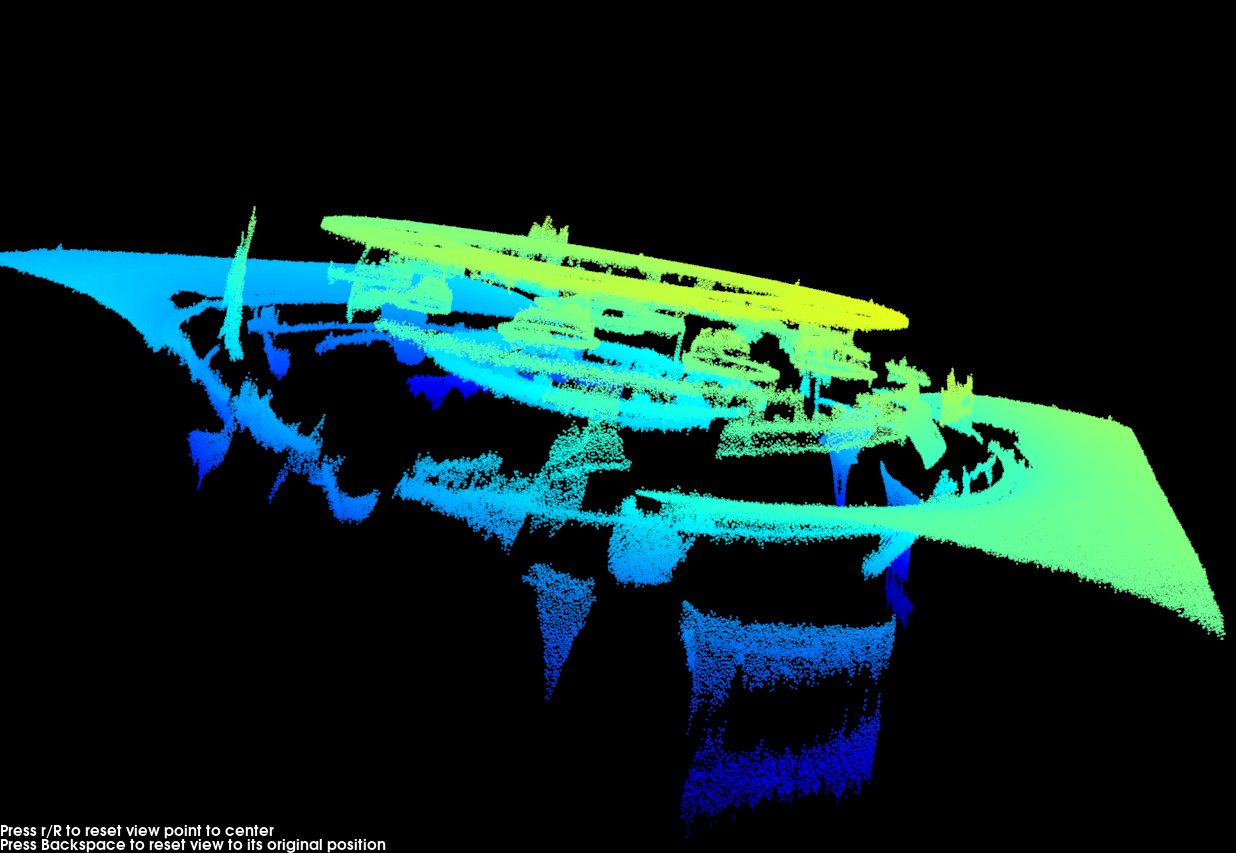
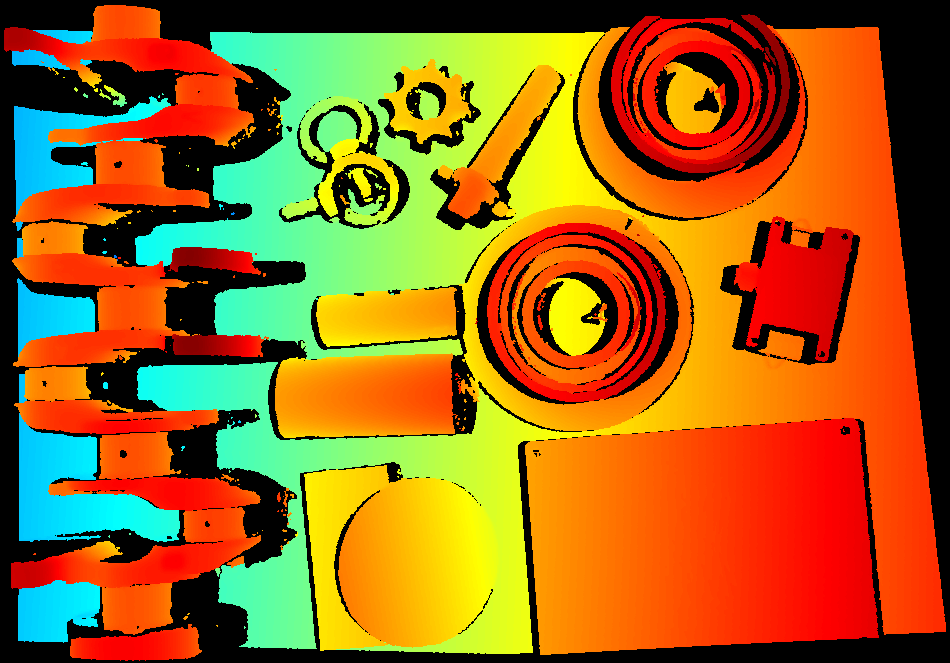
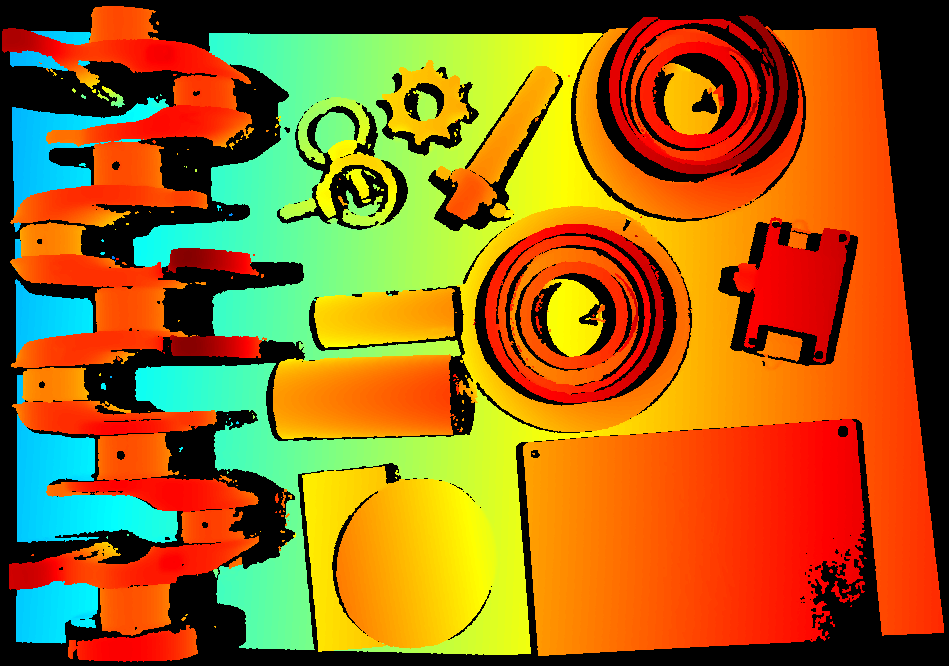
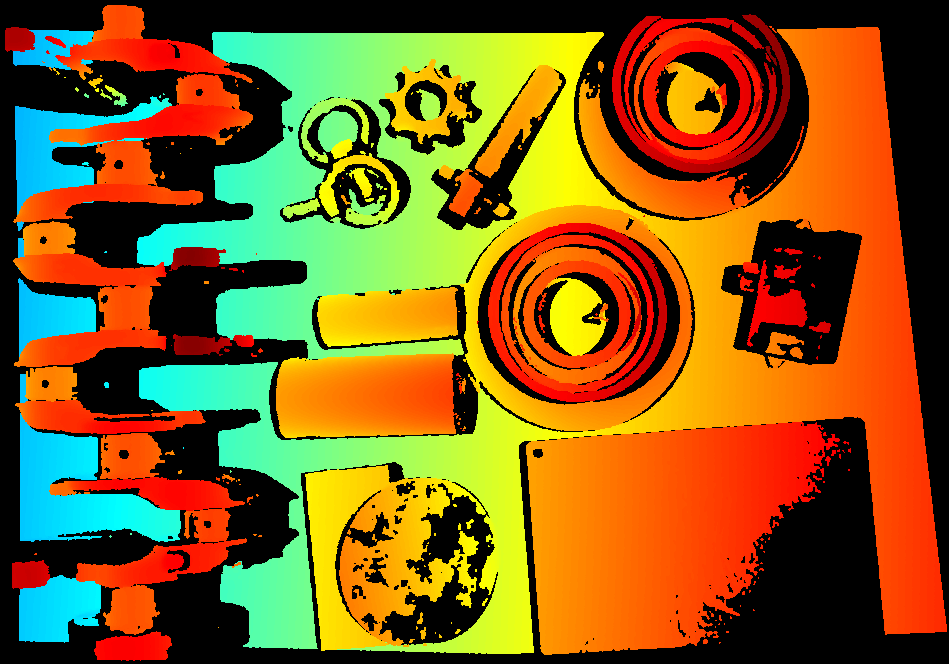
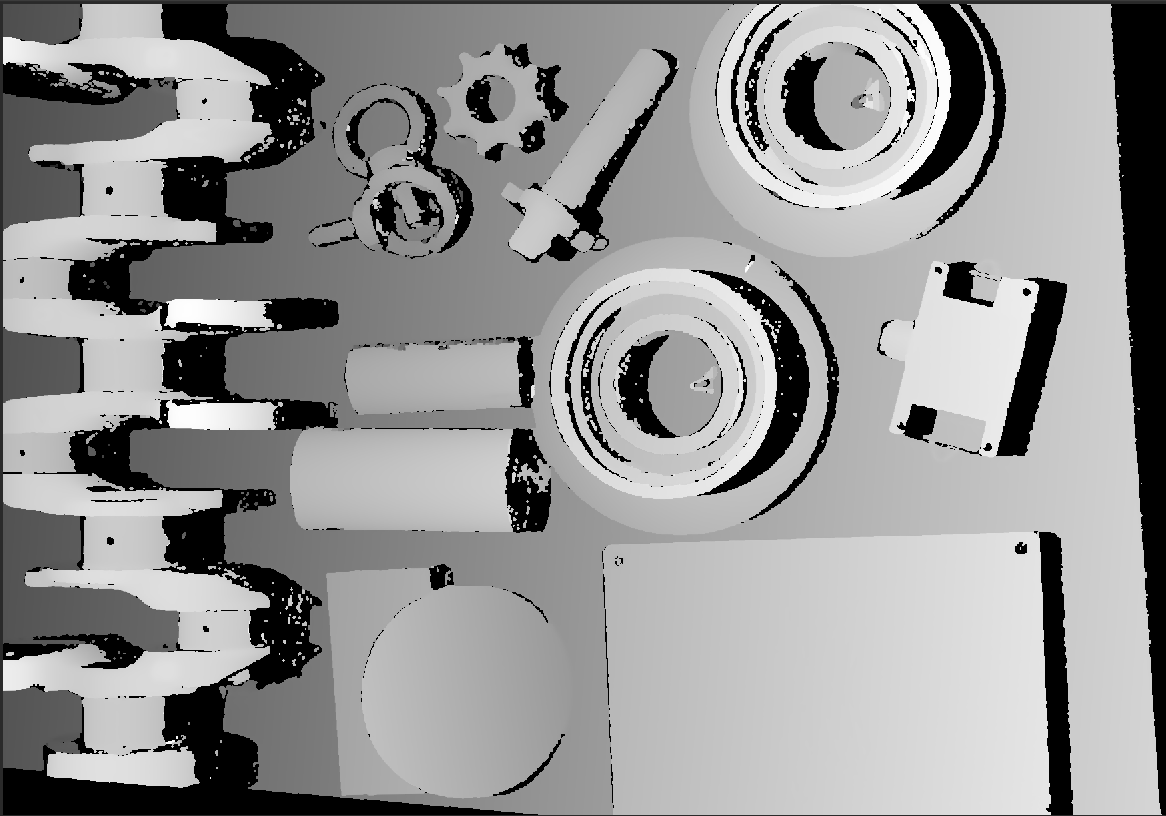
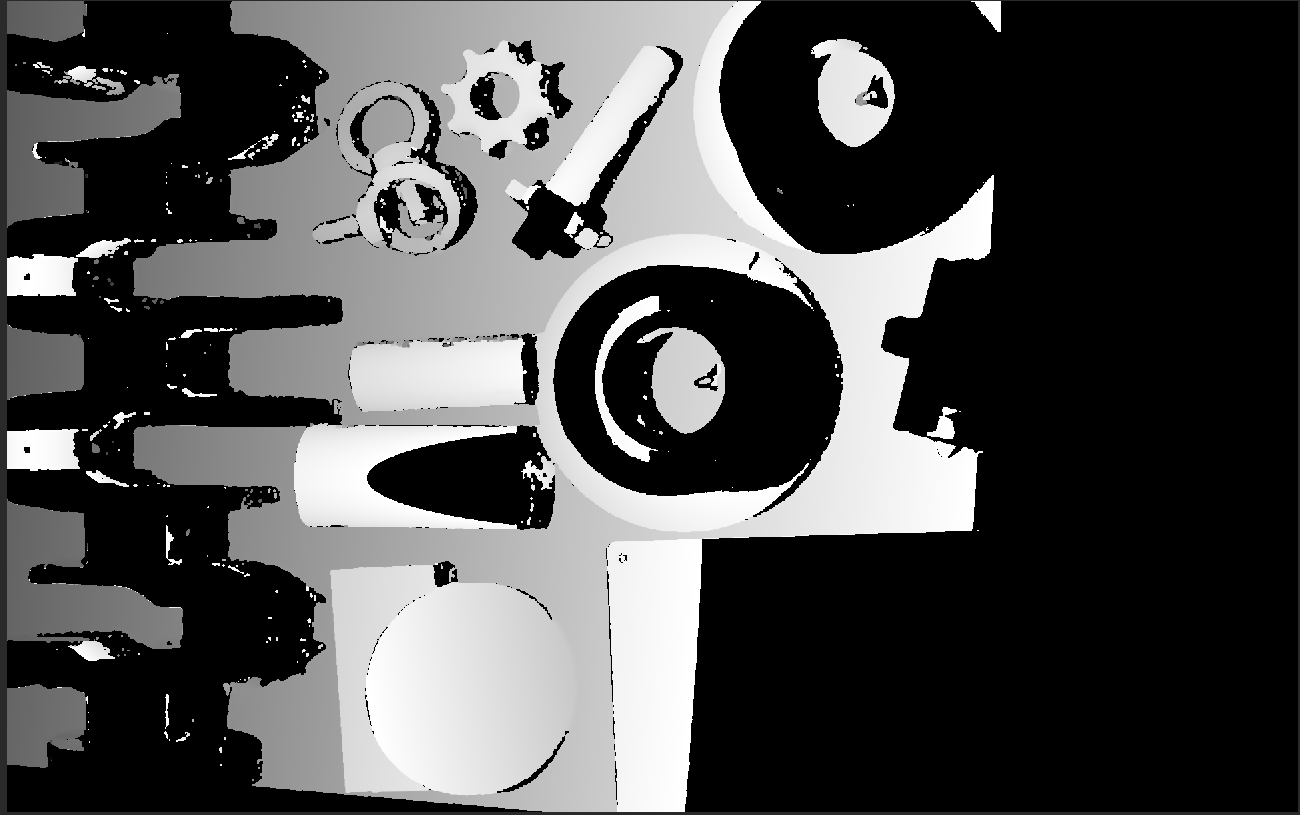
Nuages de points obtenus avec différentes valeurs de Temps d’exposition (toutes les autres conditions identiques):
| Temps d’exposition 1 ms | Temps d’exposition 4 ms | Temps d’exposition 10 ms | Temps d’exposition 50 ms |
|---|---|---|---|
|
|
|
|
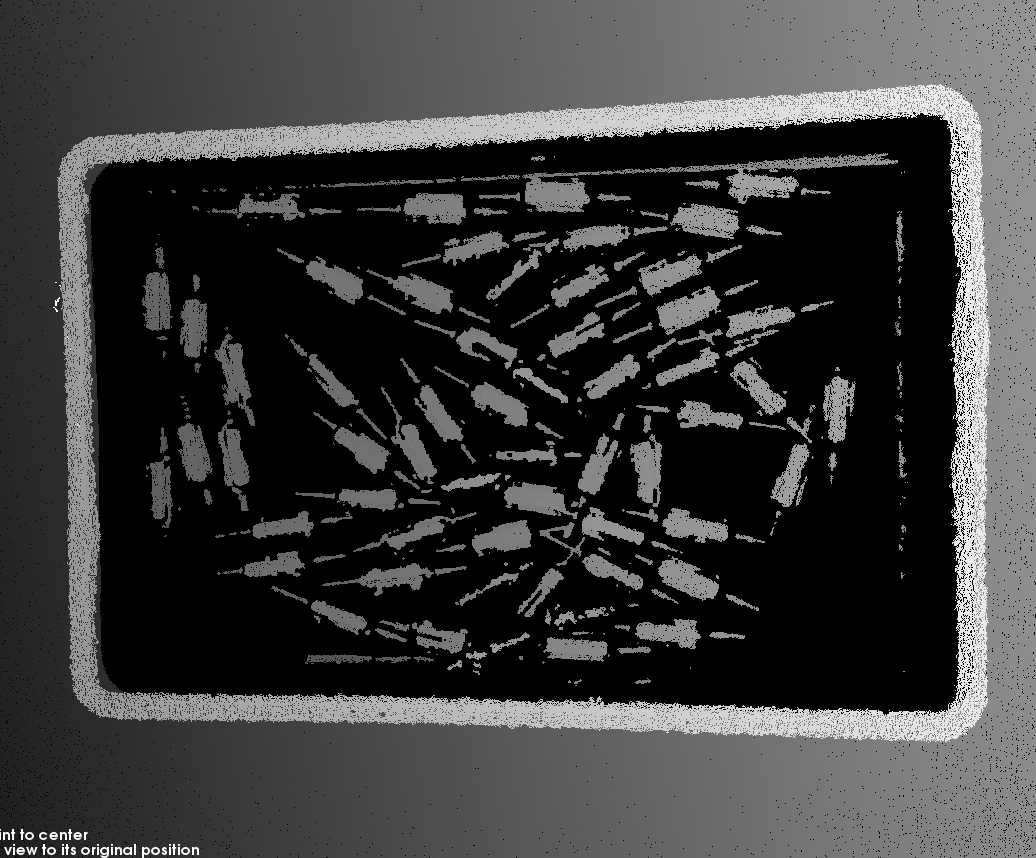
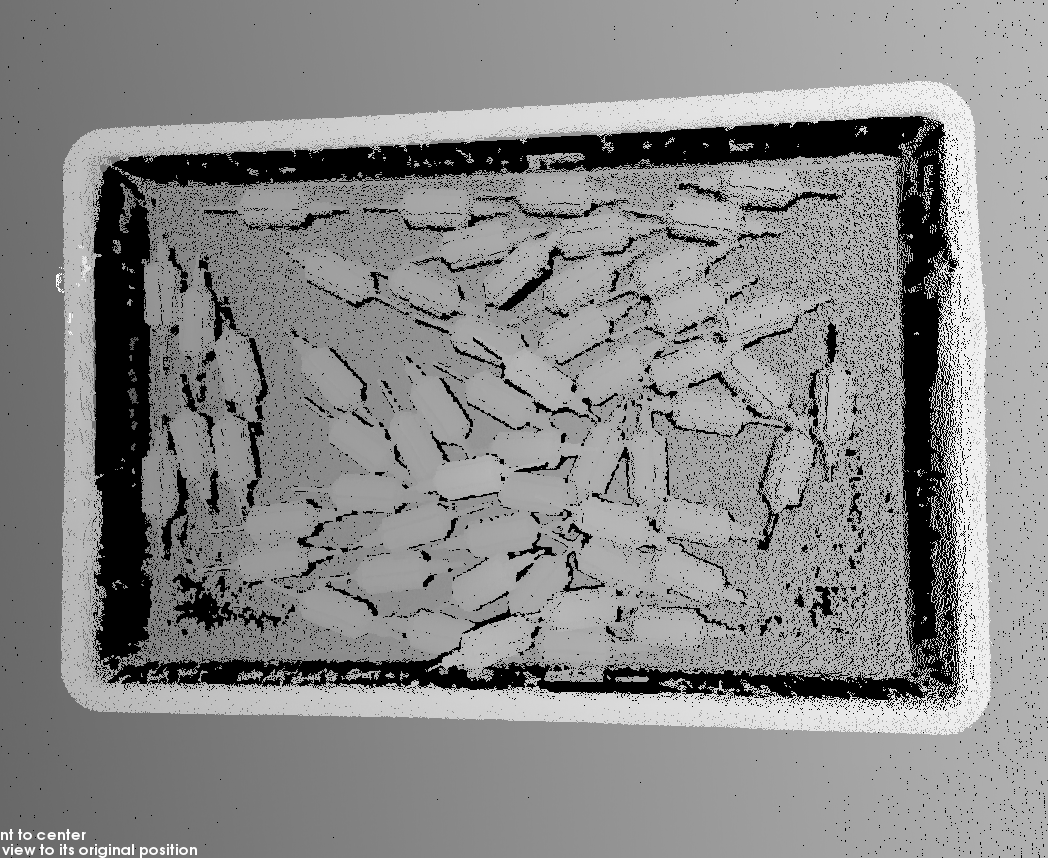
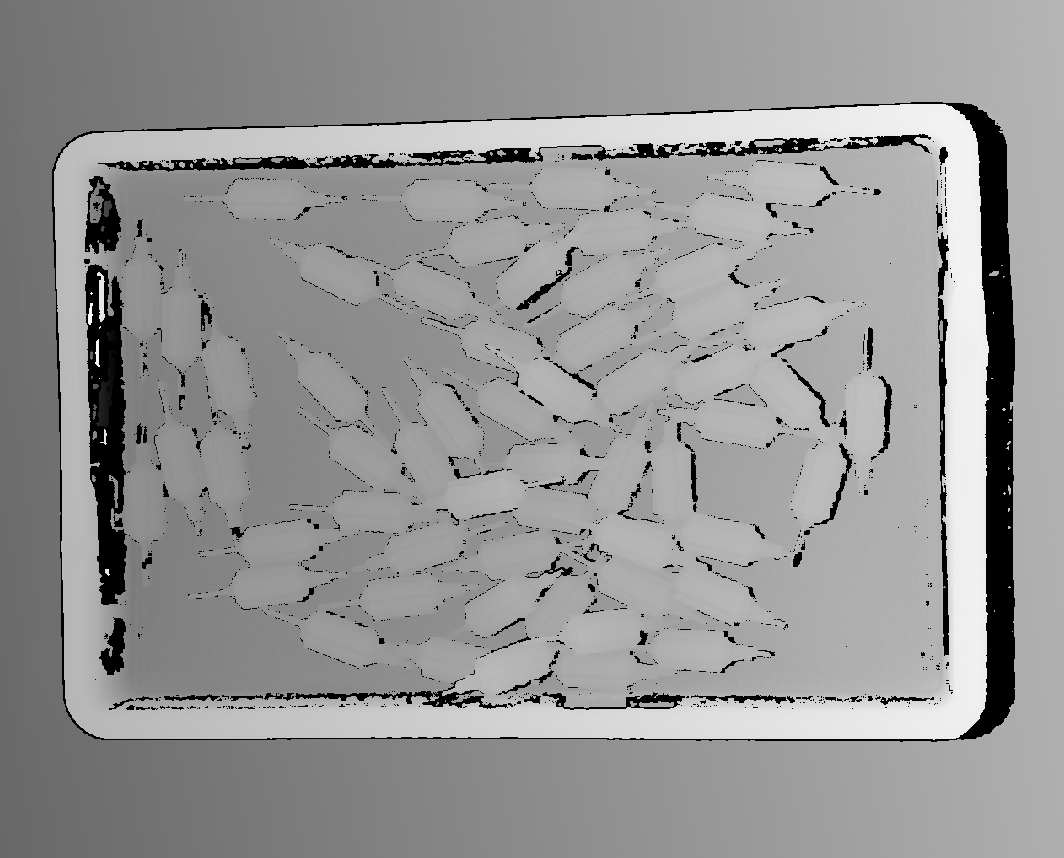
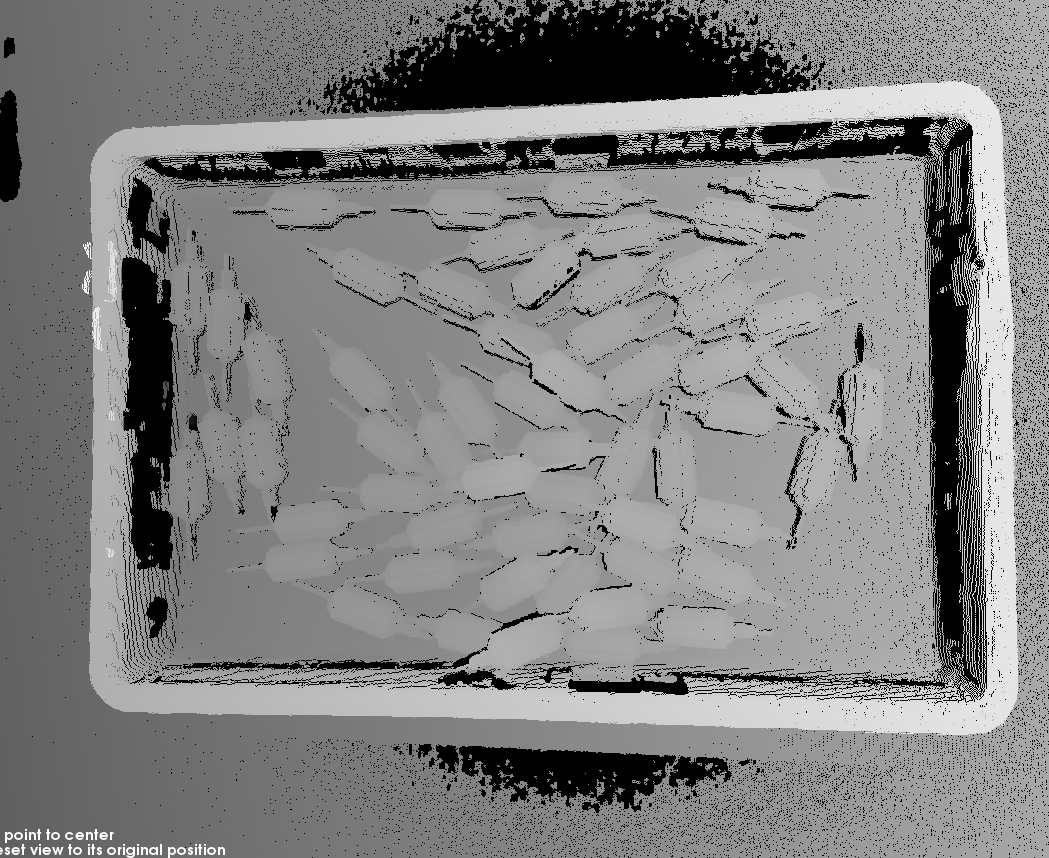
| Les zones noires manquent d’informations de profondeur pour générer le nuage de points correspondant. |
2.3. Gain
Description |
Ce paramètre augmente la luminosité de la carte de profondeur, mais peut amplifier le bruit.
|
||
|---|---|---|---|
Visibilité |
Expert, Gourou |
||
Valeurs |
0 à 16 dB |
||
Instructions |
Lorsque la luminosité attendue ne peut pas être atteinte en ajustant Temps d’exposition, ajustez ce paramètre.
|
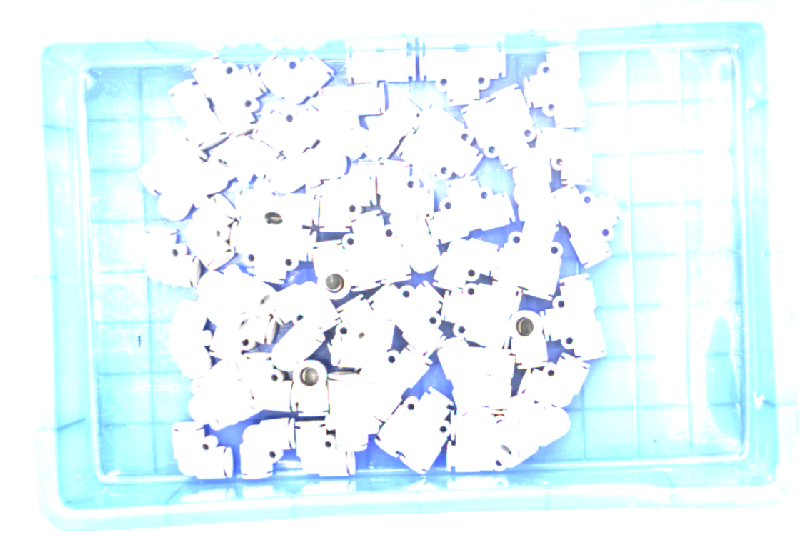
Images 2D (source de profondeur) et cartes de profondeur obtenues avec différentes valeurs de Gain (toutes les autres conditions identiques) :
| 0 | 5 | 10 | |
|---|---|---|---|
Image 2D (source de profondeur) |
|
|
|
Carte de profondeur |
|
|
|


2.4. Laser
2.4.1. Mode de codage des franges
Description |
Sélectionnez le motif de la lumière structurée à projeter. |
|---|---|
Visibilité |
Expert, Guru |
Valeurs |
|
Instructions |
Ajustez ce paramètre en fonction du type d’objets cibles et de vos besoins réels en matière de qualité des données et de vitesse d’acquisition des données. Lorsque Reflective est sélectionné, le paramètre Mode de traitement est affiché. |
|
-
Lorsque l’objet cible n’est pas réfléchissant, les nuages de points obtenus avec Mode d’encodage à franges réglé sur Précis et Rapide sont les suivants (toutes les autres conditions identiques) :
Précis Rapide 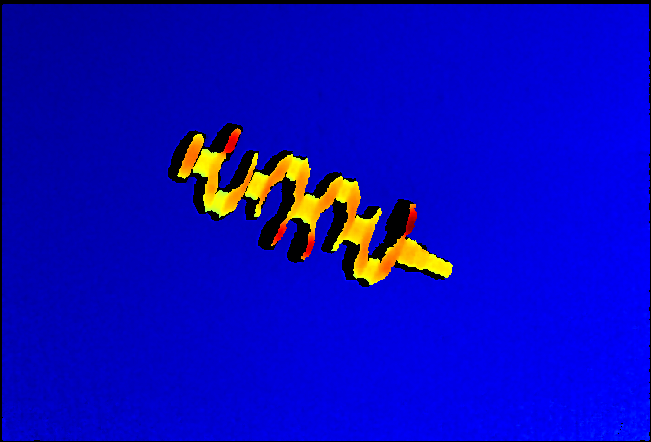
-
Lorsque l’objet cible est réfléchissant, les nuages de points obtenus avec Mode d’encodage à franges réglé sur Précis et Réfléchissant sont les suivants (toutes les autres conditions identiques) :
Précis Réfléchissant 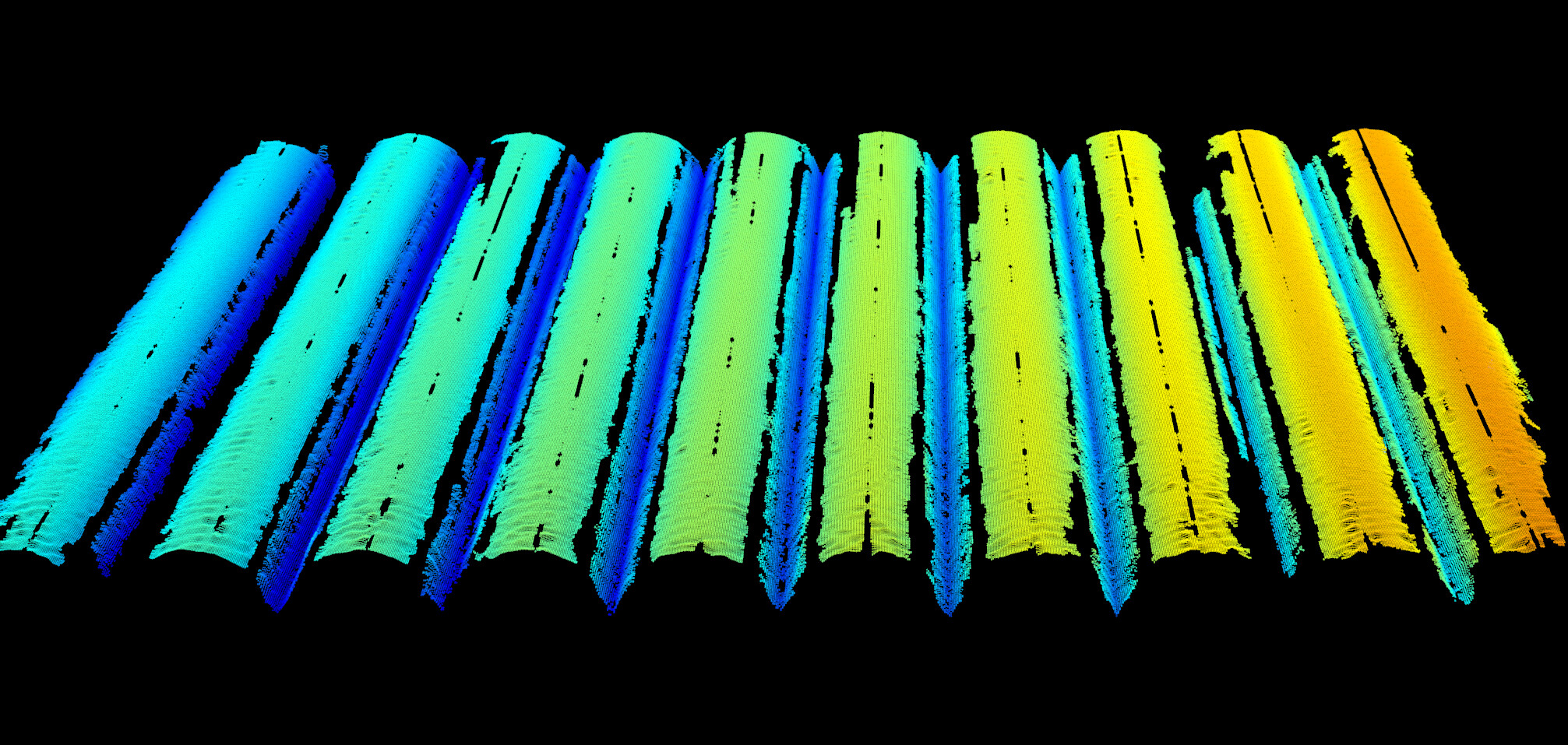
2.4.2. Réfléchissant: Mode de traitement
Description |
Sélectionnez le mode de traitement des données pour le mode de codage à franges Réfléchissant. |
|---|---|
Visibility |
Expert, Guru |
Values |
|
Instruction |
Ajustez ce paramètre en fonction de vos besoins réels en matière de qualité des données et de vitesse d’acquisition. |
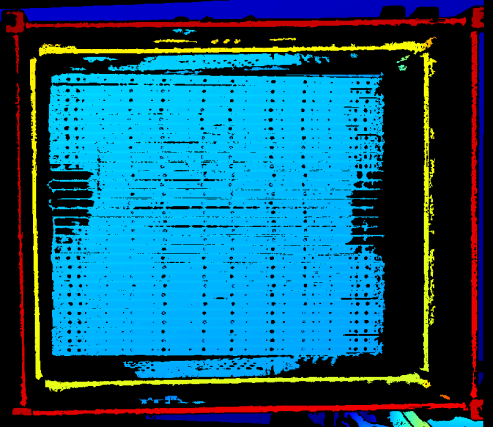
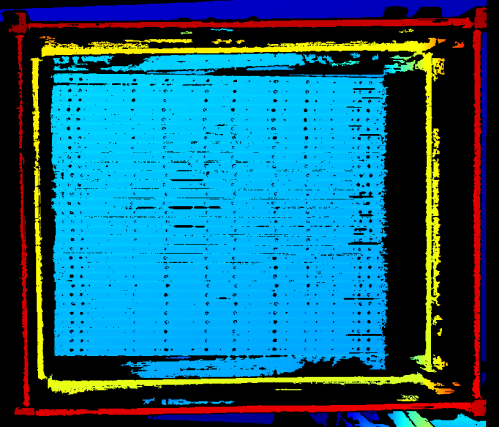
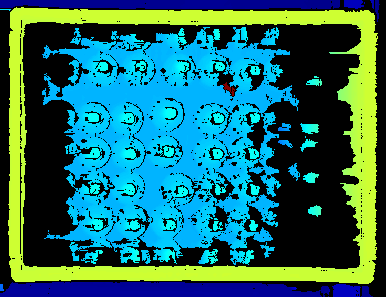
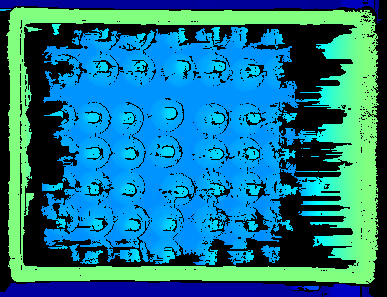
Nuages de points obtenus avec différentes valeurs de Mode de traitement (toutes les autres conditions identiques) :
| Plus rapide | Plus complet |
|---|---|
|
|
|
|
2.4.3. Puissance laser
Description |
Réglez la puissance du projecteur laser, ce qui affecte la luminosité de la lumière structurée projetée. |
|---|---|
Visibilité |
Expert, Gourou |
Valeurs |
50 à 100% |
Instruction |
En général, l’utilisation de la valeur par défaut est suffisante.
|
3. Traitement du nuage de points
Le réglage des paramètres de la catégorie Traitement du nuage de points peut améliorer la qualité du nuage de points.
3.1. Lissage de surface
Description |
Ce paramètre réduit les fluctuations de profondeur dans le nuage de points et améliore sa ressemblance avec la surface réelle de l’objet. |
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
|
Instructions |
|
Nuages de points obtenus avec différentes valeurs de Lissage de surface (toutes les autres conditions identiques):
| Désactivé | Faible |
|---|---|
|
|
Normal |
Fort |
|
|
3.2. Suppression des valeurs aberrantes
Description |
Ce paramètre supprime les points aberrants du nuage de points. Les points aberrants sont des points groupés éloignés du nuage de points de l’objet. |
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
|
Instructions |
|
Nuages de points obtenus avec différentes valeurs de Suppression des points aberrants (toutes les autres conditions identiques):
| Désactivé | Faible |
|---|---|
|
|
Normal |
Fort |
|
|
3.3. Suppression du bruit
Description |
Ce paramètre supprime le bruit dans le nuage de points, réduisant ainsi l’impact sur la précision et l’exactitude des calculs ultérieurs. Le bruit correspond aux points dispersés proches de la surface de l’objet. |
|---|---|
Visibility |
Expert, Gourou |
Values |
|
Instructions |
|
Nuages de points obtenus avec différentes valeurs de Réduction du bruit (toutes les autres conditions identiques):
| Désactivé | Faible |
|---|---|
|
|
Normal |
Fort |
|
|
| Si cette fonction supprime des caractéristiques d’objet nécessaires, veuillez réduire l’intensité. Cependant, davantage de bruit sera conservé. |
3.4. Préservation des arêtes
Description |
Ce paramètre conserve la netteté des arêtes de l’objet lors du lissage de surface. |
|---|---|
Visibility |
Expert |
Values |
|
Instructions |
Ajustez en fonction de vos besoins de préservation des arêtes des pièces. |
3.5. Seuil de contraste des franges
Description |
Ce paramètre sert à supprimer le bruit dans le nuage de points. Ajustez ce paramètre si le niveau de bruit dans le nuage de points reste élevé après avoir ajusté Suppression des valeurs aberrantes et Suppression du bruit. |
|---|---|
Visibility |
Débutant, Expert, Guru |
Values |
1 à 100 |
Instructions |
|
Nuages de points obtenus avec différentes valeurs de Seuil de contraste des franges (toutes les autres conditions identiques) :
| 3 | 15 | 30 |
|---|---|---|
|
|
|
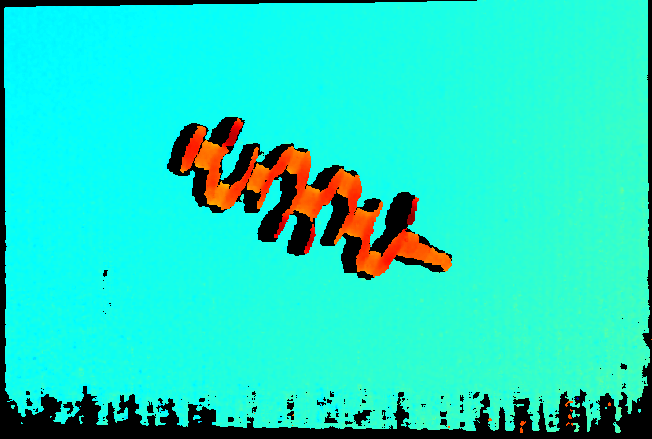
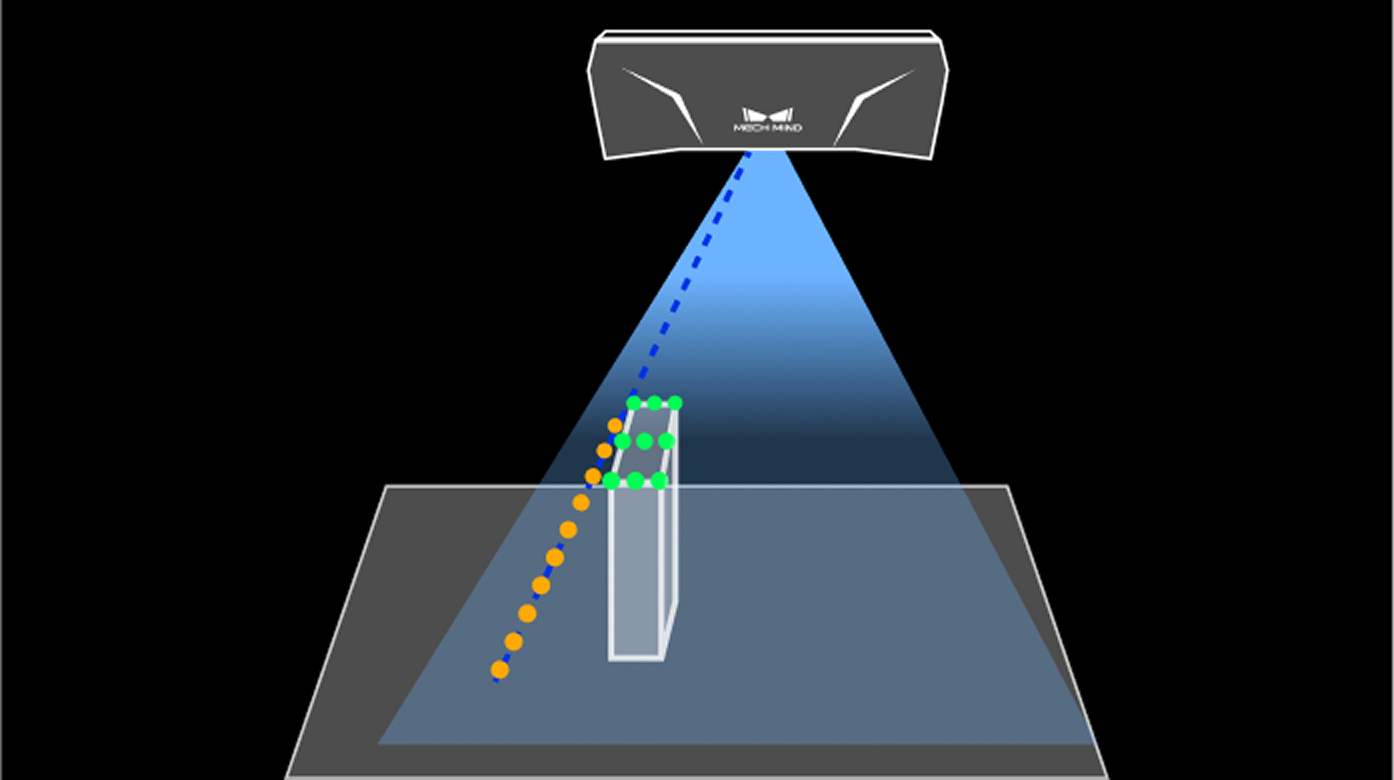
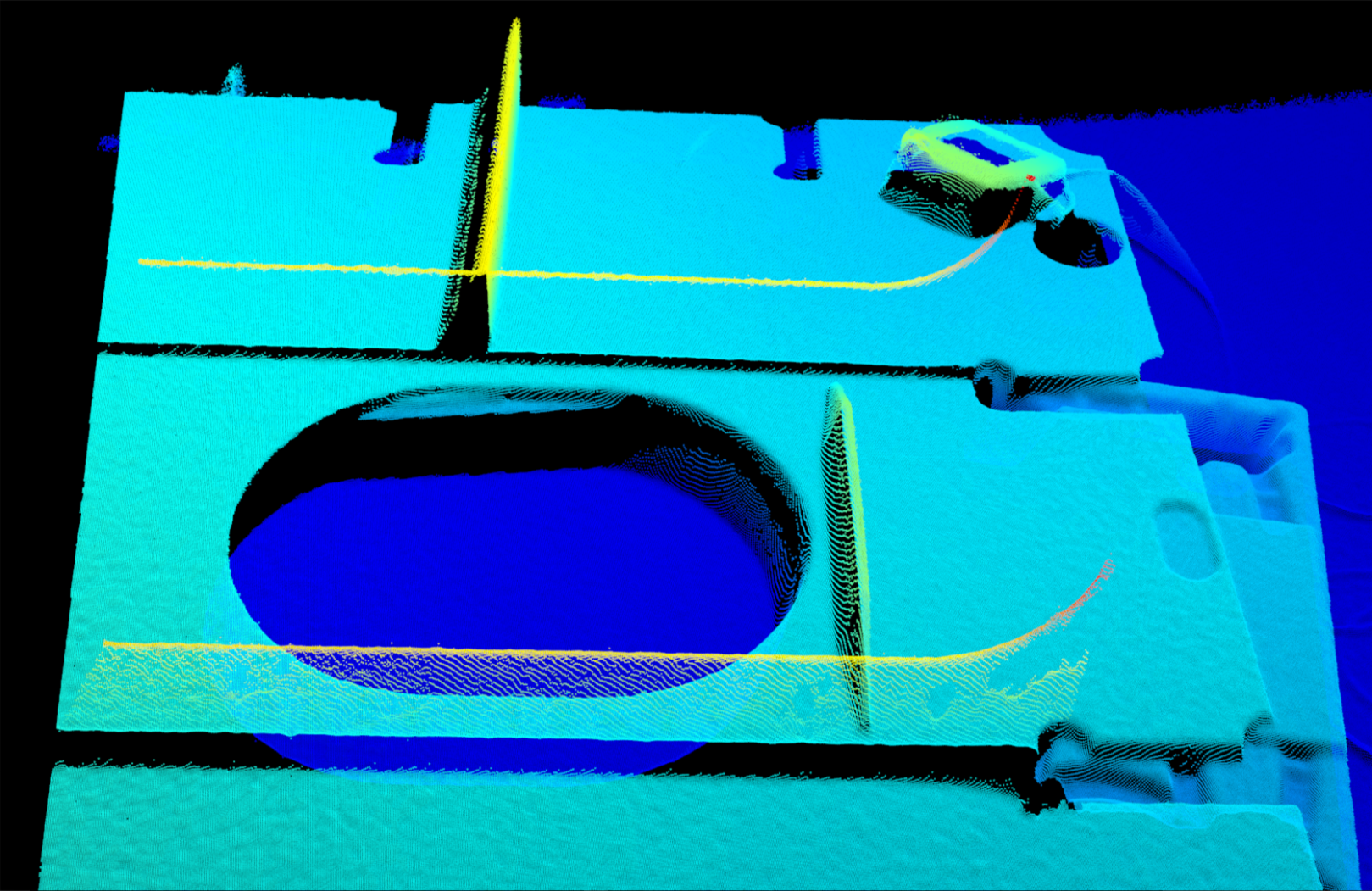
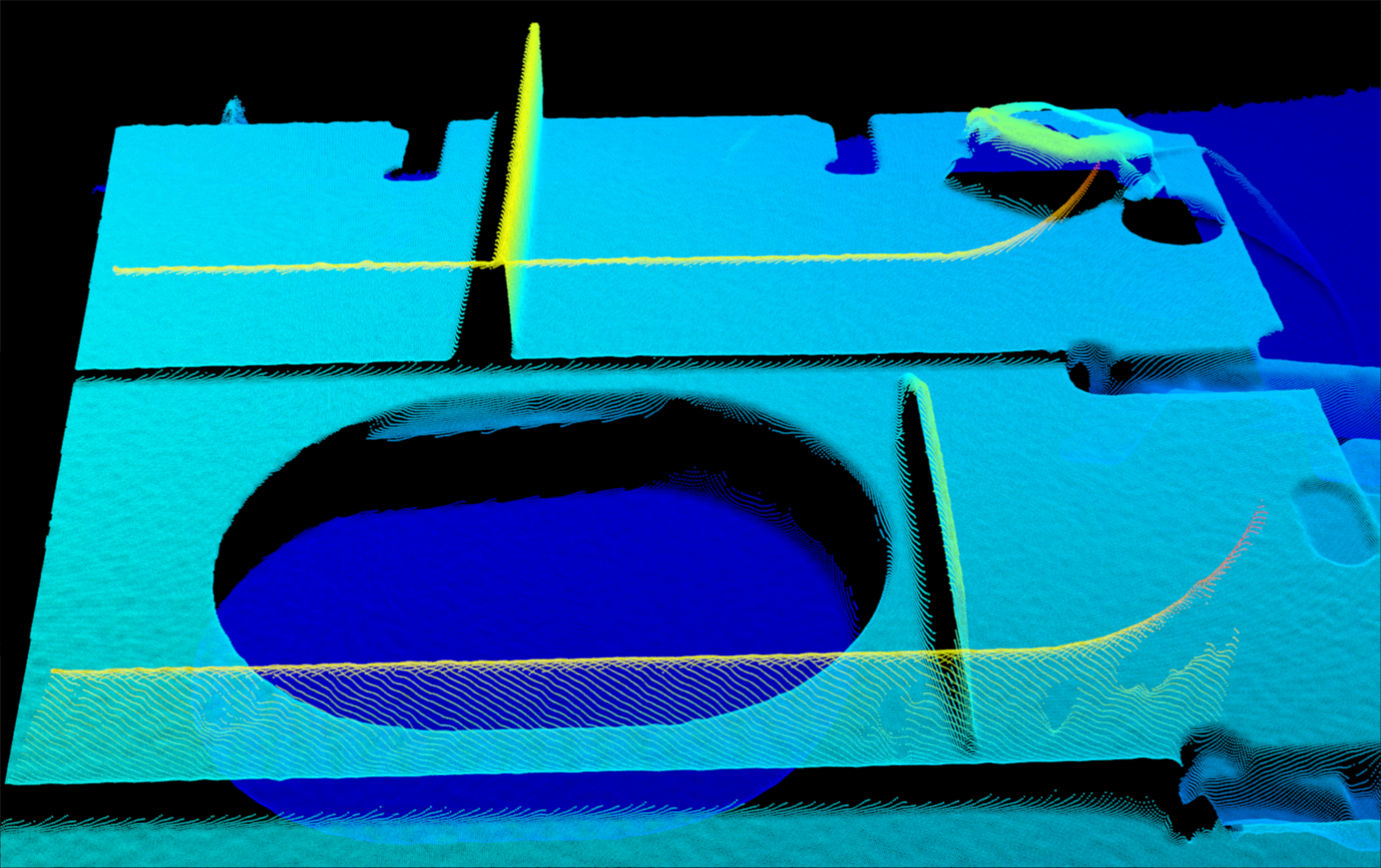
3.6. Suppression des artefacts de bord
Description |
Ce paramètre supprime les artefacts présents dans le nuage de points des régions du contour externe ou des courbures géométriques d’un objet. Les artefacts sont des données erronées qui n’existent pas réellement aux bords de l’objet. Cependant, ils sont générés dans le nuage de points en raison d’une occlusion du champ de vision ou d’autres facteurs. |
|---|---|
Visibilité |
Expert, Gourou |
Valeurs |
Désactivé par défaut. |
Instructions |
|
|
Dans cette image, les points jaunes sont des artefacts.
|
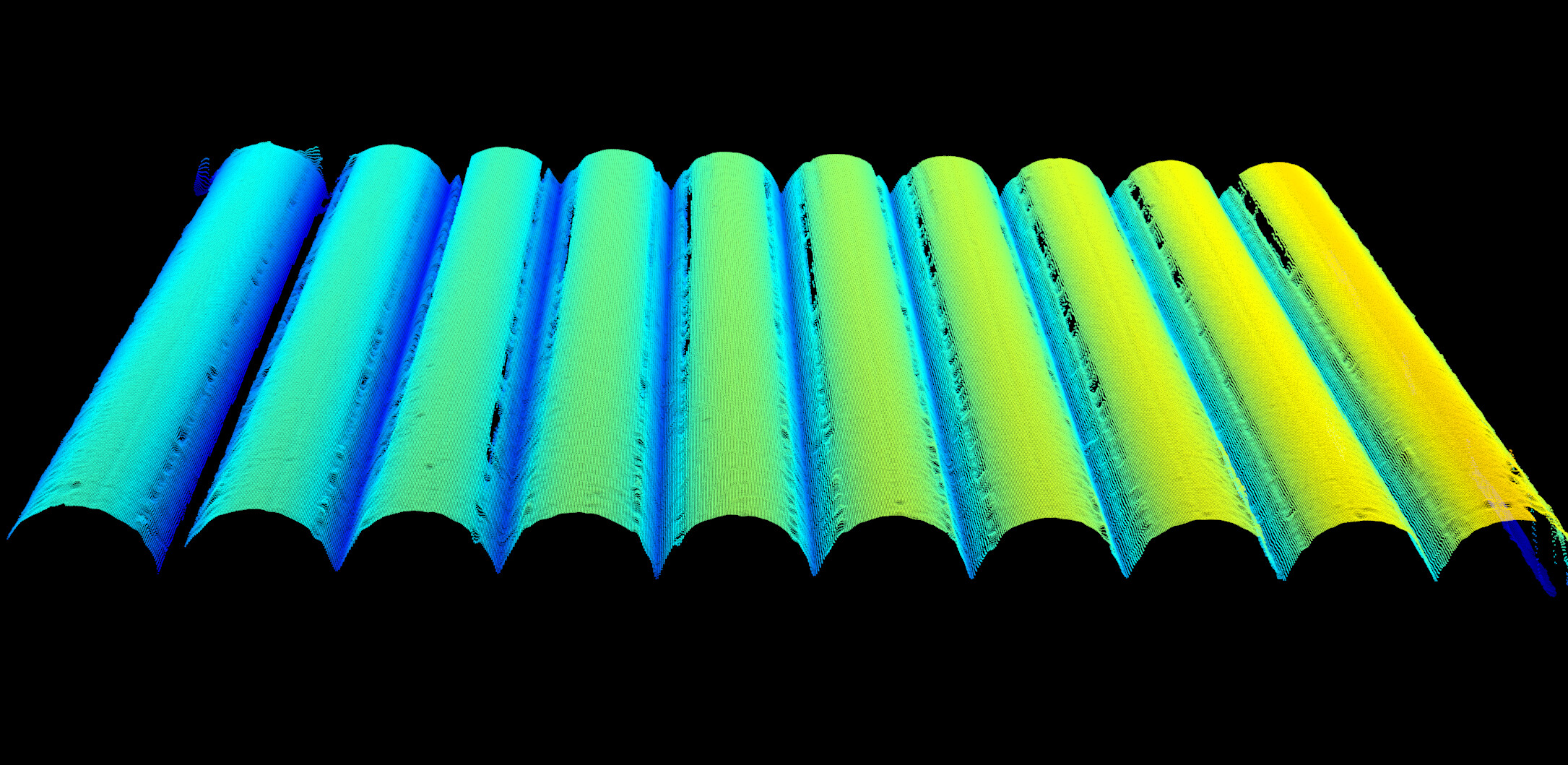
Nuages de points lorsque Suppression des artefacts de bord est désactivée ou activée:
| Désactivé | Activé |
|---|---|
|
|
4. Plage de profondeur
Description |
Définissez une ROI selon l’axe Z pour la carte de profondeur et le nuage de points. Plage de profondeur peut être définie dans la distance de travail du Caméra, et les données hors de cette plage sont supprimées de la carte de profondeur et du nuage de points. |
|---|---|
Visibility |
Débutant, Expert, Guru |
Values |
|
Instructions |
|
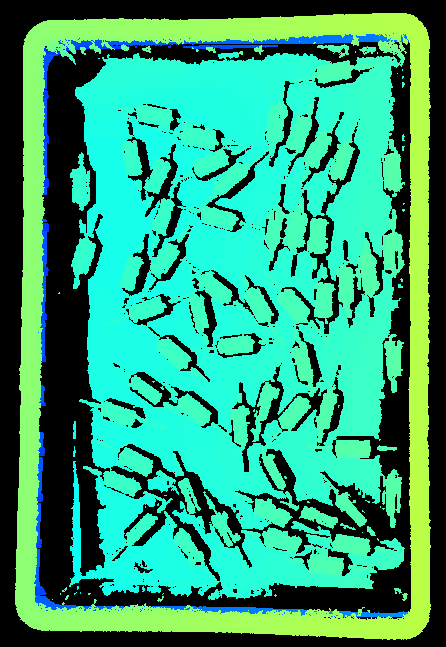
Le même nuage de points avec différentes valeurs de Plage de profondeur (toutes les autres conditions identiques) :
| Trop large | Appropriée | Trop petite |
|---|---|---|
|
|
|
|
|
|


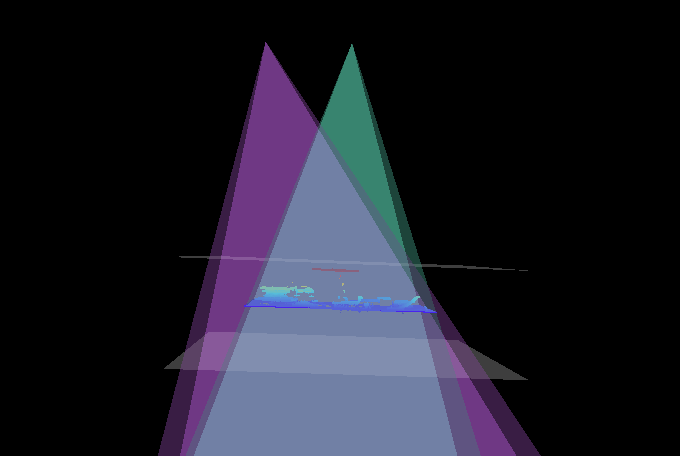
Définir la plage de profondeur
Suivez ces étapes pour ajuster la Plage de profondeur :
-
Cliquez sur Modifier à droite de Plage de profondeur pour ouvrir la fenêtre Définir la plage de profondeur.
-
Cliquez sur Actualiser le nuage de points en haut du panneau droit pour obtenir le nuage de points le plus récent.
-
Ajuster la position du nuage de points : ajustez la position jusqu’à ce que vous puissiez voir les deux rectangles gris qui représentent les limites supérieure et inférieure de Plage de profondeur.
-
Ajustez la plage de profondeur : faites glisser les poignées du curseur pour régler grossièrement la Plage de profondeur. Ensuite, saisissez des valeurs spécifiques à droite pour affiner la Plage de profondeur.
Déterminez si la plage de profondeur est appropriée : toutes les caractéristiques d’objet nécessaires se situent entre les deux rectangles gris, et la plupart des bruits et valeurs aberrantes se trouvent à l’extérieur. -
Cliquez sur Enregistrer pour sauvegarder les paramètres de la plage de profondeur.
|
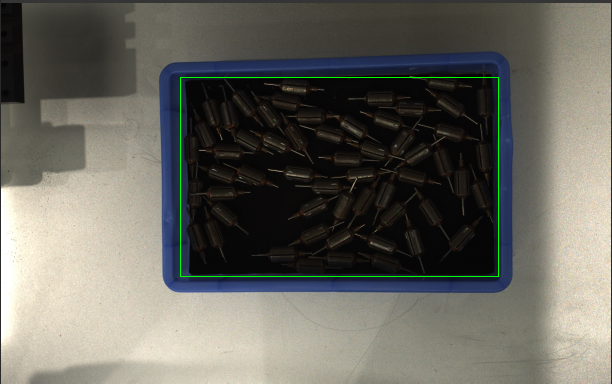
5. ROI
Description |
Définissez la ROI sur le plan XY pour la carte de profondeur et le nuage de points. Les points situés en dehors de la région sélectionnée sont supprimés. |
|---|---|
Visibilité |
Débutant, Expert, Gourou |
Valeurs |
N/A |
Instructions |
Pour des instructions détaillées, consultez Définir la ROI ci-dessous. |
Définir la ROI
-
Cliquez sur Modifier à droite de ROI pour ouvrir la fenêtre Définir la ROI.
-
Sélectionnez et ajustez la ROI sur la gauche. Faites glisser la boîte de sélection pour la déplacer. Faites glisser les poignées sur la boîte pour ajuster la taille de la boîte.
-
Cliquez sur Appliquer pour appliquer la ROI définie.
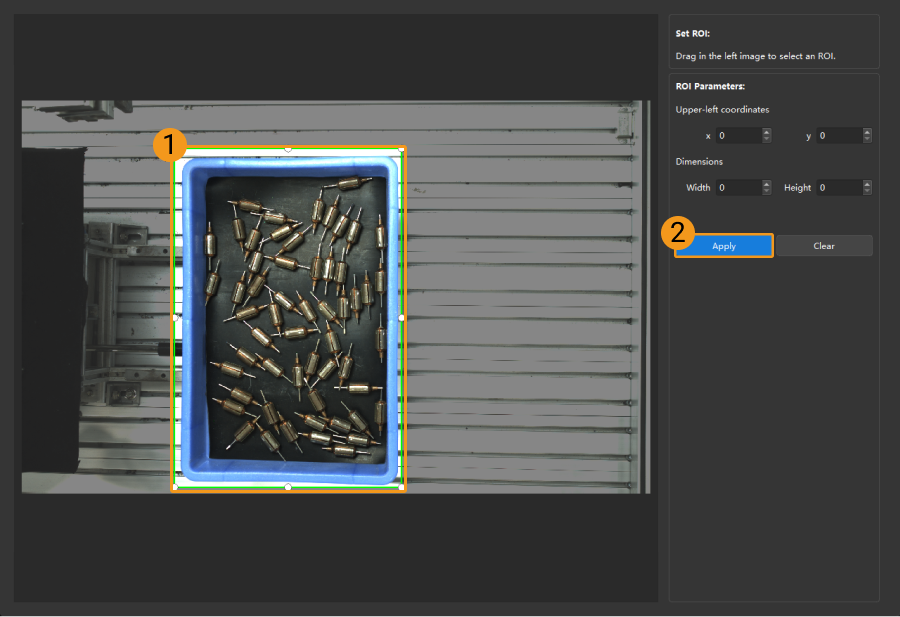
-
Cliquez sur Effacer pour supprimer la ROI actuelle.
-
L’interface affiche l’image 2D (source de profondeur). Si l’image est trop sombre ou trop lumineuse, veuillez ajuster Mode d’exposition dans la sous-catégorie Image 2D (source de profondeur).
-
-
Acquérez à nouveau des données et affichez la carte de profondeur ou le nuage de points pour vérifier le résultat de la définition de la ROI.