Mécanisme d’imagerie de la caméra à lumière structurée
En tant que caméra 3D à lumière structurée, Caméra industrielle 3D Mech-Eye (« caméra 3D » pour faire court) se compose d’un projecteur et de caméra(s) 2D. Avec l’aide de la lumière structurée projetée par le projecteur, une caméra 3D peut acquérir les données de profondeur et l’image 2D de l’objet cible de la même manière qu’une caméra 2D ordinaire.
L’ensemble du processus de balayage de la caméra 3D peut être divisé en trois phases : acquisition des données, calcul et traitement, et sortie. Ces phases seront présentées dans les sections ci-dessous.
Acquisition des données
La caméra 3D peut acquérir à la fois les données 2D et 3D d’un objet cible.
-
Processus d’acquisition des données 3D :
-
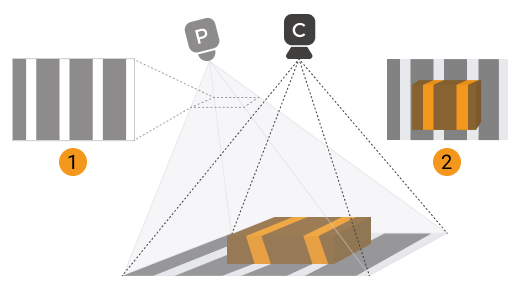
Le projecteur (P sur la figure ci-dessous) projette une lumière à motif de bandes (① sur la figure ci-dessous) sur la surface de l’objet cible. Le motif lumineux est déformé par la forme de l’objet cible.
-
La caméra 2D (C sur la figure ci-dessous) capture une image (② sur la figure ci-dessous) contenant le motif lumineux déformé et l’objet cible.
-
Le projecteur continue à projeter une lumière structurée de différents motifs, et la caméra 2D continue à capturer des images pour chaque motif lumineux.
-
-
Processus d’acquisition des données 2D : Lorsque le projecteur ne projette pas de lumière structurée, l’image capturée par la caméra 2D est l’image 2D de l’objet cible.
Calcul et traitement
La caméra 3D calcule les données de profondeur de la surface de l’objet à partir de la déformation des motifs de bandes. En utilisant ces données de profondeur, la caméra 3D génère ensuite la carte de profondeur et le nuage de points.
Sortie
La caméra 3D transmet les données générées à Mech-Eye SDK ou au client GenICam. Vous pouvez alors voir l’image 2D, la carte de profondeur et le nuage de points des objets.
-
Image 2D : l’image acquise par la caméra 2D lorsque le projecteur ne projette pas de lumière structurée.
-
Carte de profondeur : une image contenant des informations de profondeur.
-
Nuage de points : un ensemble de points de données contenant les coordonnées 3D (XYZ) de la surface de l’objet.