Outil des paramètres intrinsèques
Cet outil permet de vérifier si les paramètres intrinsèques de Caméra sont précis et de corriger les paramètres intrinsèques. Les coordonnées des points ne sont exactes que si les paramètres intrinsèques sont précis.
Cliquez sur Outils dans la barre de menu et sélectionnez Outil des paramètres intrinsèques pour ouvrir la fenêtre Outil des paramètres intrinsèques. Vous pouvez ensuite effectuer les opérations de vérification et de correction des paramètres intrinsèques.
Vérifier les paramètres intrinsèques
| Avant de vérifier les paramètres intrinsèques, utilisez Outil de préchauffage pour préchauffer l’appareil. Ensuite, reportez-vous à Sélection de la mire de calibration et sélectionnez la mire de calibration appropriée selon le modèle Caméra et la distance de travail réelle. |
Procédure
Pour utiliser Outil des paramètres intrinsèques afin de vérifier les paramètres intrinsèques de Caméra, suivez ces étapes.
-
Dans 1. Placer la mire de calibration et vérifier la qualité de l’image, vérifiez si l’image 2D et la carte de profondeur répondent aux exigences d’image.
-
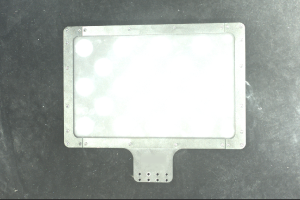
Placez la mire de calibration dans le champ de vision (FOV) de la caméra et assurez-vous qu’elle se trouve à la distance de travail recommandée de la caméra et qu’elle est perpendiculaire à l’axe central de la caméra :

-
Cliquez sur le bouton Acquérir des images pour acquérir l’image 2D et la carte de profondeur de la mire de calibration. Assurez-vous que l’image 2D et la carte de profondeur obtenues satisfont aux exigences suivantes :
-
Les cercles sur la mire de calibration sont entièrement capturés.
-
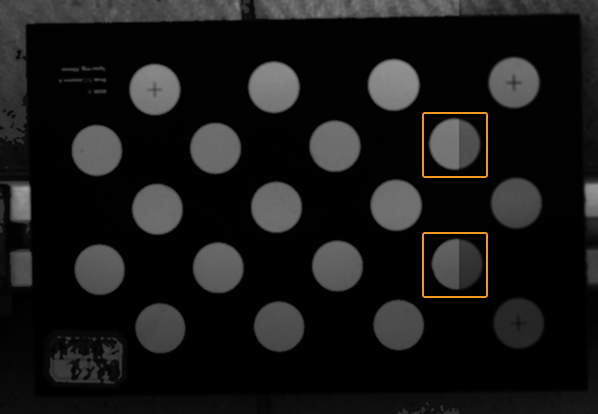
La mire de calibration entière dans l’image 2D doit avoir une luminosité équilibrée, ni trop sombre, ni trop lumineuse, ni inégale. Les cercles de calibration doivent être nets.
-
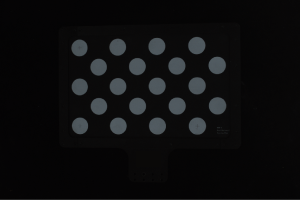
Les cercles de calibration dans la carte de profondeur doivent être intacts.
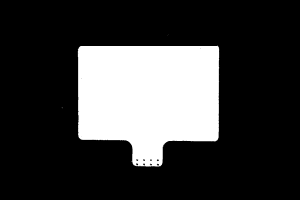
Exemples d’images 2D de la mire de calibration :
Image trop sombre, les cercles sur la mire de calibration sont difficiles à discerner. Luminosité de l’image inégale, les cercles sur la mire de calibration sont difficiles à discerner. Les cercles sur la mire de calibration sont complets et les contours des cercles sont clairement visibles. Image trop lumineuse, les cercles sur la mire de calibration sont difficiles à discerner. 
Si l’image 2D acquise ne satisfait pas aux exigences d’image, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres.
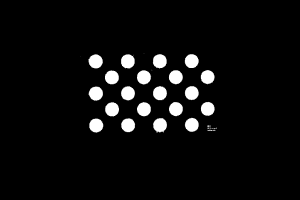
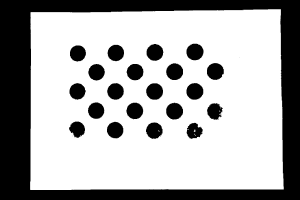
Exemples de cartes de profondeur de la mire de calibration :
Temps d’exposition trop court, les cercles sur la mire de calibration sont incomplets. Les cercles sur la mire de calibration / la mire de calibration entière sont complets. Temps d’exposition trop long, certains ou tous les cercles sur la mire de calibration sont perdus. 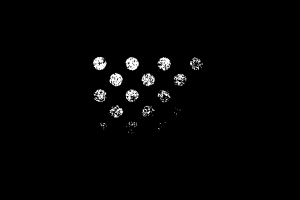
Si la carte de profondeur acquise ne satisfait pas aux exigences d’image, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres 3D.
Pour plus d’informations sur l’ajustement des paramètres, voir Guide de référence des paramètres.
-
-
-
Dans 2. Sélectionner le modèle de la mire de calibration placée, définissez les spécifications de la mire de calibration :
-
Pour une mire de calibration standard, sélectionnez Standard pour Catégorie de mire de calibration, et choisissez le modèle de mire de calibration selon l’étiquette sur la mire.
-
Pour une mire de calibration personnalisée, sélectionnez Personnalisée pour Catégorie de mire de calibration, choisissez le Type de mire de calibration approprié comme illustré, et définissez le nombre de Lignes, de Colonnes et l'Espacement.
-
-
Dans 3. Vérifier et traiter les paramètres intrinsèques, cliquez sur Vérifier les paramètres intrinsèques pour commencer la vérification des paramètres intrinsèques de Caméra. Une fenêtre des résultats de la vérification s’affichera.
-
Si un message d’erreur s’affiche, veuillez dépanner le problème selon la section suivante.
Dépanner les problèmes courants
Les problèmes suivants peuvent survenir lors de la vérification des paramètres intrinsèques.
Résultat de la vérification des paramètres intrinsèques trop élevé
Symptôme:
Les résultats de la vérification des paramètres intrinsèques s’affichent en rouge, indiquant que les résultats de vérification des paramètres intrinsèques de Caméra sont trop élevés.
Solutions:
Essayez les solutions suivantes :
-
Vérifiez si le modèle ou la catégorie de la mire de calibration est correct.
-
S’il est incorrect, sélectionnez le modèle ou la catégorie corrects. Ensuite, cliquez sur le bouton Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
-
S’il est correct, passez à l’étape suivante.
-
-
Vérifiez si l’image 2D et la carte de profondeur satisfont aux exigences d’image. Veuillez vous référer aux exigences d’image.
-
Si l’image 2D ne satisfait pas aux exigences, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres. Si la carte de profondeur ne satisfait pas aux exigences, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres 3D. Ensuite, cliquez sur le bouton Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
-
Si les images satisfont aux exigences, passez à l’étape suivante.
-
-
Vérifiez si Caméra présente un dysfonctionnement ou a subi des dommages dus à des collisions avec d’autres dispositifs, et contactez le support technique.
Cercles sur la mire de calibration non détectés
Symptôme:
La fenêtre des résultats de vérification des paramètres intrinsèques affiche le message : Cercles sur la mire de calibration non détectés.
Solutions:
Essayez les solutions suivantes :
-
Vérifiez si le modèle ou la catégorie de la mire de calibration est correct.
-
S’il est incorrect, sélectionnez le modèle ou la catégorie corrects. Ensuite, cliquez sur le bouton Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
-
S’il est correct, passez à l’étape suivante.
-
-
Vérifiez si l’image 2D et la carte de profondeur satisfont aux exigences d’image. Veuillez vous référer aux exigences d’image.
-
Si l’image 2D ne satisfait pas aux exigences, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres. Ensuite, cliquez sur le bouton Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
-
Si les images satisfont aux exigences, passez à l’étape suivante.
-
-
Ajustez les paramètres de détection, tels que tracer un cercle d’aide ou ajuster les paramètres de détection des caractéristiques (avancé). Ensuite, cliquez sur le bouton Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
-
Si la vérification a réussi, le dépannage est terminé.
-
Si la fenêtre des résultats de vérification des paramètres intrinsèques affiche toujours Cercles sur la mire de calibration non détectés, veuillez contacter le support technique.
-
Tracer un cercle d’aide
Cette fonction peut vous aider à résoudre le problème de cercles sur la mire de calibration non détectés.
Suivez les étapes suivantes pour utiliser la fonction Tracer un cercle d’aide :
-
Dans 3. Vérifier et traiter les paramètres intrinsèques, cliquez sur le bouton Tracer un cercle d’aide.
-
Repérez un cercle complet sur la mire de calibration dans l’image 2D.
-
Appuyez sur Ctrl et cliquez avec le bouton gauche de la souris pour sélectionner le centre du cercle.
-
Déplacez le curseur sur un point quelconque de la circonférence, appuyez sur la touche Ctrl, et cliquez avec le bouton gauche de la souris pour définir le rayon du cercle et terminer le tracé.
-
-
Dans 3. Vérifier et traiter les paramètres intrinsèques, cliquez sur Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
|
Ajuster les paramètres de détection des caractéristiques (avancé)
Cette fonction peut vous aider à résoudre le problème de cercles sur la mire de calibration non détectés.
Suivez les étapes suivantes pour utiliser la fonction Ajuster les paramètres de détection des caractéristiques (avancé) :
-
Dans 3. Vérifier et traiter les paramètres intrinsèques, cliquez sur Ajuster les paramètres de détection des caractéristiques (avancé).
-
Ajustez les paramètres de détection des caractéristiques affichés selon la situation réelle.
-
Si tous les cercles sur la mire de calibration ne peuvent pas être capturés, cochez Autoriser l’absence de certains cercles, et ajustez les nouveaux paramètres de détection des caractéristiques affichés.
-
Dans 3. Vérifier et traiter les paramètres intrinsèques, cliquez sur Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
Points caractéristiques valides introuvables dans la carte de profondeur
Symptôme:
La fenêtre des résultats de vérification des paramètres intrinsèques affiche le message : Points caractéristiques valides introuvables dans la carte de profondeur.
Solutions:
Vérifiez si la carte de profondeur satisfait aux exigences. Veuillez vous référer aux exigences d’image.
-
Si la carte de profondeur acquise ne satisfait pas aux exigences d’image, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres 3D. Ensuite, cliquez sur le bouton Vérifier les paramètres intrinsèques pour vérifier à nouveau les paramètres intrinsèques de Caméra.
-
Si la carte de profondeur satisfait aux exigences, veuillez contacter le support technique.
Exposition inadéquate de l’image 2D
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche que la luminosité de l’image 2D est trop lumineuse, trop sombre ou inégale, ce qui ne répond pas aux exigences d’image.
| Pour des résultats de vérification plus précis, il est recommandé d’ajuster les paramètres selon les solutions suivantes. |
Solutions:
Essayez les solutions suivantes :
-
Si l’image 2D est trop lumineuse ou trop sombre, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres et assurer la qualité de l’image 2D.
-
Si la luminosité de l’image 2D est inégale, reportez-vous à Luminosité non uniforme dans l’image 2D et vérifiez et ajustez les paramètres concernés afin d’obtenir une luminosité uniforme dans chaque cercle sur la mire de calibration.
Cercles sur la mire de calibration trop petits
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche que Les cercles sur la mire de calibration occupent trop peu du champ de vision de la caméra.
| Pour des résultats de vérification plus précis, il est recommandé d’ajuster les paramètres selon les solutions suivantes. |
Solutions:
-
Si la résolution actuelle est trop faible, il est recommandé d’augmenter la résolution de l’image en se référant à Modifier la résolution de l’image.
-
Si la mire de calibration actuelle est trop petite, il est recommandé d’utiliser une mire de calibration plus grande.
Corriger les paramètres intrinsèques
Cette fonction peut vous aider à résoudre le problème d’erreurs importantes dans les paramètres intrinsèques. Il est recommandé d’utiliser la fonctionnalité de correction des paramètres intrinsèques dans les scénarios suivants :
-
La valeur de différence scalaire dans les résultats de vérification des paramètres intrinsèques dépasse les valeurs du tableau ci-dessous.
-
Le projet a des exigences de haute précision pour la caméra, et la précision actuelle de la caméra ne répond pas aux besoins réels.
| Modèle | Valeur de différence scalaire |
|---|---|
DEEP-GL |
0,6% |
LSR L-GL, LSR S-GL, Laser L Enhanced |
0,5% |
LSR XL-GL |
0,4% |
PRO M-GL, PRO S-GL, NANO-GL, NANO ULTRA-GL |
0,3% |
|
Si aucune anomalie n’est détectée lors de la vérification des paramètres intrinsèques, vous pouvez cliquer sur le bouton Commencer la correction des paramètres intrinsèques pour corriger les paramètres intrinsèques sur la page Corriger les paramètres intrinsèques.
Placer la mire de calibration
Lors de l’utilisation de la fonction Corriger les paramètres intrinsèques, placez la mire de calibration selon les exigences suivantes :
-
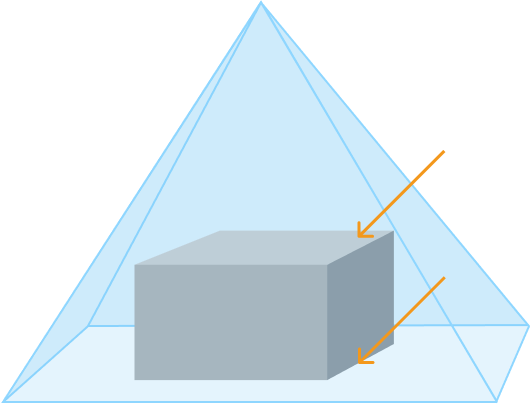
Assurez-vous que le plan de la mire de calibration est aussi perpendiculaire que possible à l’axe central de la caméra :
-
Placez la mire de calibration sur les deux plans suivants : la surface supérieure de l’objet cible (Plan 1) et la surface inférieure (Plan 2). Assurez-vous que la distance entre les deux plans est d’au moins 100 mm.
Par exemple, pour des applications de prélèvement en bac ou de (dé)palettisation, la mire de calibration doit être placée en haut et en bas du bac ou de la charge palettisée.
-
Assurez-vous que la mire de calibration reste dans le champ de vision de la caméra.
Cet outil fournit une assistance pour garantir que la mire de calibration reste dans le champ de vision de la caméra. Suivez ces étapes pour utiliser l’outil :
-
Cliquez sur le bouton Démarrer l’acquisition des images et déplacez la mire de calibration vers différentes positions sur le plan actuel ; l’image 2D et la carte de profondeur de la mire de calibration seront actualisées à une fréquence fixe (environ une fois toutes les 5 secondes).
-
Si l’image 2D et la carte de profondeur sont toutes deux complètes, cela indique que la position est dans le champ de vision de la caméra. Si l’image 2D ou la carte de profondeur est manquante, cela indique que la position peut être en dehors du champ de vision de la caméra.
-
Après avoir confirmé le champ de vision de la caméra sur le plan actuel, cliquez sur le bouton Arrêter l’acquisition des images. Ensuite, reportez-vous à la section suivante et ajoutez les données du plan actuel.
-
Après avoir ajouté les données du plan actuel, suivez ce processus et continuez à ajouter les données de l’autre plan.
-
Le bouton de démarrage/arrêt de l’acquisition des images et les autres boutons de cette page ne peuvent pas être utilisés simultanément.
-
Acquérir et valider les données
La mire de calibration doit être déplacée sur deux plans (Plan 1 et Plan 2) et le bouton Acquérir des données doit être cliqué pour acquérir des données de la mire de calibration à différentes positions. Les données validées sont considérées comme valides. Les critères de validation sont les suivants :
| Élément de validation | Valeur de validation |
|---|---|
Couverture de surface minimale |
25% |
Couverture de longueur minimale |
50% |
Couverture de largeur minimale |
50% |
Nombre minimum de jeux de données |
3 |
Lors de l’acquisition de données sur deux plans, les exigences suivantes doivent être respectées :
-
Acquérez d’abord les données du Plan 1, puis acquérez les données du Plan 2.
-
Lorsque des données du Plan 2 existent, les données du Plan 1 ne peuvent pas être modifiées.
-
Après que les données des deux plans ont été acquises et validées, cliquez sur le bouton Corriger les paramètres intrinsèques pour démarrer la correction des paramètres intrinsèques.
| Vous pouvez utiliser Zones couvertes par les données acquises ci-dessous pour aider à ajuster la position de la mire de calibration, afin de garantir que les données acquises passent la validation. |
Après que les données acquises des Plans 1 et 2 ont passé la validation, vous pouvez cliquer sur le bouton Corriger les paramètres intrinsèques pour démarrer la correction des paramètres intrinsèques. Si un message d’erreur s’affiche lors de l’acquisition et de l’ajout des données, reportez-vous à la section suivante pour le dépannage.
Si la correction des paramètres intrinsèques réussit, cliquez sur le bouton Mettre à jour les paramètres intrinsèques dans la fenêtre contextuelle Résultat de la correction des paramètres intrinsèques pour appliquer les paramètres intrinsèques corrigés et améliorer la précision de la caméra.
Si la correction des paramètres intrinsèques échoue, reportez-vous aux instructions de la fenêtre contextuelle pour le dépannage.
Dépanner les problèmes courants
Les problèmes suivants peuvent survenir lors de la correction des paramètres intrinsèques.
Cercles sur la mire de calibration non reconnus
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche Échec de la reconnaissance des cercles sur la mire de calibration dans l’image 2D.
Solutions:
Essayez les solutions suivantes :
-
Vérifiez si la mire de calibration est dans le champ de vision de toutes les caméras.
-
Si ce n’est pas le cas, ajustez sa position. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si la mire de calibration est dans le champ de vision de toutes les caméras, passez à l’étape suivante.
-
-
Vérifiez si l’image 2D satisfait aux exigences d’image. Veuillez vous référer aux exigences d’image.
-
Si l’image 2D est trop lumineuse ou trop sombre, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres et assurer la qualité de l’image 2D. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si la luminosité de l’image 2D est inégale, reportez-vous à Luminosité non uniforme dans l’image 2D et vérifiez et ajustez les paramètres concernés afin d’obtenir une luminosité uniforme dans chaque cercle sur la mire de calibration. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si l’image 2D satisfait aux exigences, passez à l’étape suivante.
-
-
Si le problème persiste, enregistrez le fichier technique et contactez le support technique.
Tous les cercles sur la mire de calibration ne sont pas reconnus
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche Il est nécessaire de reconnaître N cercles sur la mire de calibration, mais seuls M cercles sont reconnus.
Solutions:
-
Vérifiez si la mire de calibration est dans le champ de vision de la caméra et la plage de projection du projecteur.
-
Si ce n’est pas le cas, ajustez la position de la mire de calibration pour garantir qu’elle se trouve dans le champ de vision de la caméra et la plage de projection du projecteur, et ajustez les paramètres 3D pour assurer une exposition correcte. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si oui, passez à l’étape suivante.
-
-
Si le problème persiste, enregistrez le fichier technique et contactez le support technique.
Données acquises hors du plan actuel
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche Les données acquises ne sont pas sur le plan actuel. Cela indique que la distance entre le plan des données actuelles et la caméra n’est pas dans la plage de distance acceptable entre le plan et la caméra.
Solutions:
-
Ajustez la position de la mire de calibration afin que sa distance par rapport à la caméra soit dans la plage acceptable. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si le problème persiste, enregistrez le fichier technique et contactez le support technique.
Erreur dans les données actuelles trop importante
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche L’erreur dans les données actuelles est trop importante.
Solutions:
Essayez les solutions suivantes :
-
Vérifiez s’il y a plus d’une mire de calibration dans le champ de vision de la caméra.
-
Si oui, retirez les mires de calibration autres que la mire cible. Ensuite, cliquez à nouveau sur Acquérir des données.
-
S’il n’y a que la mire de calibration cible, passez à l’étape suivante.
-
-
Vérifiez si l’image 2D satisfait aux exigences d’image. Veuillez vous référer aux exigences d’image.
-
Si l’image 2D est trop lumineuse ou trop sombre, reportez-vous à Ajuster les paramètres d’exposition 2D et 3D pendant l’étalonnage pour ajuster les paramètres et assurer la qualité de l’image 2D. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si la luminosité de l’image 2D est inégale, reportez-vous à Luminosité non uniforme dans l’image 2D et vérifiez et ajustez les paramètres concernés afin d’obtenir une luminosité uniforme dans chaque cercle sur la mire de calibration. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si l’image 2D satisfait aux exigences, passez à l’étape suivante.
-
-
Vérifiez si la mire de calibration est dans le champ de vision de la caméra et la plage de projection du projecteur.
-
Si ce n’est pas le cas, ajustez la position de la mire de calibration pour garantir qu’elle se trouve dans le champ de vision de la caméra et la plage de projection du projecteur, et ajustez les paramètres 3D pour assurer une exposition correcte. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si oui, passez à l’étape suivante.
-
-
Si le problème persiste, enregistrez le fichier technique et contactez le support technique.
Échec de l’acquisition des données
Symptôme:
La boîte de messages dans la partie inférieure de l’interface du logiciel affiche Échec de l’acquisition des données.
Solutions:
-
Enregistrez le fichier technique.
-
Vérifiez la connexion de la caméra.
-
Si la connexion de la caméra est anormale, reconnectez la caméra. Ensuite, cliquez à nouveau sur Acquérir des données.
-
Si la caméra est connectée, veuillez contacter le support technique.
-