Prise en main
Ce sujet vous guidera tout au long du processus, depuis la vérification du contenu du colis jusqu’à l’utilisation de Mech-Eye Viewer pour capturer des images.
|
Les schémas sont fournis à titre illustratif uniquement. Le produit réel peut différer. |
1. Vérifier le contenu du colis
-
Assurez-vous que le colis de la caméra est intact à sa réception.
-
Vérifiez le contenu conformément à la « liste d’emballage » figurant dans le colis afin de vous assurer qu’aucun appareil ni accessoire ne manque ou n’est endommagé.
| Le tableau ci-dessous est fourni à titre de référence uniquement. Veuillez considérer la « liste d’emballage » figurant dans le colis comme définitive. |
|
|
|
|
|
|
|
|
|
|
Vis à tête cylindrique à six pans creux M4 × 8 (Qté : 8) |
Vis à tête cylindrique à six pans creux M5 × 8 (Qté : 8) |
Vis à tête cylindrique à six pans creux M8 × 20 (Qté : 2) |
Boulons en T M8 × 20 (Qté : 2) |
|
|
Écrous M8 (Qté : 2) |
Écrous M8 à bride (Qté : 2) |
|
|
Rondelles M8 (Qté : 2) |
Goupilles cylindriques Ø6 × 10 (Qté : 4) |
Support pour colliers de serrage (Qté : 1) |
Colliers de serrage (Qté : 50) |
|
|
Clés hexagonales (Qté : 3) |
Plaque de calibration (uniquement UHP-140-GL) |
|
|
|
Outre le colis de la caméra, vous pouvez également recevoir les accessoires optionnels suivants (si achetés) :
|
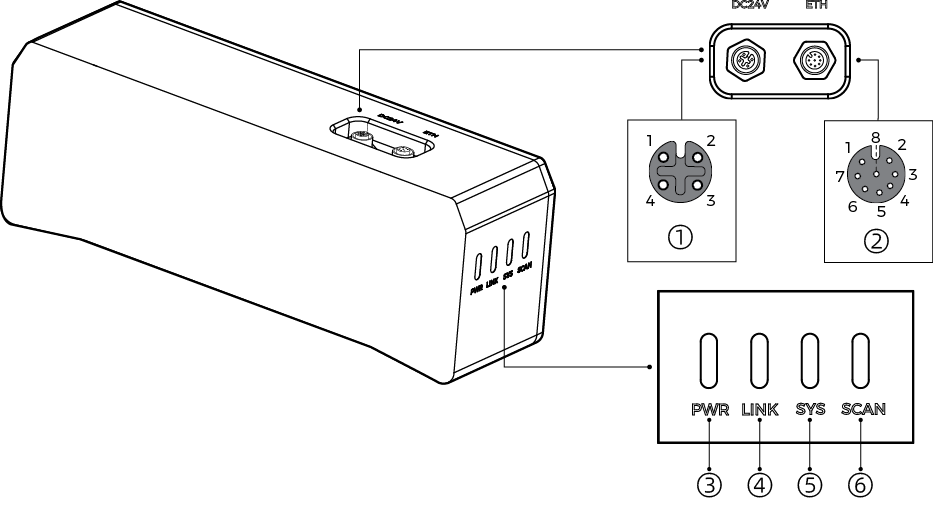
2. Vérifier les ports et les voyants
Veuillez vous référer aux figures et tableaux suivants et vérifier les fonctions des ports et des voyants de la caméra.
2.1. DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, et UHP-140-GL
N° |
Nom |
Fonction |
|
|---|---|---|---|
① |
Port DC 24V |
1: GND |
3: 24 VDC |
2: GND |
4: 24 VDC |
||
② |
Port ETH |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
③ |
Voyant PWR |
Éteint: non connecté à l’alimentation |
|
Vert: tension normale |
|||
Jaune fixe: tension inférieure à 16 V ou supérieure à 28 V |
|||
Rouge fixe: tension inférieure à 12 V |
|||
④ |
Voyant LINK |
Éteint: non connecté au réseau |
|
Vert fixe ou clignotant: connecté au réseau |
|||
⑤ |
Voyant SYS |
Éteint: caméra non démarrée |
|
Vert fixe: démarrage de la caméra |
|||
Vert clignotant: fonctionnement normal de la caméra |
|||
Jaune clignotant: tension instable ou température anormale |
|||
Rouge clignotant: dysfonctionnement |
|||
⑥ |
Voyant SCAN |
Vert fixe: acquisition et traitement des données |
|
Pas d’acquisition ni de traitement de données |
|||
2.2. NANO-GL et NANO ULTRA-GL
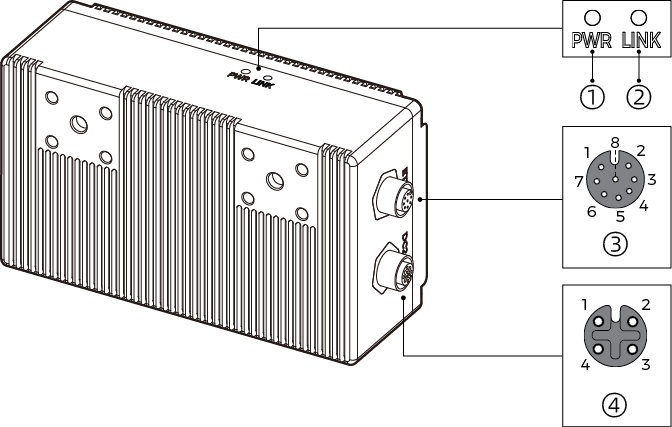
|
La figure ci-dessus utilise NANO-GL à titre d’exemple. |
N° |
Nom |
Fonction |
|
|---|---|---|---|
① |
Voyant PWR |
Éteint: non connecté à l’alimentation |
|
Vert: tension normale |
|||
② |
Voyant LINK |
Éteint: non connecté au réseau |
|
Vert fixe ou clignotant: connecté au réseau |
|||
③ |
Port ETH |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
④ |
Port DC 24V |
1: GND |
3: 24 VDC |
2: GND |
4: 24 VDC |
||
3. Installer la caméra
La caméra peut être montée selon les configurations suivantes :
| Configuration | Exigences |
|---|---|
Montée sur la bride du robot et se déplace avec le robot. 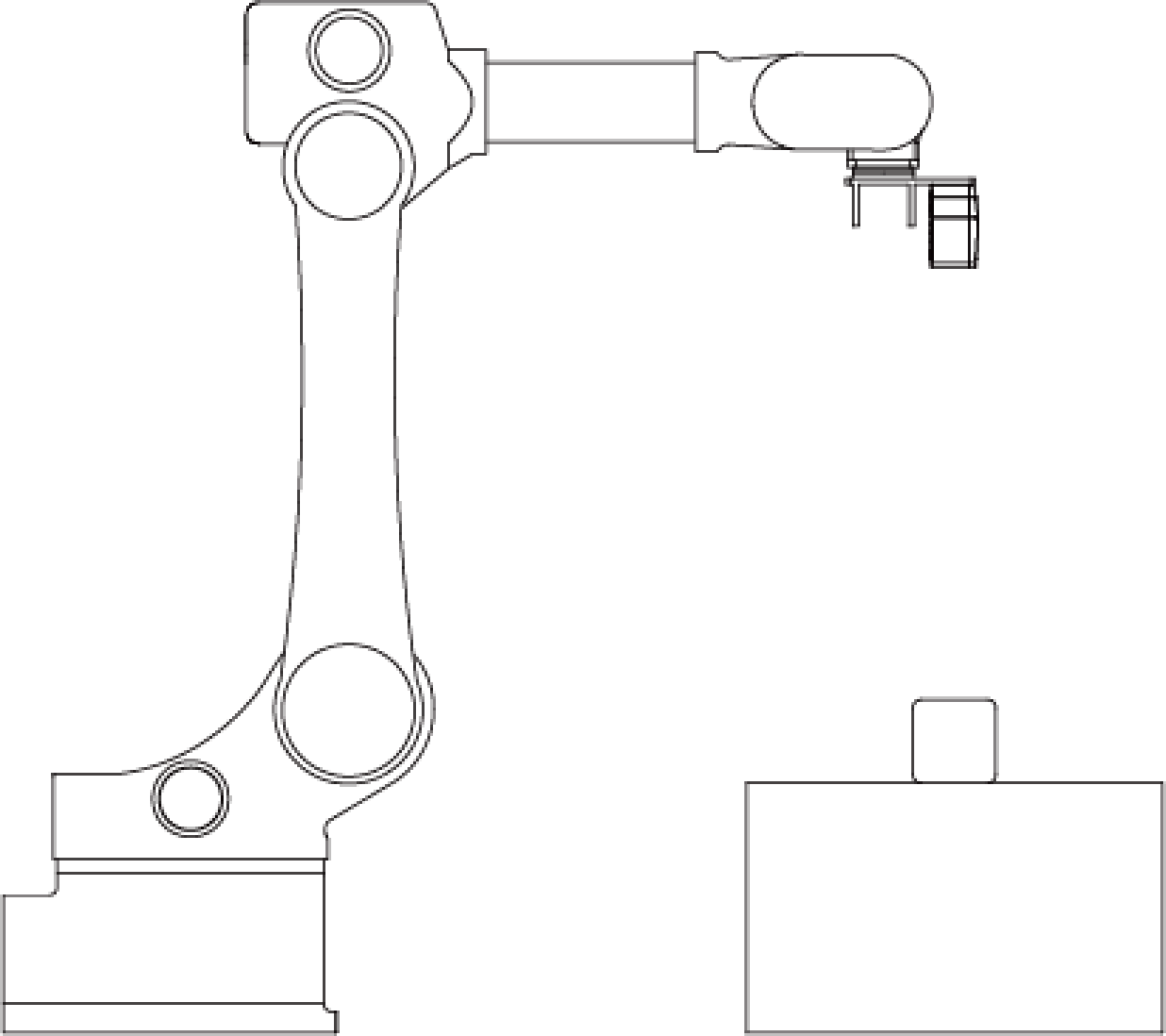
|
|
Montée sur une structure fixe et ne se déplace pas avec le robot. 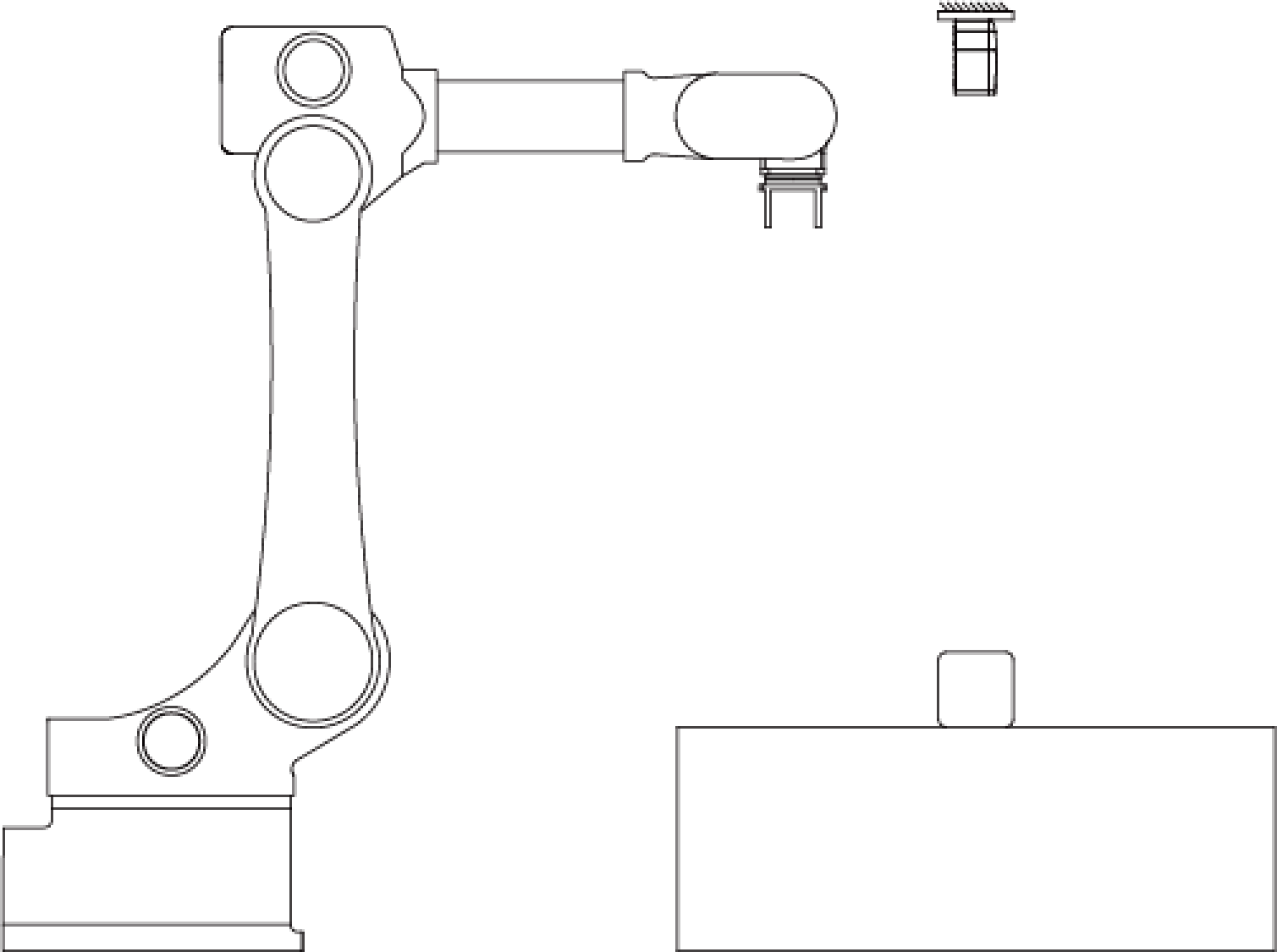
|
|
Montée sur un rail linéaire et se déplace avec le rail linéaire. 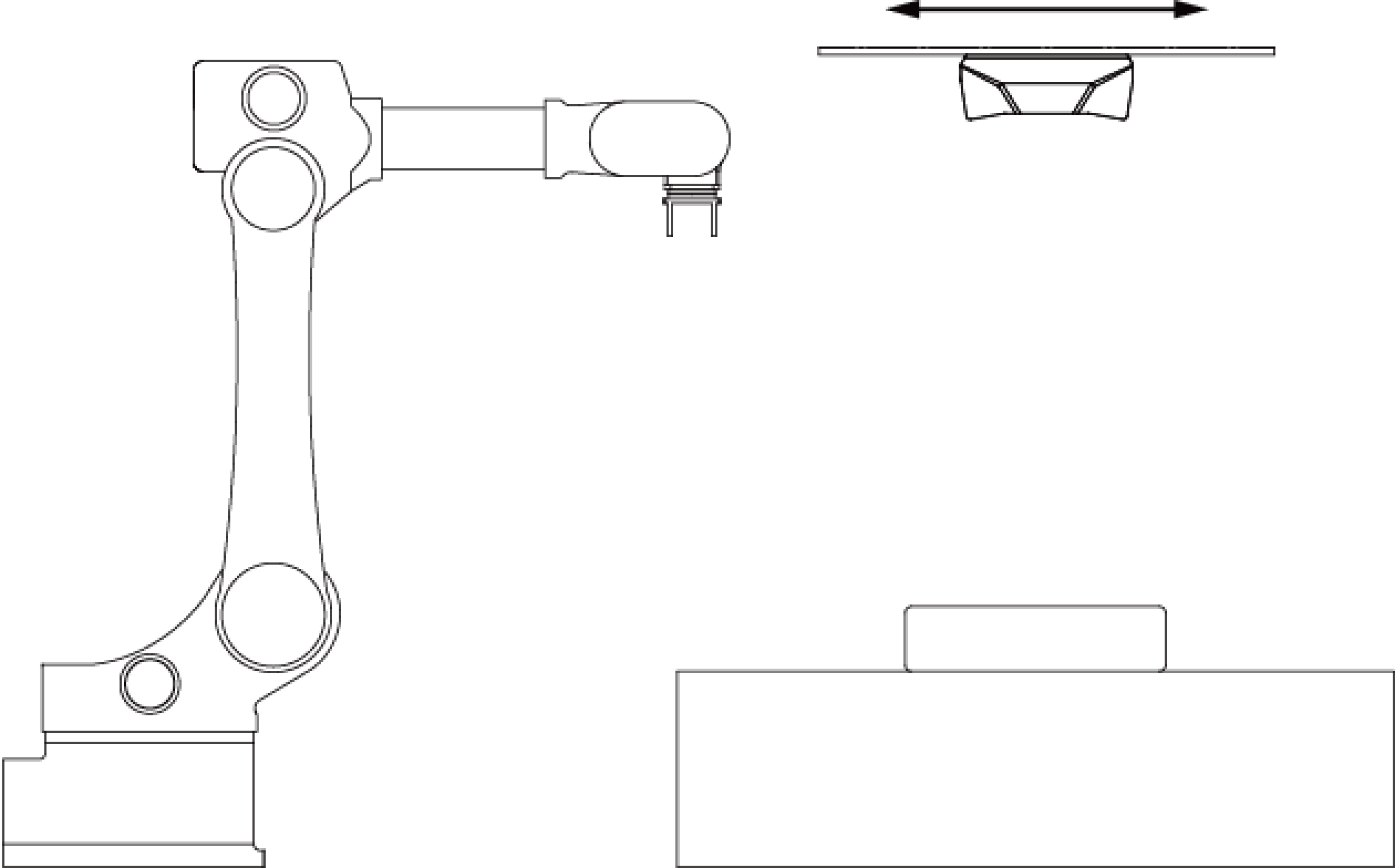
|
|
|
Après avoir déterminé la configuration, référez-vous aux sections suivantes et fixez la caméra sur la surface de montage via le support de caméra ou des trous taraudés.
|
3.1. Monter via le support de caméra
À l’aide du support de caméra, vous pouvez monter la caméra sur les types de surfaces suivants :
-
Profilé en aluminium à rainure en T
-
Surface avec des trous de fixation percés
|
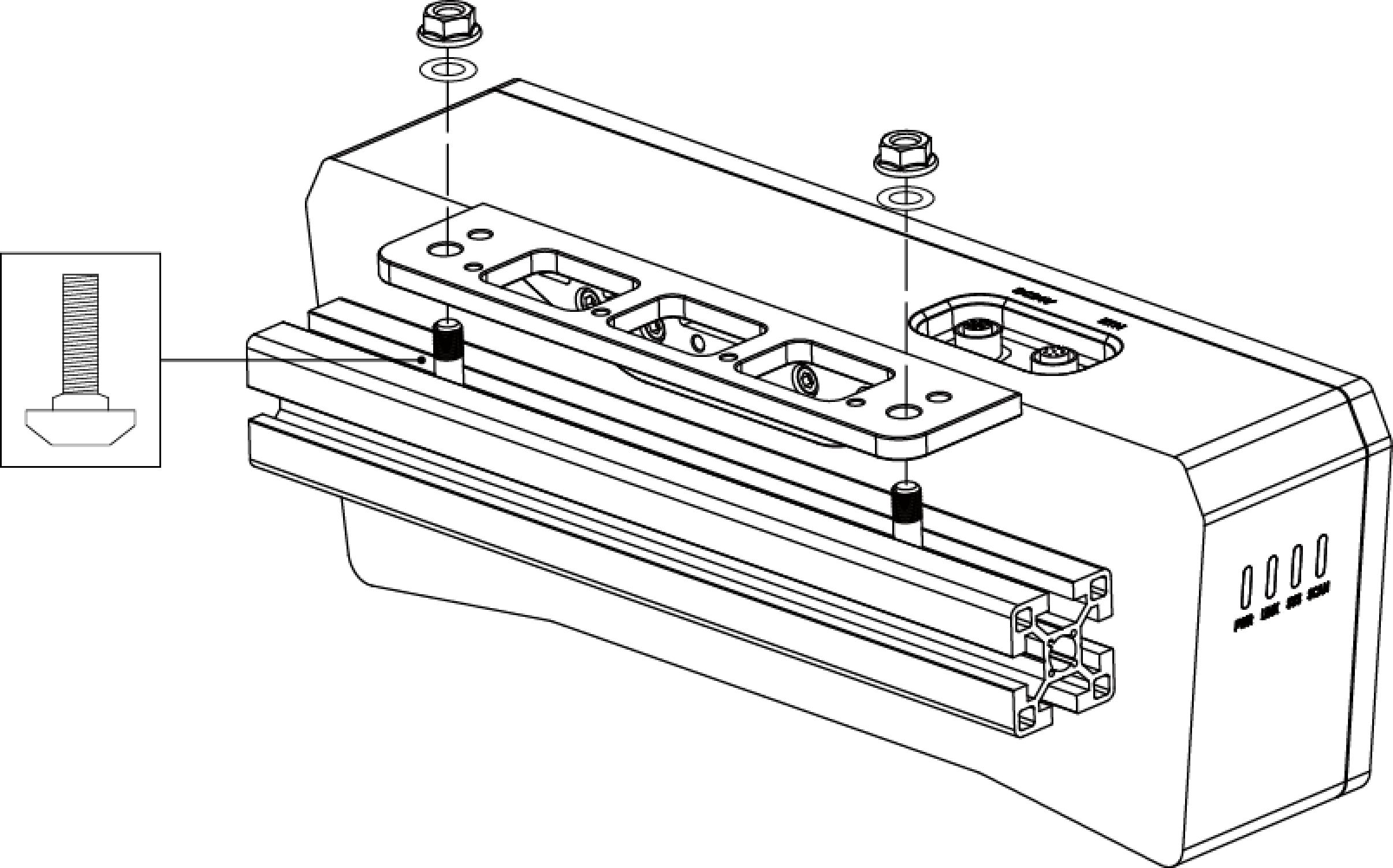
3.1.1. Monter sur un profilé en aluminium à rainure en T
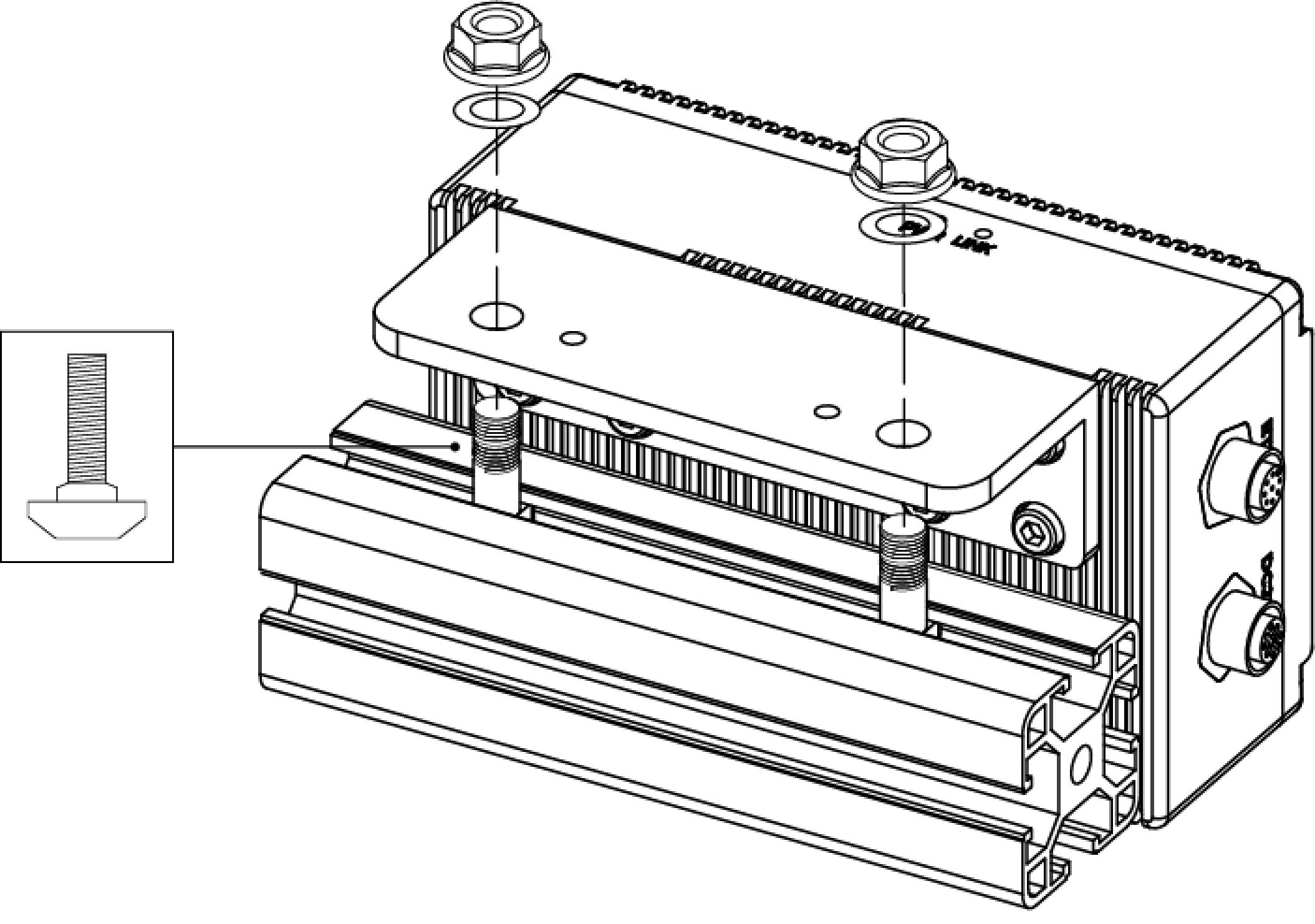
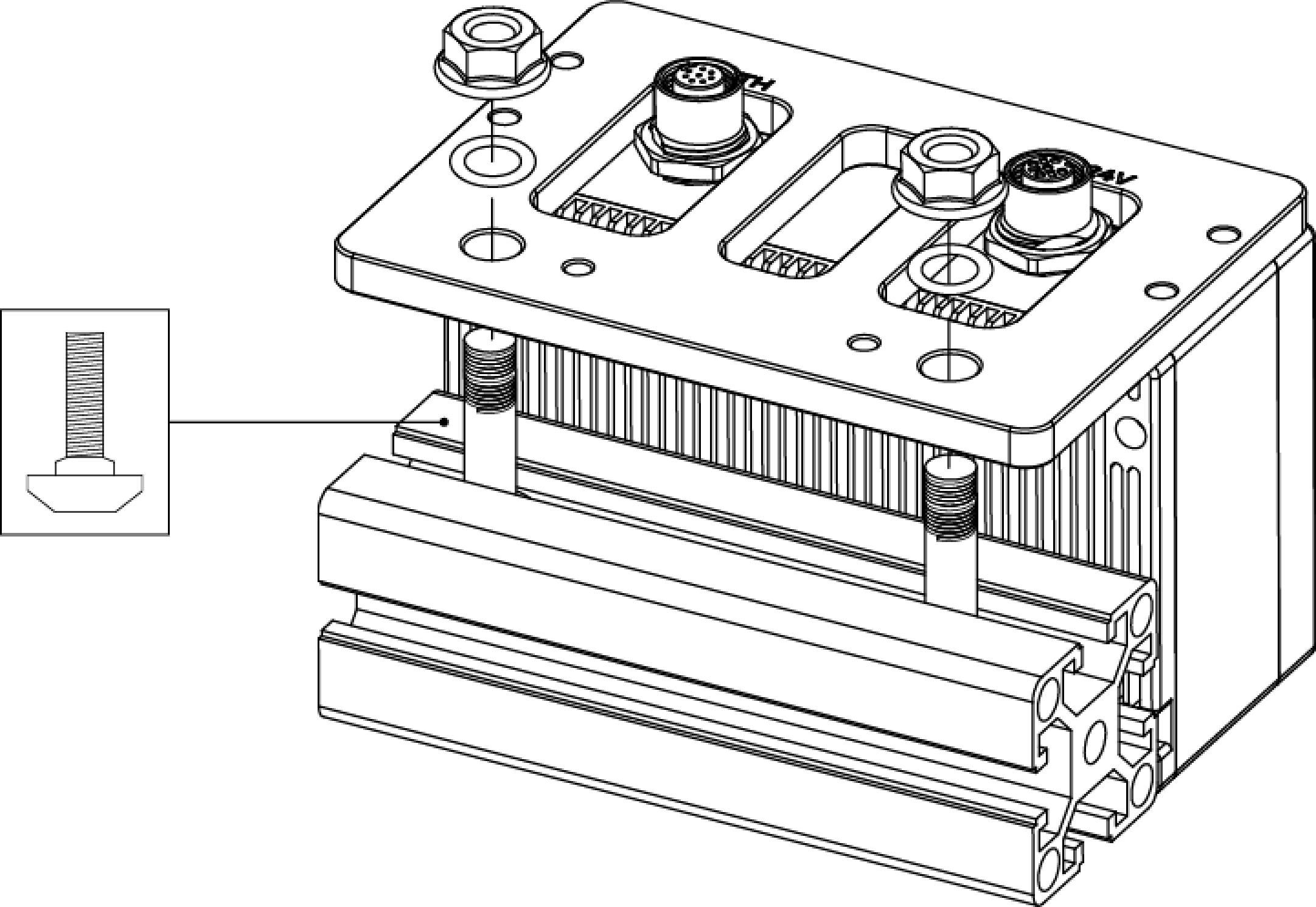
Comme illustré ci-dessous, placez 2 rondelles M8 et 2 boulons en T M8 × 20, puis utilisez la clé plate pour serrer 2 écrous à collerette. Le couple de serrage recommandé est de 12 à 13 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
3.1.2. Monter sur une surface avec des trous de fixation percés
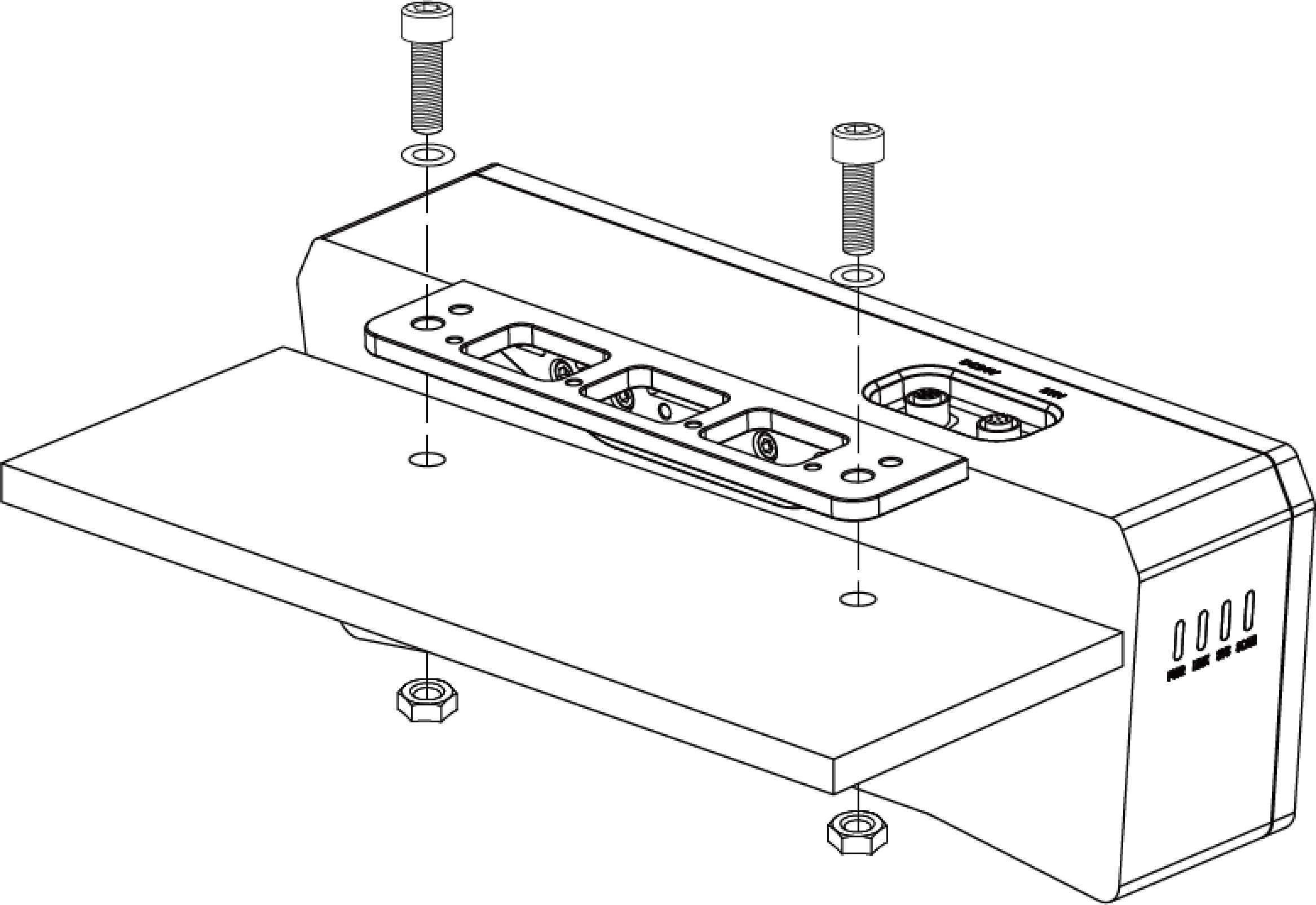
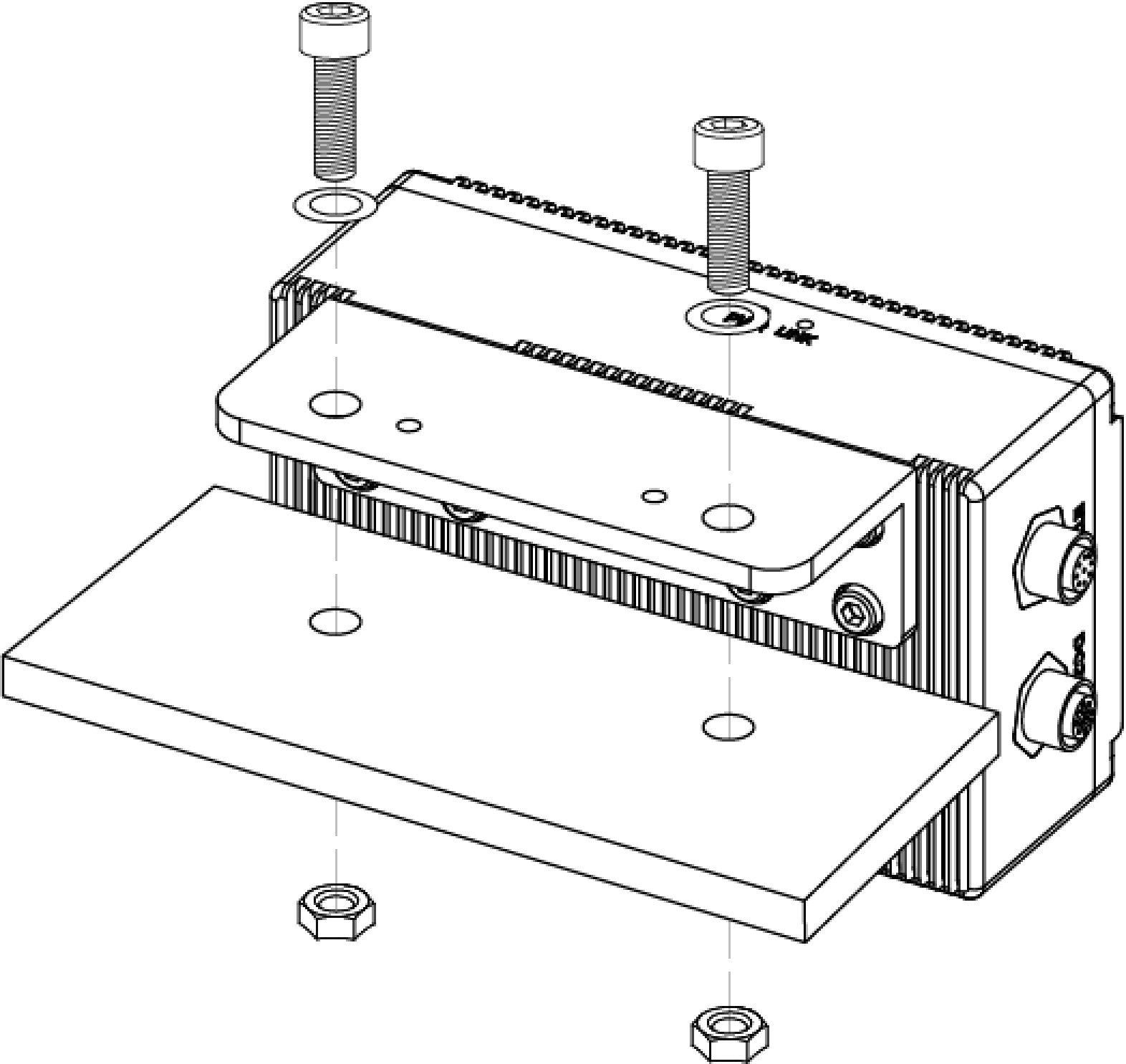
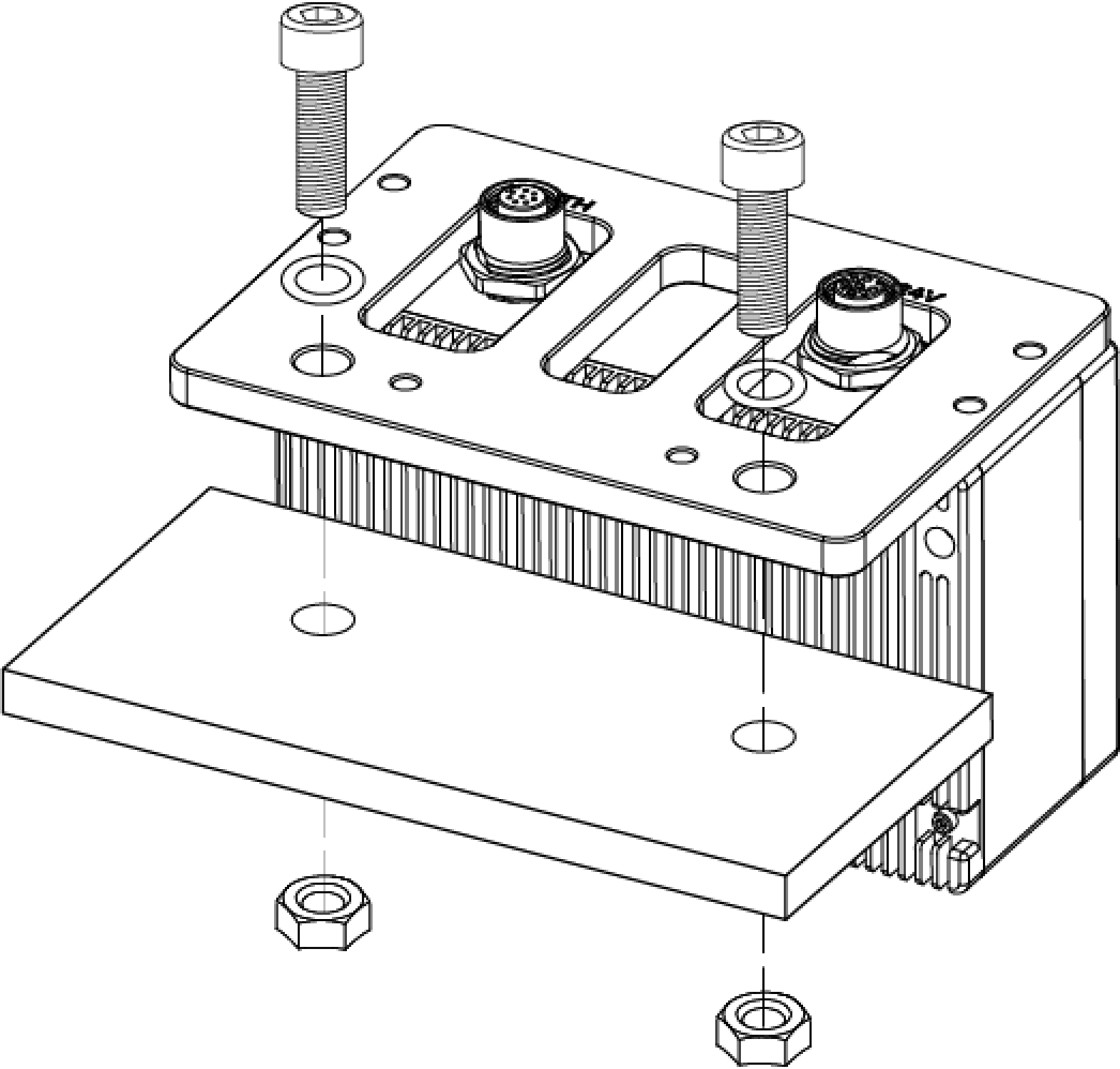
Comme illustré ci-dessous, placez 2 rondelles M8 et 2 vis à tête cylindrique à six pans creux M8 × 20, puis utilisez la clé plate pour serrer 2 écrous. Le couple de serrage recommandé est de 12 à 13 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
3.1.3. Monter le support d’attache-câble
Après avoir monté le support d’attache-câble, vous pouvez fixer les câbles avec des colliers pour éviter d’endommager les câbles par la traction.
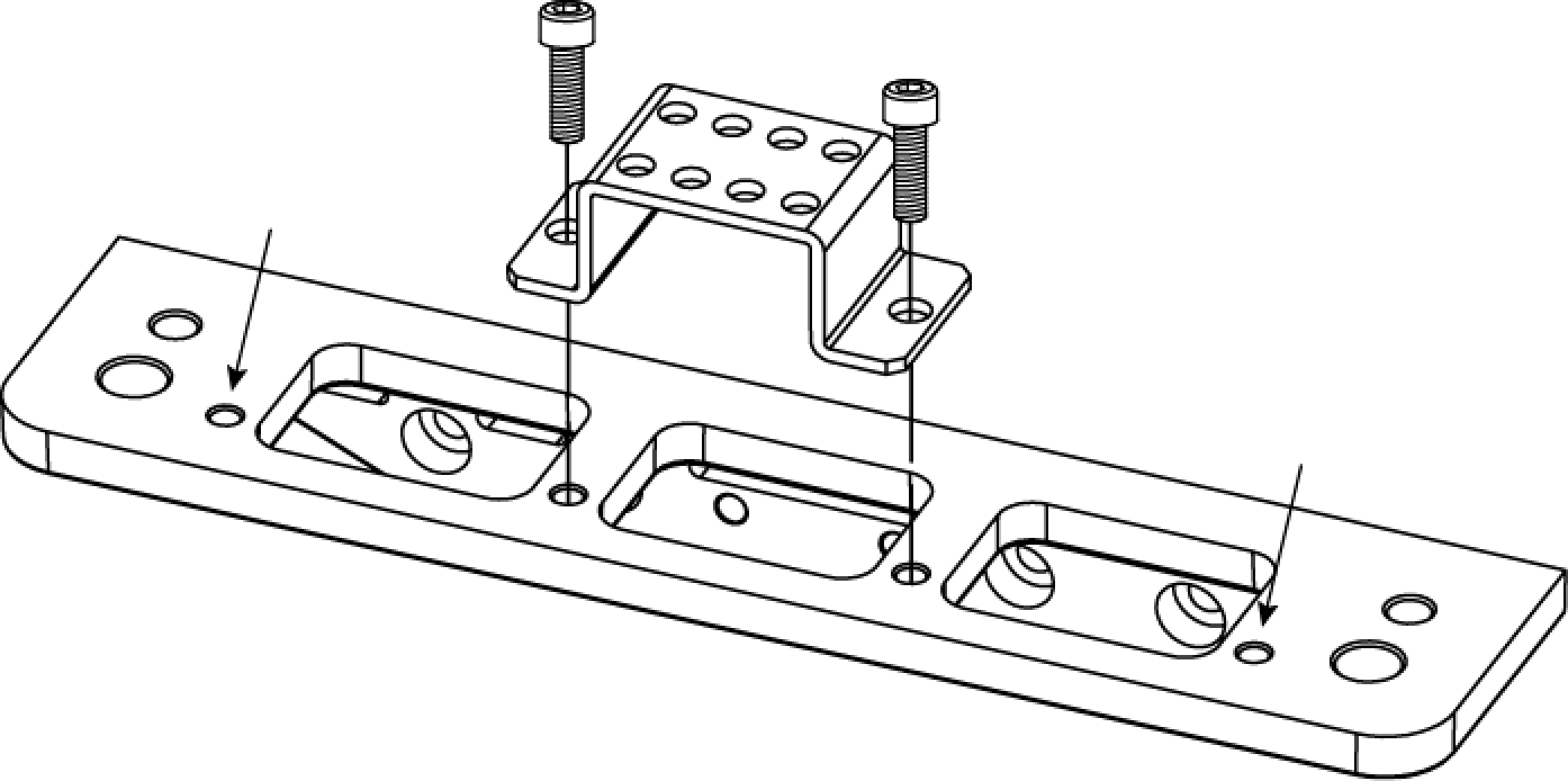
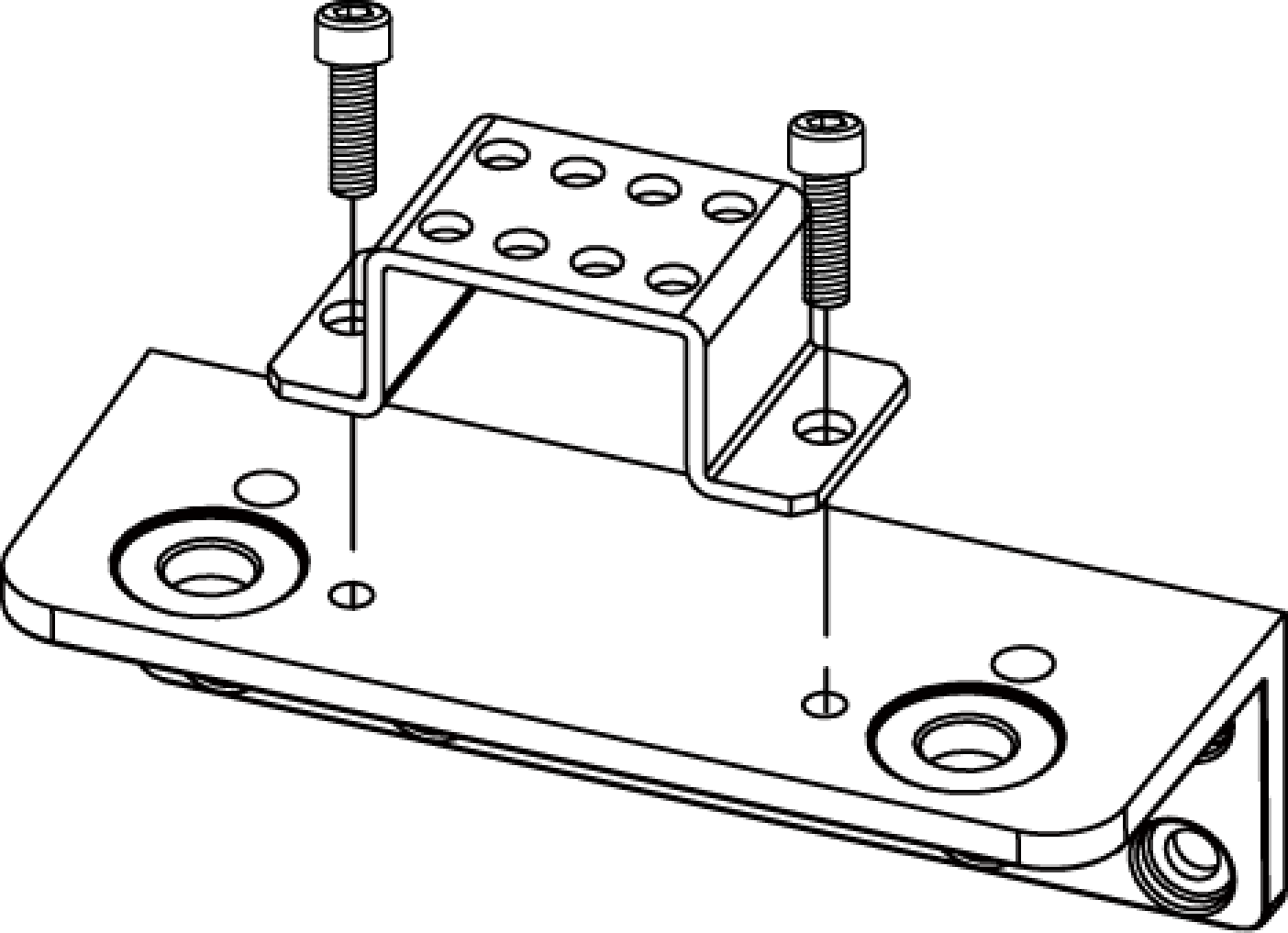
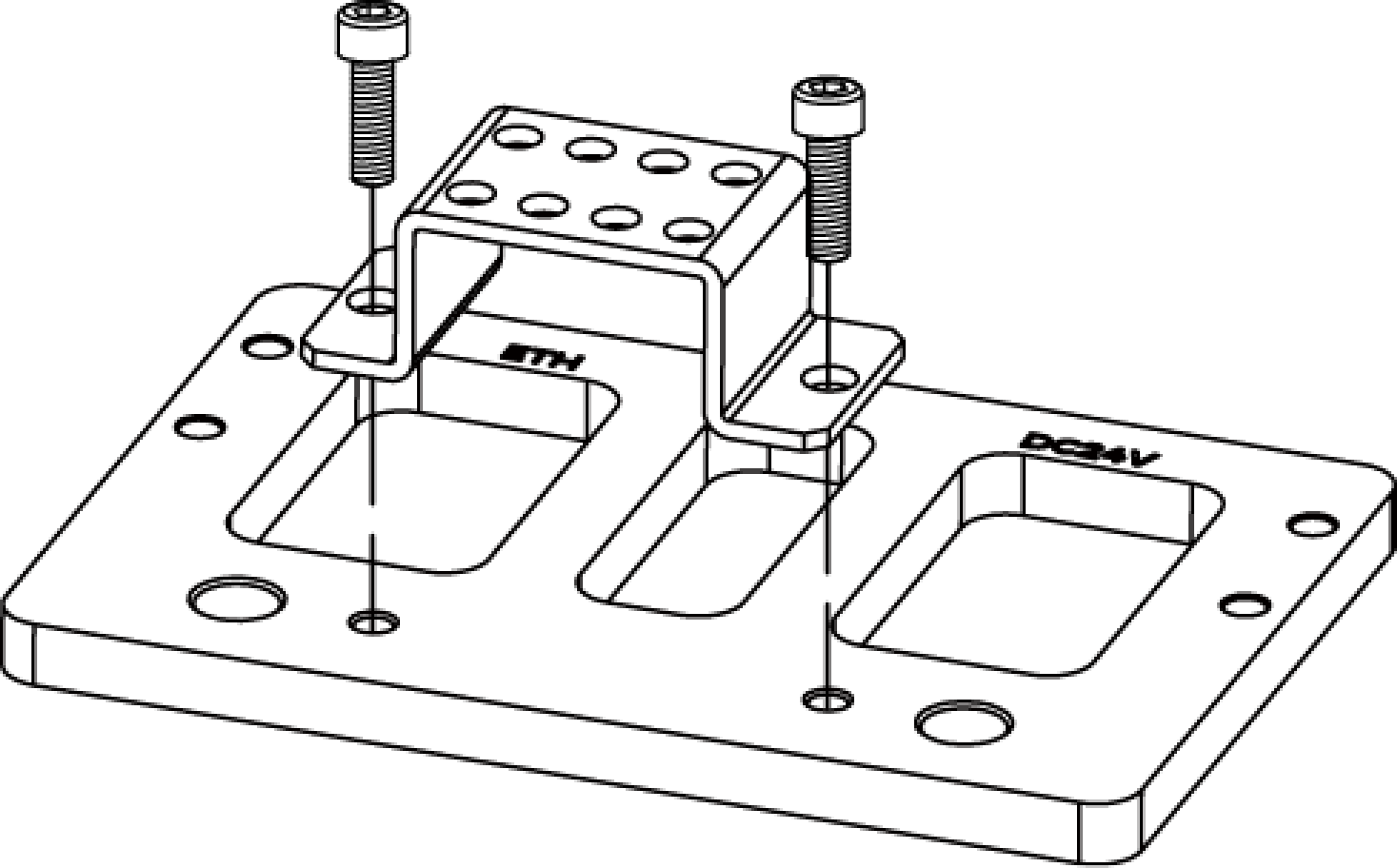
Comme illustré ci-dessous, utilisez la clé hexagonale pour serrer 2 vis à tête cylindrique à six pans creux M5 × 8. Le couple de serrage recommandé est de 2,2 à 2,5 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL: Vous pouvez utiliser les trous taraudés à différentes positions (indiquées par des flèches) pour monter le support d’attache-câble.
-
NANO-GL:
-
NANO ULTRA-GL:
3.2. Monter via les trous taraudés à l’arrière
|
Lors du montage de LSR S-GL et NANO ULTRA-GL avec cette méthode, veillez à ce que l’arrière de la caméra soit en contact étroit avec une surface métallique pour la dissipation thermique, afin que la caméra ne surchauffe pas et ne fonctionne pas mal. |
-
Utilisez la clé hexagonale pour retirer le support de caméra. Pour LSR S-GL et NANO ULTRA-GL, retirez également le panneau de dissipation thermique.
-
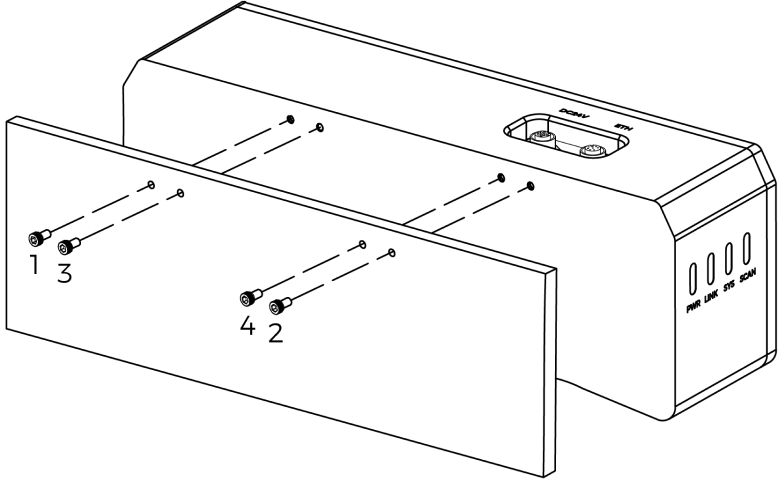
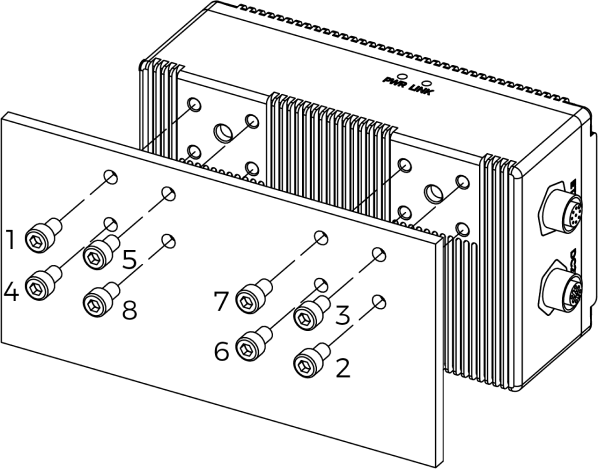
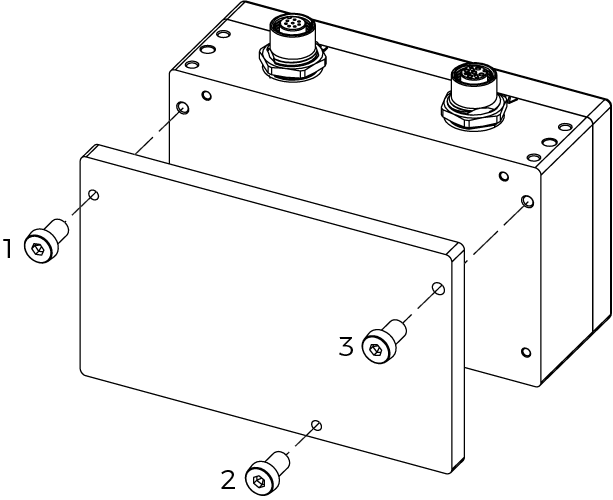
Comme illustré ci-dessous, placez les vis à tête cylindrique à six pans creux de la spécification correspondante dans les trous de montage. Ensuite, utilisez la clé hexagonale pour visser légèrement les vis dans l’ordre indiqué, puis serrez complètement tous les boulons dans l’ordre indiqué.
-
NANO ULTRA-GL: vis à tête cylindrique à six pans creux M4 × 8 (couple de serrage recommandé : 1,4 à 1,6 N·m)
-
Autres modèles : vis à tête cylindrique à six pans creux M5 × 8 (couple de serrage recommandé : 2,2 à 2,5 N·m)
Le nombre de vis nécessaires varie selon le modèle.
-
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, and UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
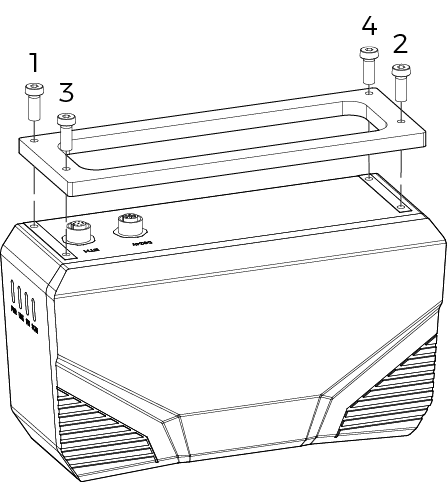
3.3. Monter via les trous taraudés sur le dessus
Les modèles suivants offrent des trous taraudés pour un montage sur le dessus : LSR S-GL, LSR XL-GL, NANO ULTRA-GL et UHP-140-GL.
-
Utilisez la clé hexagonale pour retirer le support de caméra.
-
Comme illustré ci-dessous, placez les vis à tête cylindrique à six pans creux de la spécification correspondante dans les trous de montage. Ensuite, utilisez la clé hexagonale pour visser légèrement les vis dans l’ordre indiqué, puis serrez complètement tous les boulons dans l’ordre indiqué.
-
NANO ULTRA-GL: vis à tête cylindrique à six pans creux M4 × 8 (couple de serrage recommandé : 1,4 à 1,6 N·m)
-
Autres modèles : vis à tête cylindrique à six pans creux M5 × 8 (couple de serrage recommandé : 2,2 à 2,5 N·m)
-
4. Brancher les câbles
Veuillez suivre ces étapes pour connecter les câbles Ethernet et d’alimentation de la caméra.
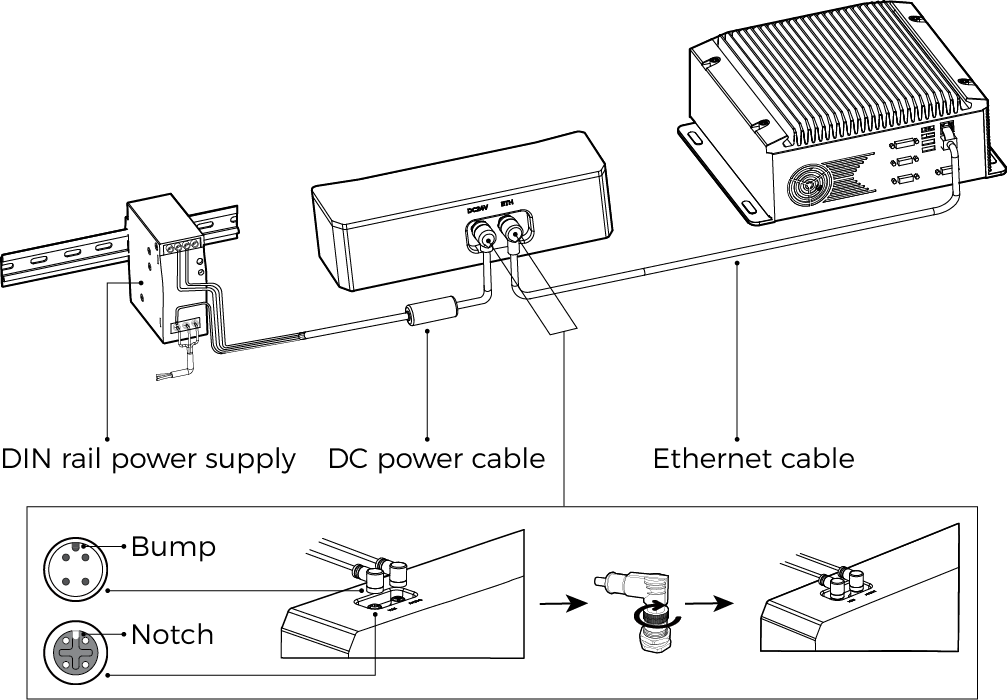
4.1. Câble Ethernet et câble d’alimentation DC
-
Câble Ethernet: Insérez le connecteur M12-A du câble Ethernet dans le port ETH de la caméra, et insérez le connecteur RJ45 dans le port Ethernet de l’IPC.
-
Câble d’alimentation DC: Insérez le connecteur M12-A du câble d’alimentation DC dans le port DC 24V de la caméra.
Lors de l’insertion du câble Ethernet et du câble d’alimentation DC:
-
Alignez l’ergot du connecteur avec l’encoche du port.
-
Serrez l’écrou. Le couple de serrage recommandé est de 0.7 N·m. Un jeu d’environ 2 mm subsiste une fois l’écrou complètement serré.
|
4.2. Alimentation sur rail DIN
|
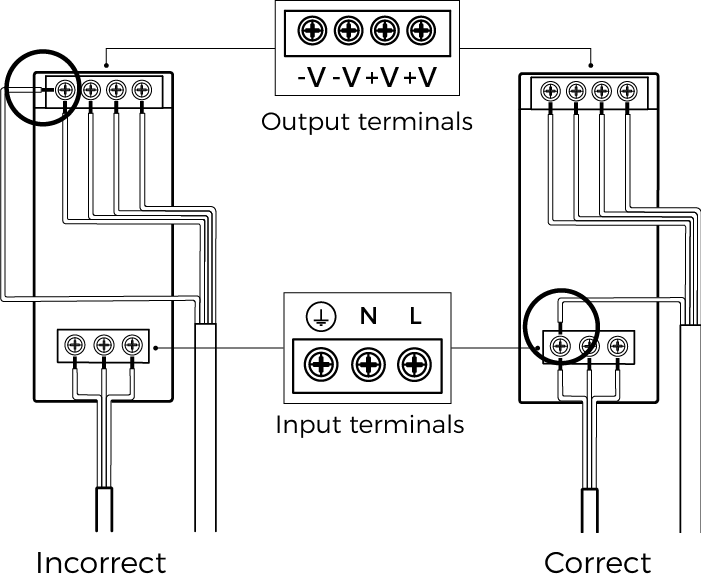
-
Utilisez un tournevis plat pour desserrer les vis sur les bornes de l’alimentation sur rail DIN.
-
Connectez le câble d’alimentation DC: Insérez les deux fils portant les étiquettes +V dans les deux bornes de sortie +V de l’alimentation sur rail DIN, les deux fils portant les étiquettes -V dans les deux bornes de sortie -V, et le fil portant l’étiquette PE dans la borne de terre (
 ).
). -
Connectez le câble d’alimentation AC: Insérez le fil de phase dans la borne d’entrée L de l’alimentation sur rail DIN, le fil neutre dans la borne d’entrée N, et le fil de terre dans la borne de terre (
). -
Utilisez le tournevis plat pour serrer les vis sur les bornes.
|
5. Préchauffage
Afin de garantir que la précision des données acquises par le produit atteigne les valeurs indiquées dans les spécifications techniques, veuillez utiliser Outil de préchauffage pour préchauffer le produit avant de l’utiliser.
-
Durée de préchauffage recommandée: 60 minutes pour UHP-140-GL et LSR S-GL, et 30 minutes pour les autres modèles.
-
Intervalle d’acquisition de données recommandé: Préchauffez le produit en utilisant l’intervalle d’acquisition de données en usage réel. Si l’intervalle d’acquisition de données en usage réel n’est pas fixe, il est recommandé de préchauffer avec l’intervalle d’acquisition moyen. Par exemple, en usage réel, des données sont acquises toutes les 6 à 10 secondes, puis pendant le préchauffage, les données doivent être acquises toutes les 8 secondes.
Le montage et le raccordement du matériel de la caméra sont terminés. Les sections suivantes expliquent comment utiliser Mech-Eye Viewer pour se connecter à la caméra et la contrôler afin de capturer des images.
6. Télécharger et installer Mech-Eye SDK
Vous pouvez télécharger le programme d’installation de Mech-Eye SDK depuis Centre de téléchargement Mech-Mind.
Après avoir décompressé le package d’installation, double-cliquez sur l’installateur pour installer Mech-Eye SDK. Pour plus d’informations, veuillez consulter Guide d’installation de Mech-Eye SDK.
7. Définir les adresses IP
Avant de connecter la caméra, assurez-vous que les adresses IP suivantes sont uniques et appartiennent au même sous-réseau.
-
Adresse IP de la caméra
-
L’adresse IP du port Ethernet de l’IPC connecté à la caméra
Suivez ces étapes pour définir l’adresse IP de la caméra :
-
Double-cliquez pour ouvrir Mech-Eye Viewer.
-
Recherchez la caméra à connecter et cliquez sur
 .
.
8. Se connecter à la caméra
-
Recherchez la caméra à connecter dans Mech-Eye Viewer, puis cliquez sur Connexion.
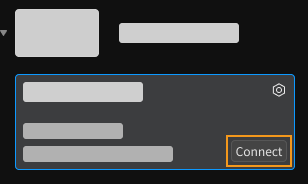
|
Si le logiciel ou le micrologiciel doit être mis à niveau, le bouton Mettre à niveau s’affiche à la place. Veuillez cliquer sur ce bouton pour effectuer la mise à niveau en premier, puis vous connecter à la caméra. |
9. Capturer des images
Cliquez sur ![]() pour effectuer une capture d’image unique.
pour effectuer une capture d’image unique.
|
Un clic sur |
Cliquez sur les types de données situés sous les boutons de capture pour consulter l’image 2D, la carte de profondeur et le nuage de points obtenus à partir de la caméra.
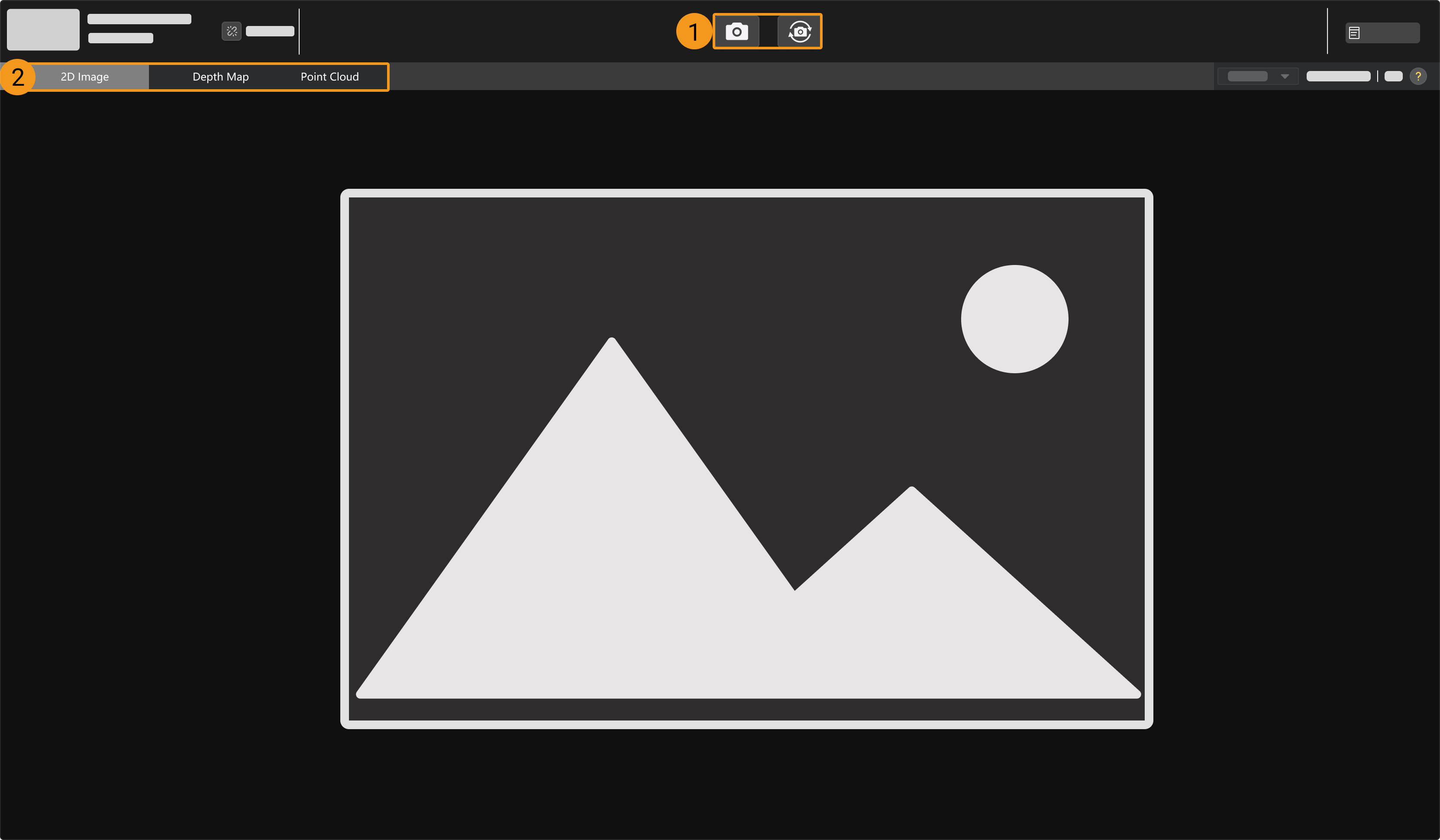
| Pour plus d’informations sur la capture d’images et les types de données, veuillez consulter Acquérir et afficher des données. |
10. Ajuster les paramètres
Si la qualité de l’image 2D, de la carte de profondeur et du nuage de points obtenus n’est pas satisfaisante, vous pouvez ajuster les paramètres correspondants dans l’onglet Paramètres à droite du logiciel afin d’améliorer la qualité des données.
10.1. Déterminer la qualité des données
Sur la base des critères suivants, déterminez approximativement la qualité des données obtenues.
-
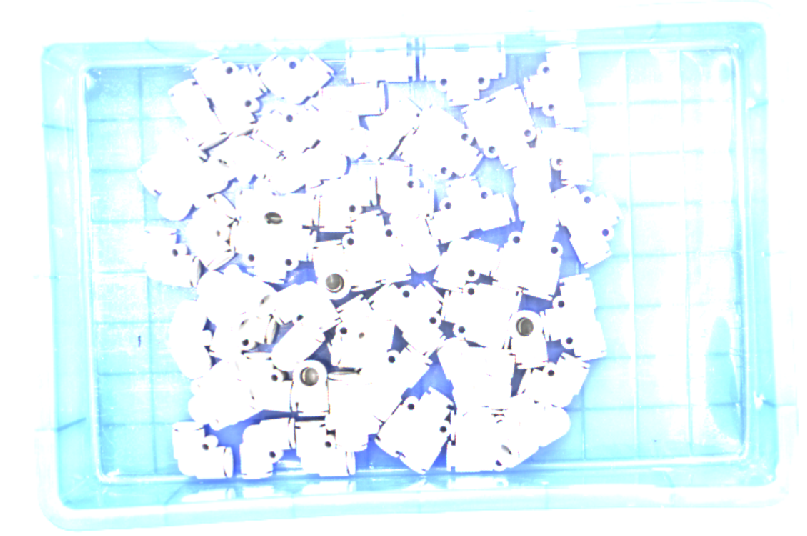
Image 2D : l’image 2D n’est ni trop sombre ni trop claire ; les caractéristiques de surface de l’objet cible sont clairement visibles.
Trop sombre Bonne Trop claire 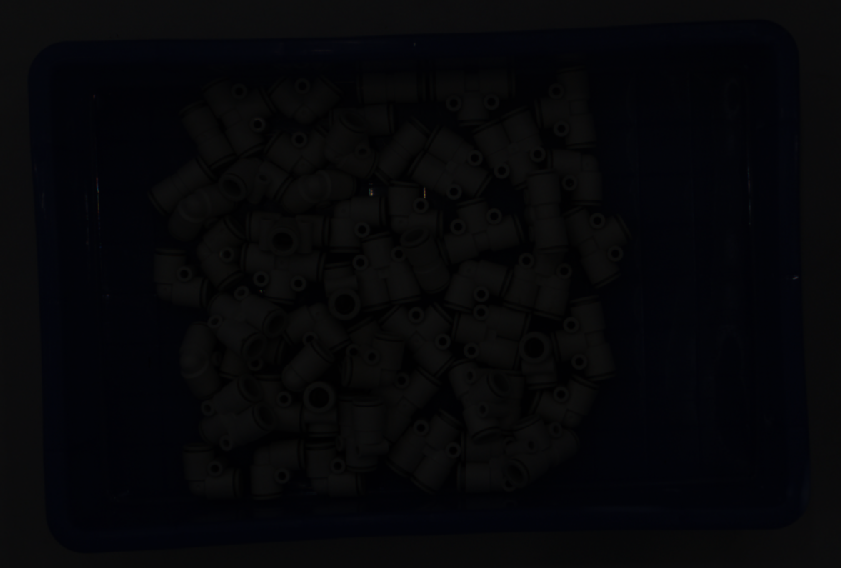

-
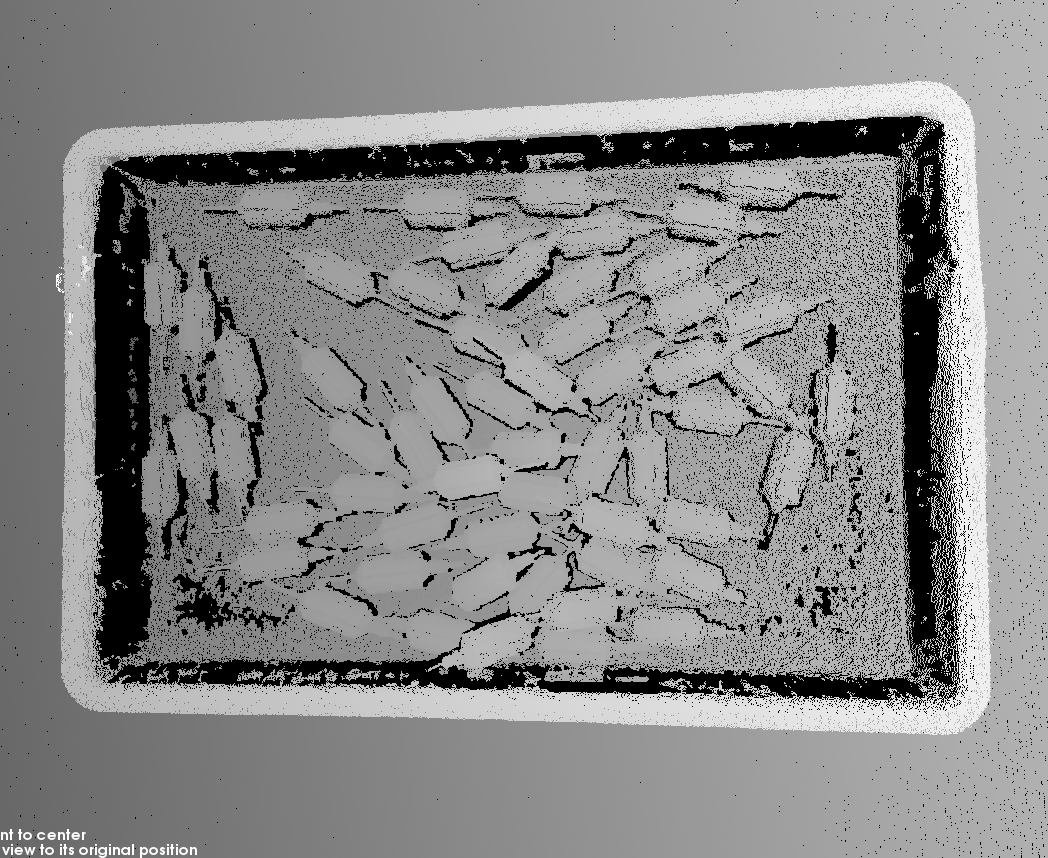
Carte de profondeur et nuage de points : dans la carte de profondeur et le nuage de points, les données correspondant à l’objet cible doivent être complètes. Dans l’exemple suivant, l’objet cible est les rotors.
Nuage de points de l’objet cible incomplet Nuage de points de l’objet cible complet 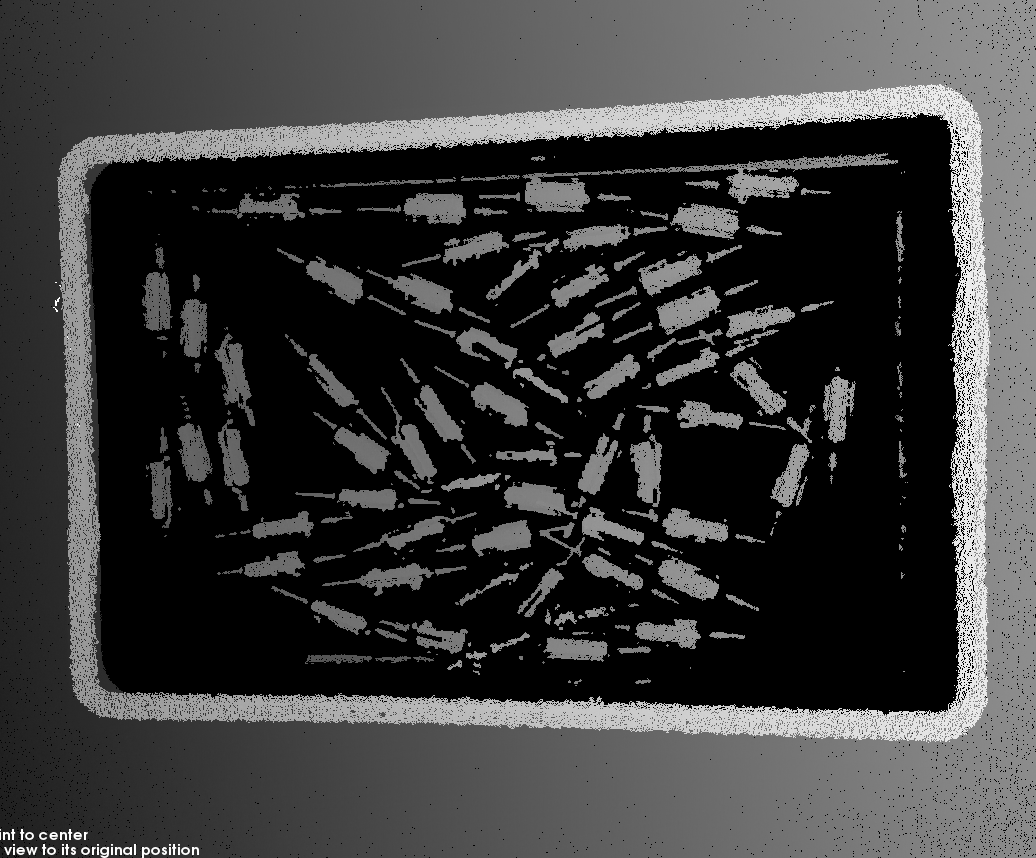
10.2. Améliorer la qualité de l’image 2D
-
Définissez le paramètre Mode d’exposition dans la catégorie Paramètres 2D sur Temporisé, puis ajustez le paramètre Temps d’exposition.
-
Si l’image 2D est trop sombre, augmentez le Temps d’exposition.
-
Si l’image 2D est trop claire, diminuez le Temps d’exposition.
Les séries DEEP-GL et LSR fournissent deux types d’images 2D correspondant à différents paramètres. Pour des informations détaillées, veuillez consulter Paramètres de la série DEEP-GL et Paramètres de la série LSR.
-
-
Capturez à nouveau des images et vérifiez la qualité de l’image 2D.
10.3. Améliorer la qualité de la carte de profondeur et du nuage de points
-
Ajustez le paramètre Temps d’exposition dans la catégorie Paramètres 3D.
-
Si l’objet est de couleur sombre ou peu réfléchissant, augmentez le Temps d’exposition.
-
Si l’objet est de couleur claire ou réfléchissant, diminuez le Temps d’exposition.
-
-
Capturez à nouveau des images et vérifiez la qualité de la carte de profondeur et du nuage de points.
| Pour plus d’explications sur les paramètres, veuillez consulter Guide de référence des paramètres. |
11. Utiliser les données
L’image 2D, la carte de profondeur et le nuage de points obtenus via Mech-Eye Viewer peuvent être enregistrés localement ou envoyés vers Mech-Vision ou des logiciels de vision industrielle tiers pour un traitement et des calculs ultérieurs.
-
Enregistrer les données : cliquez sur
 dans la zone d’acquisition de données, définissez le chemin de destination, cochez les types de données à enregistrer, puis cliquez sur Enregistrer.
dans la zone d’acquisition de données, définissez le chemin de destination, cochez les types de données à enregistrer, puis cliquez sur Enregistrer. -
Utiliser les données dans Mech-Vision : veuillez consulter Tutoriel du système de vision et apprendre à construire l’ensemble du système de vision incluant Mech-Vision.
-
Utiliser les données dans un logiciel de vision industrielle tiers : les données obtenues par la caméra peuvent être transmises à des logiciels tiers via Mech-Eye API ou le Interface GenICam.