Master-Control Communication Setup (RobotWare 7)
Preparation
Check Controller and Software Compatibility
-
Controller: OmniCore
-
Controller system software version: higher than RobotWare 7.3
-
Control module option: 3114-1 Multitasking
The detailed instructions are as follows.
-
In the Home interface of the teach pendant, select to check the RobotWare version.
-
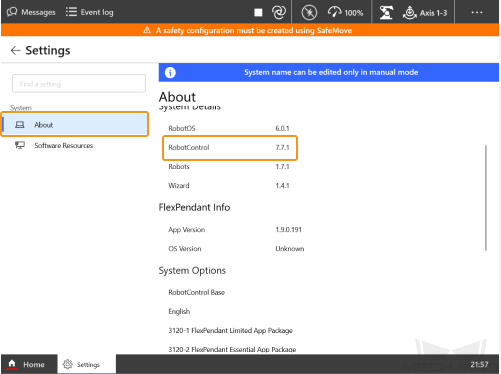
Tap About and you can confirm the RobotWare version, which should be above 7.3, in System Details.
-
Check whether 3114-1 Multitasking is in the System Options.
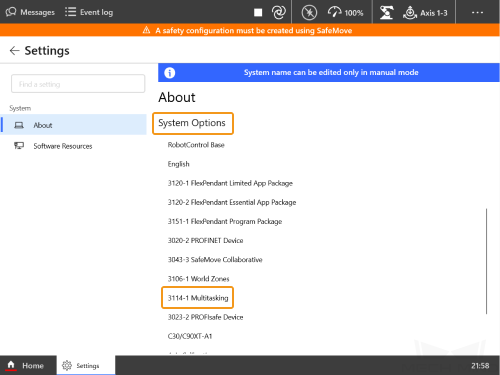
The robot cannot be connected by using master-control if the system version does not meet the requirement.
Set up the Network Connection
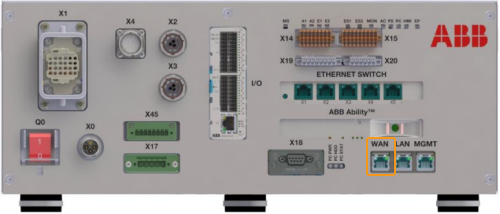
Connect the Hardware
Plug the Ethernet cable of the IPC into the WAN port of the robot controller, as shown below.
Set the IP Address
| The cable must be plugged into the the WAN port. When you set the IP address, distinguish the IP address of the WAN port from that of the LAN port. |
-
Select
 to open Control Panel and then select .
to open Control Panel and then select .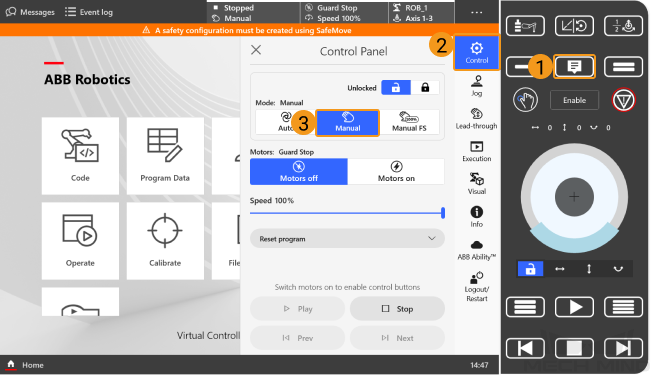
-
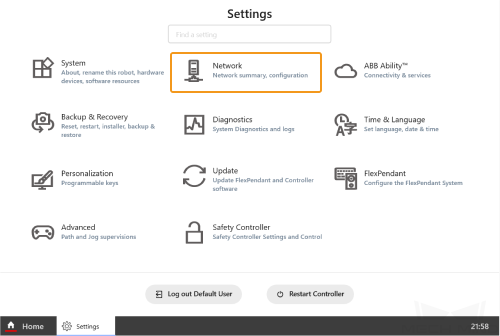
In the Home interface of the teach pendant, select .
-
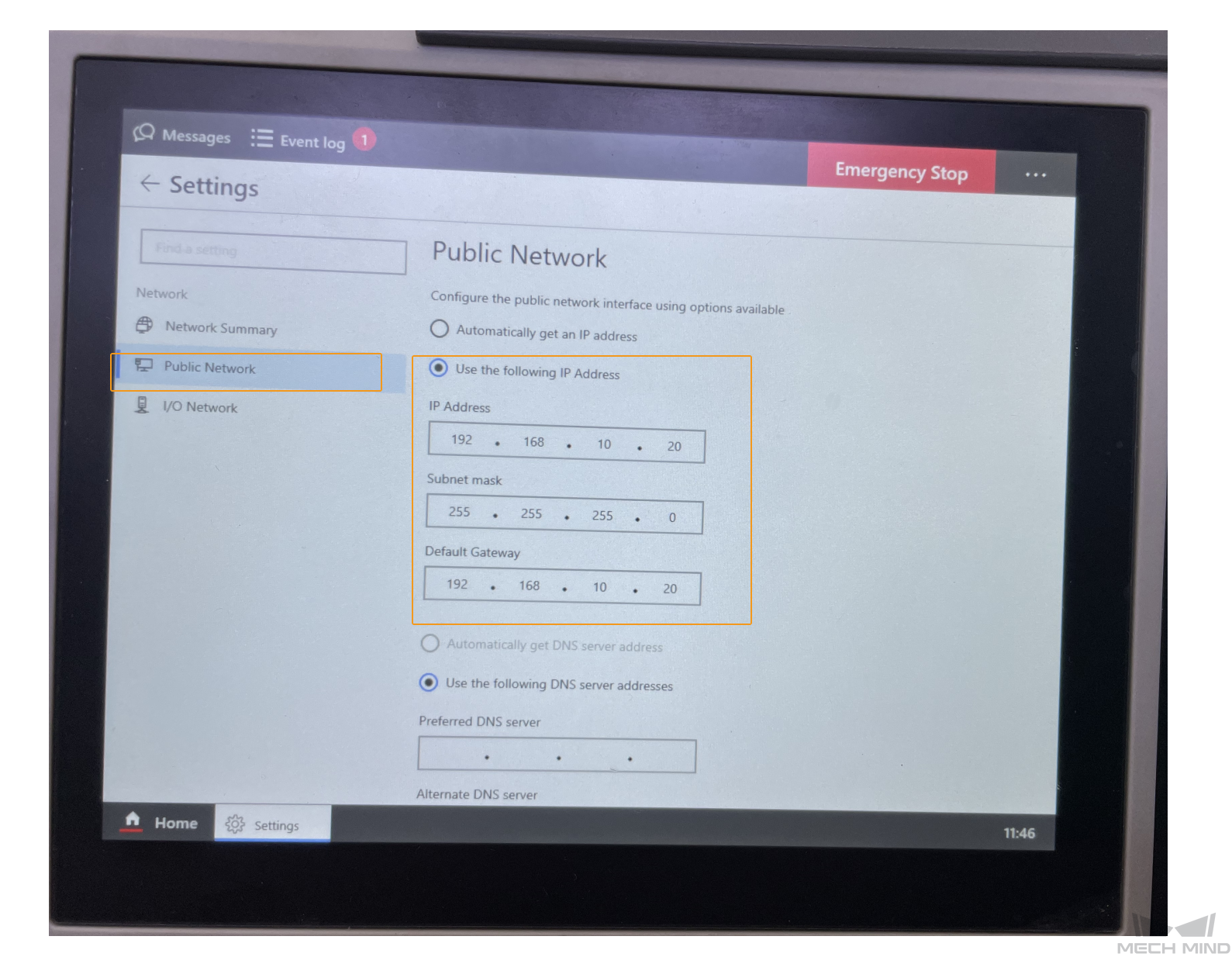
Select Use the following IP address, and enter the IP Address, Subnet mask, and Default Getaway. The IP address of the robot should be in the same subnet as that of the IPC.
Load the Program Files to the Robot (Auto)
After you set parameters in the Robot Program Loader tool, the tool auto-loads files to the ABB robot. Follow the steps below to allow the tool to auto-load files.
| If the auto-load process fails and you cannot resolve the issue, proceed to Load the Program Files to the Robot (Manual). |
-
Select
to open Control Panel and then select .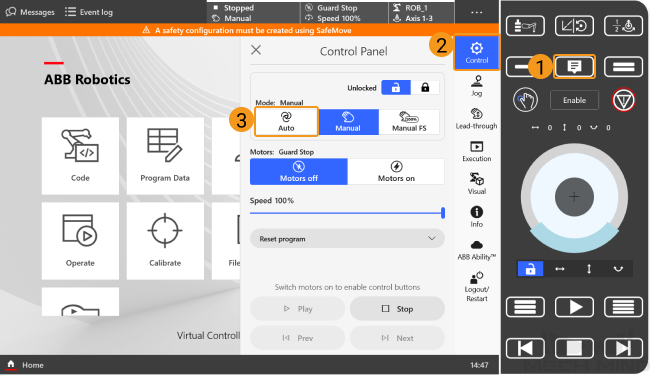
-
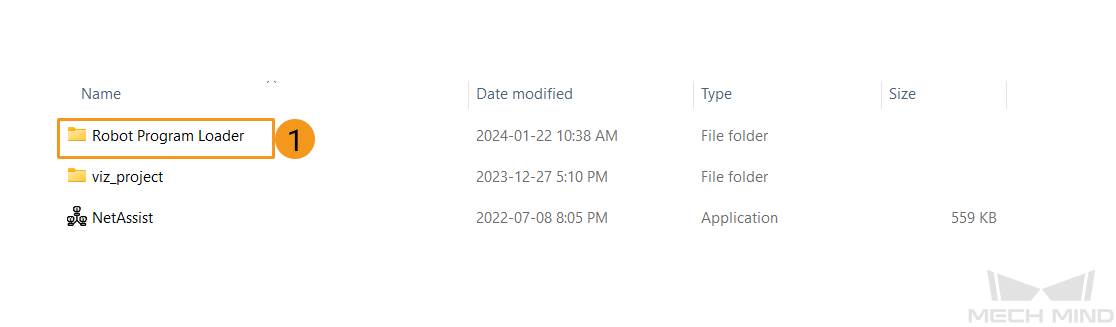
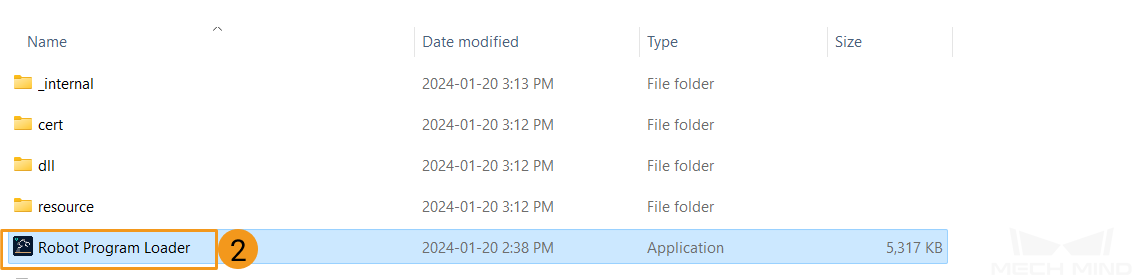
Navigate to the installation directory of Mech-Vision and Mech-Viz, go to the Robot Program Loader folder by using the Mech-Center\tool\Robot Program Loader path, and then double-click the Robot Program Loader program to open the loader. The main interface of the loader appears.
To switch languages in Robot Program Loader, select a different language from the drop-down list in the upper-right corner of the main interface and restart Robot Program Loader for the new language to take effect. -
Select the ABB robot brand, enter the actual robot IP address, and then click Connect.
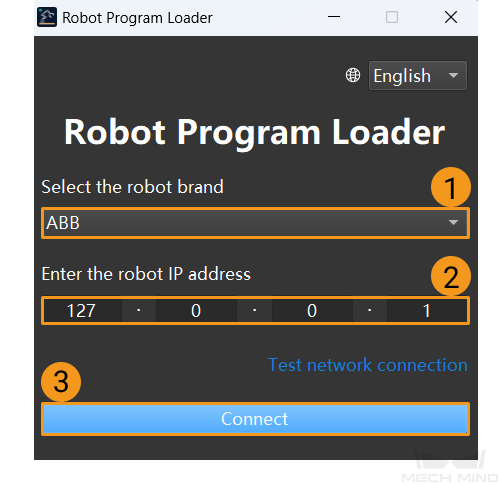
If the connection fails, click Test network connection in the lower-right corner to troubleshoot the issue. -
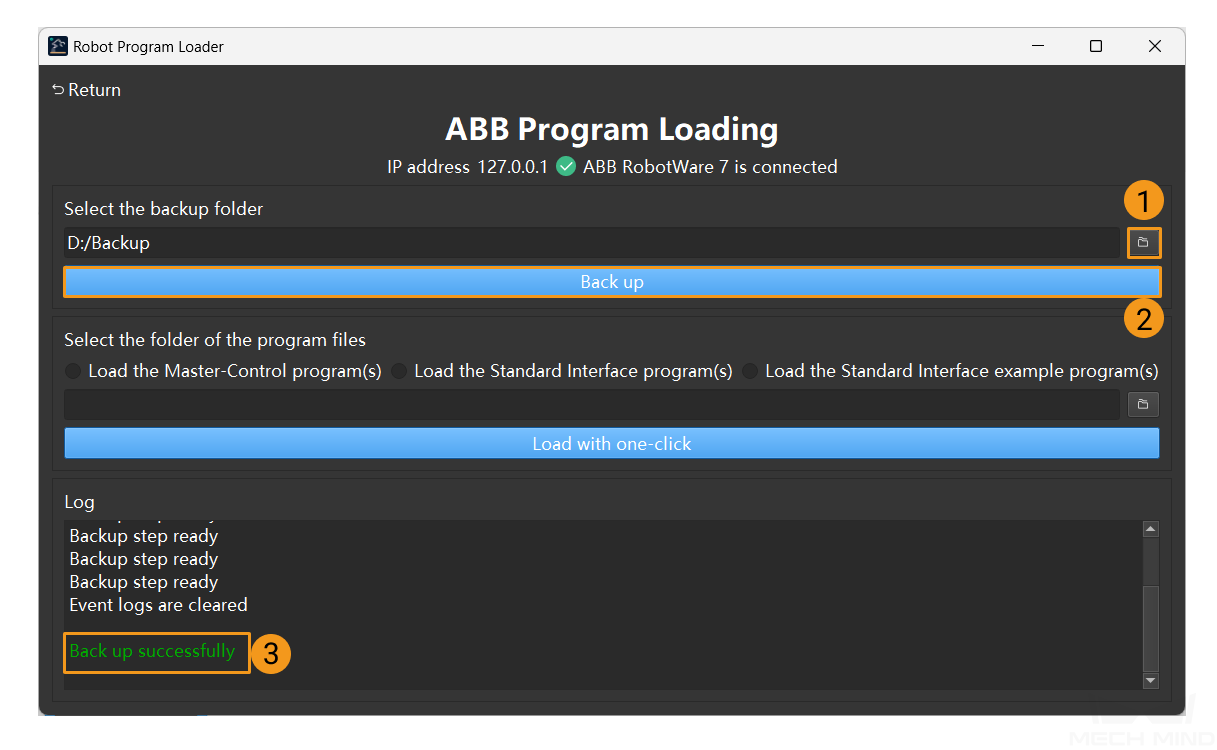
In the ABB Program Loading interface, select a folder to store the backup files and then click Back up. If the files are backed up, a message that indicates the backup is successful is displayed in the Log section.
-
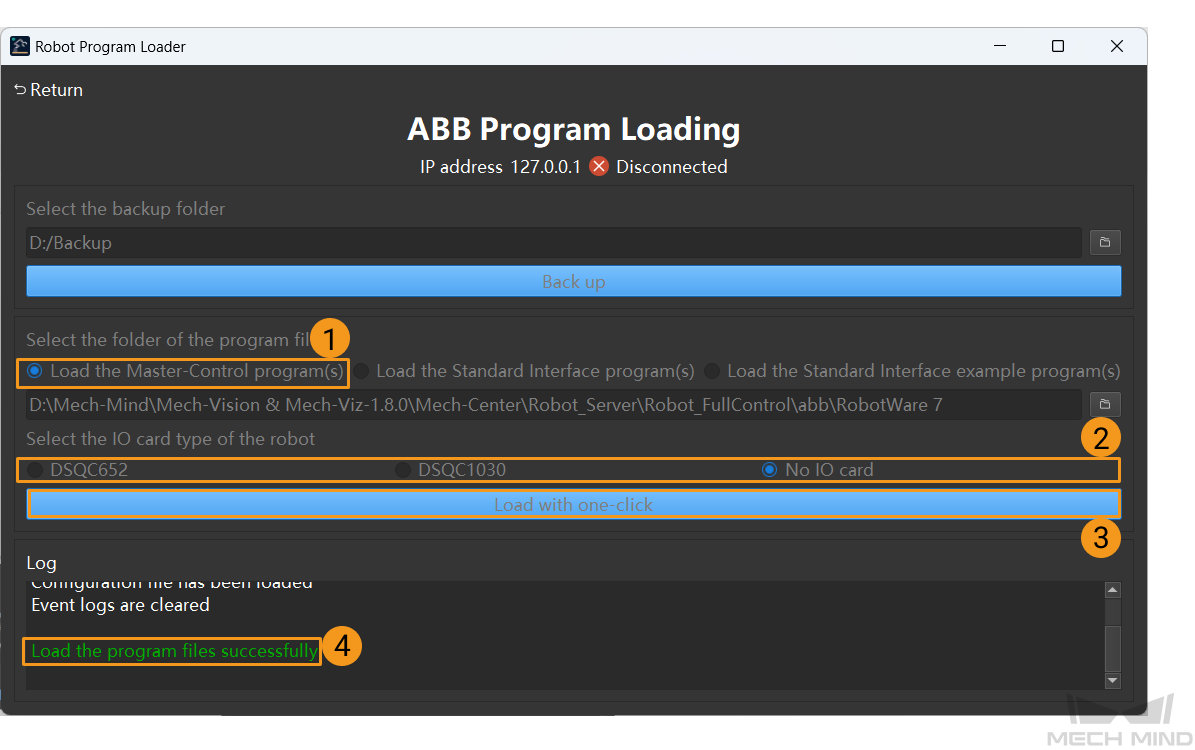
After the backup succeeds, select Load the Master-Control program(s) to confirm the folder that stores the program files and then select the IO card type of the robot. In this example, No IO card is selected. Your card type may be different from the card type that is used in this example. Set the card type based on your actual scenario. After you set the preceding parameters, click Load with one-click. If a message that indicates the program files are successfully loaded appears in the Log section, the files are loaded to the robot.
If the auto-load process succeeds, the controller restarts. After the auto-load process succeeds, proceed to Test Master-Control Communication.
Load the Program Files to the Robot (Manual)
If the auto-load process succeeds, skip this section.
Prepare the Files
Navigate to Mech-Center/Robot_Server/Robot_FullControl/abb/RobotWare 7 from the installation directory of Mech-Vision & Mech-Viz. Copy the folders below and paste it into the USB flash drive.
| Folder | Description |
|---|---|
config_robware7 |
Robot configuration file that defines the signals required by the master-control, the auto-loaded module, and task types |
MM_robware7 |
The robot program module |
Backup
Before operating the robot, please follow the backup instructions below to back up the system so that the robot system can be restored if an incorrect operation occurs.
-
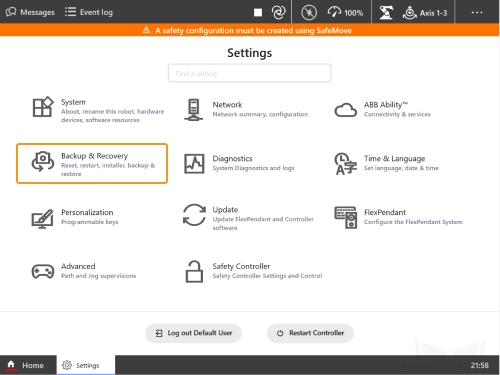
Select in the Home interface.
-
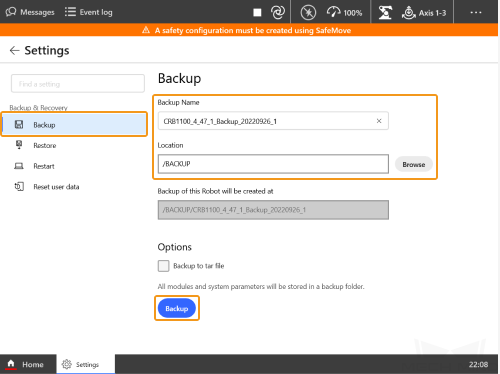
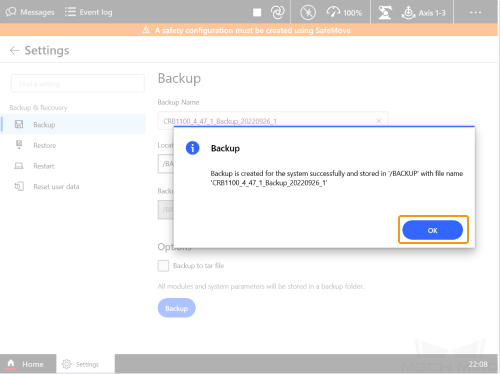
In the Backup window, modify the Backup Name and Location and then tap Backup.
-
Select OK in the pop-up window to complete the backup.
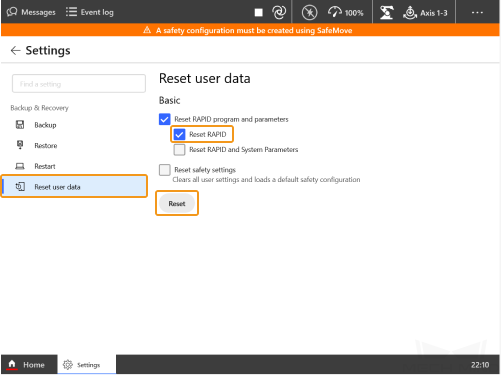
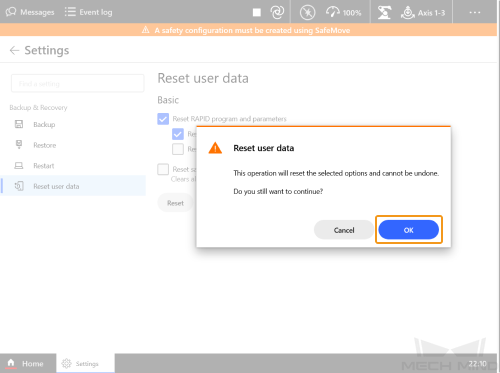
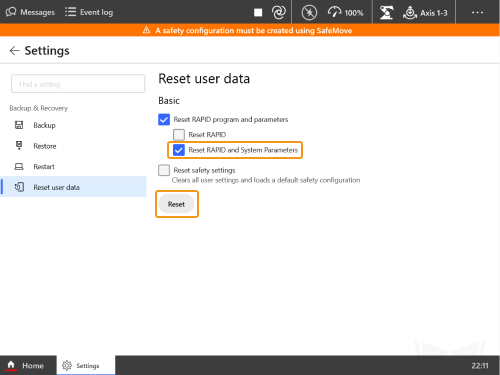
Resetting
|
Two types of resetting exist: resetting RAPID and resetting the system.
|
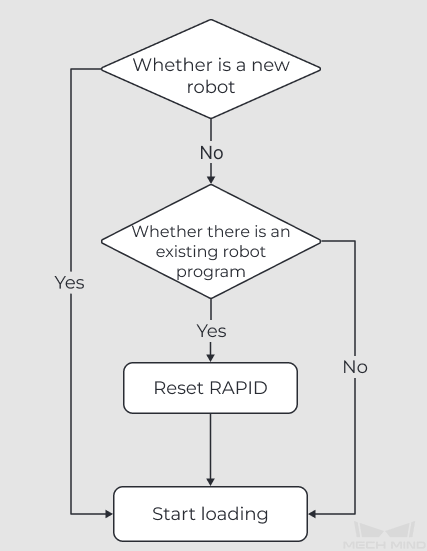
Load the Files to the Robot
Before starting, ensure that the robot system does not have programs created with Wizard. Wizard is a graphical programming tool, which enables users to create programs by dragging and dropping graphic blocks. If a Wizard program exists in the robot system, you should reset RAPID. Besides, do not program with Wizard after loading the program files.
-
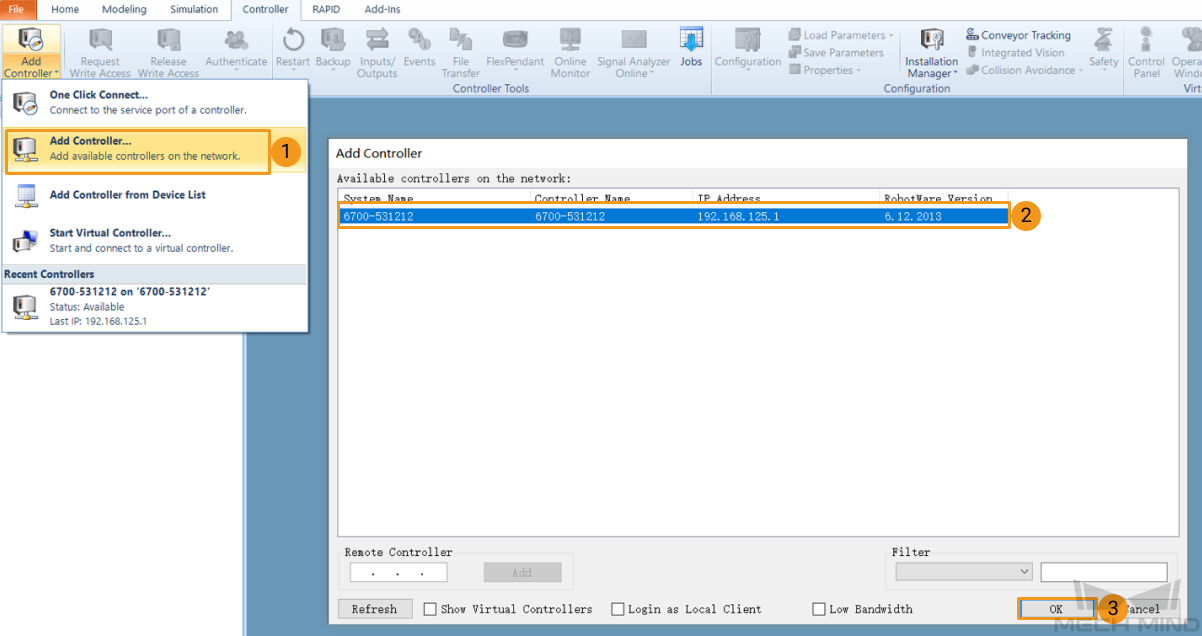
The Ethernet cable is connected to the WAN port of the controller. To add the controller, you can open RobotStudio, click Add Controller…, and then select the controller and click OK. After the controller is added, the controller management port will be connected automatically.
-
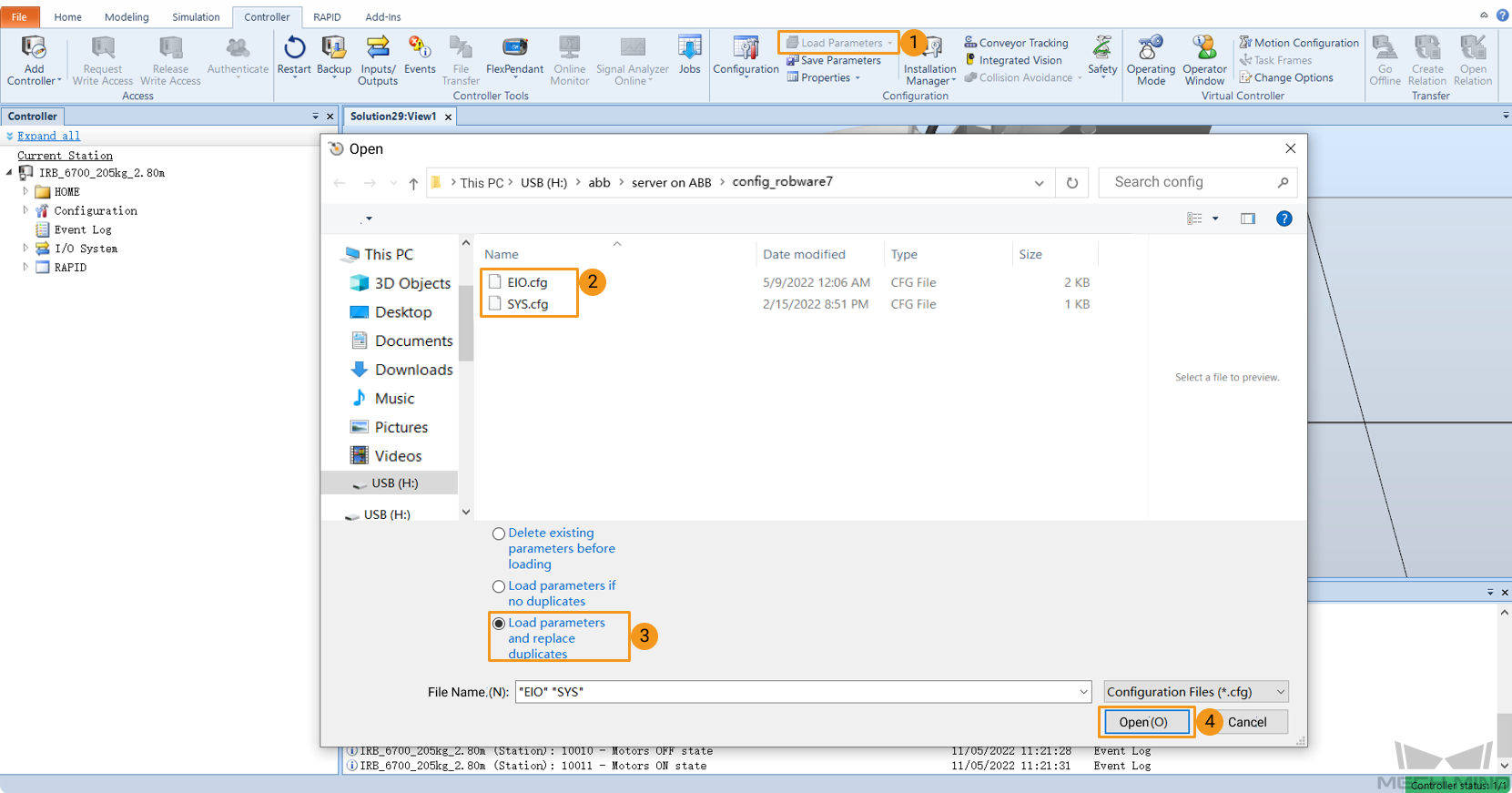
Import the two configuration files in the config_robware7 folder as shown below.
If a DSQC 1030 I/O unit is used, please select DSQC1030.cfg and SYS.cfg.
-
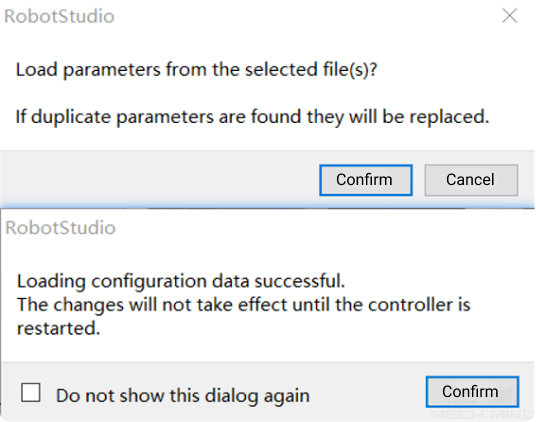
Select Confirm in the pop-up windows.
-
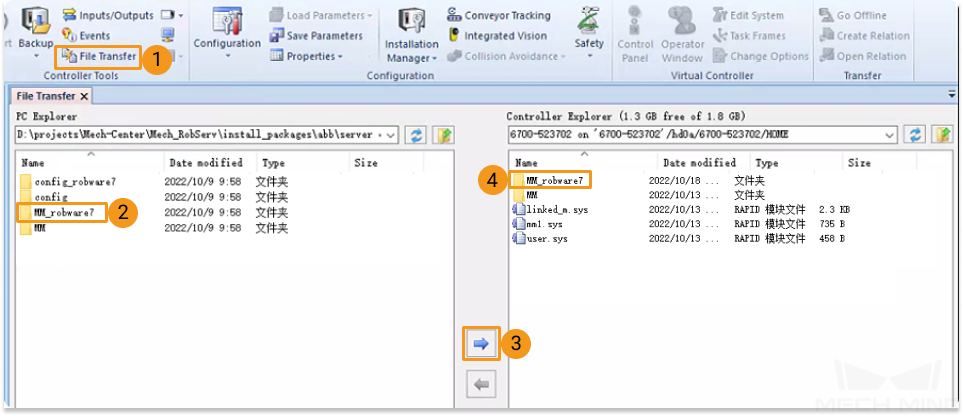
Follow the steps as shown in the figure below to copy the entire MM_robware7 folder and paste it to the HOME directory of the robot system.
-
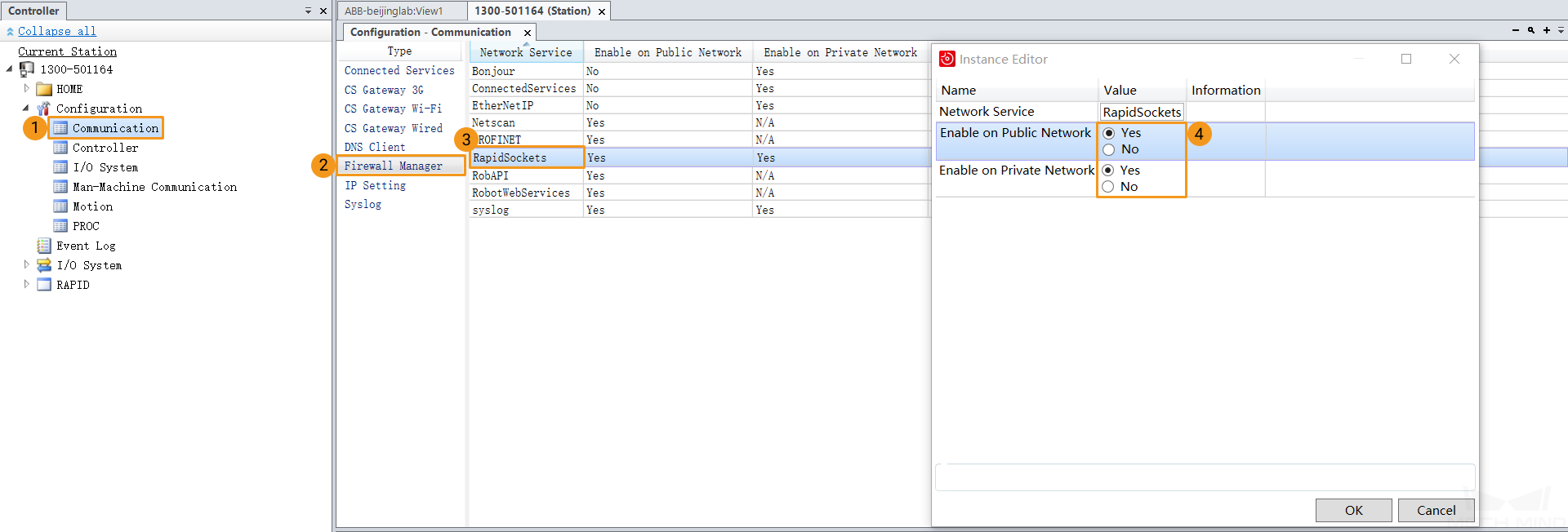
Follow the steps as shown in the figure below to enable the RapidSockets network service.
-
Modify the safe zone threshold (in mm) in the safe_area.mod program based on the actual on-site work space of the robot.
-
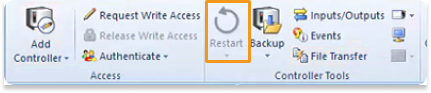
Click Restart to complete loading the program files.
Test Master-Control Communication
Please ensure that:
-
The robot system does not have a Main program. If a Main program already exists in the robot system, modify the name of the program.
-
The StopMove function does not have the Quick property.
Reset the Program Pointer
-
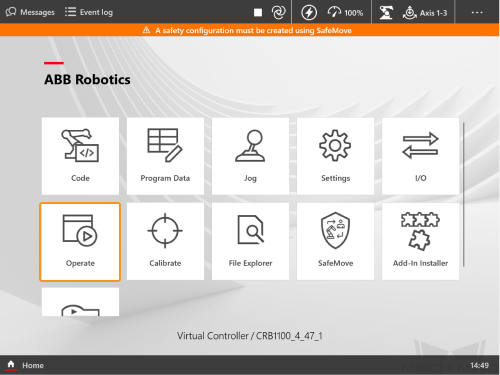
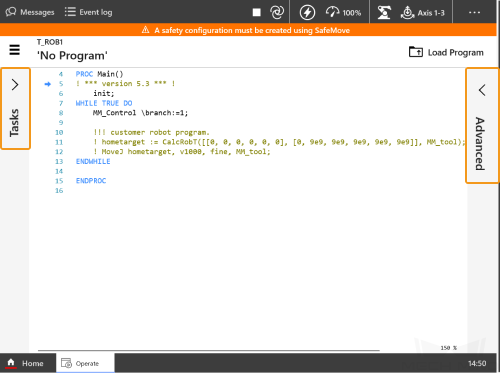
In the Home interface, tap Operate.
-
Tap Tasks on the left and the list of tasks will be expanded. Tap Advanced on the right and the advanced settings will appear.
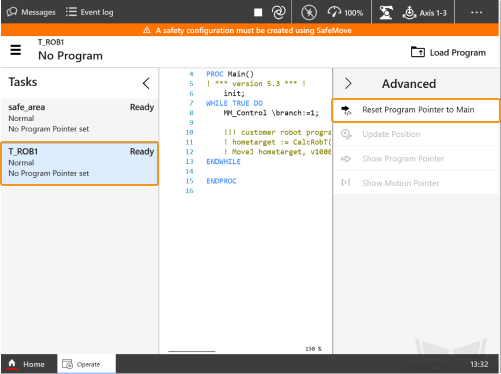
-
In the list of tasks, select T_ROB1, and then select Reset Program Pointer to Main.
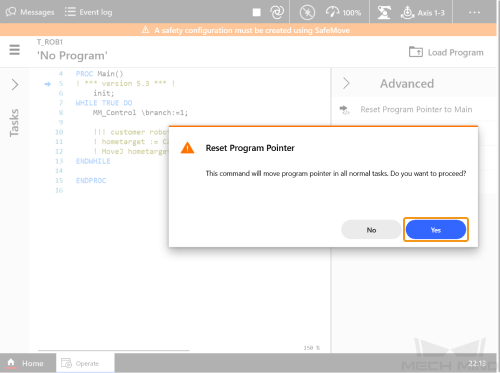
-
Select Yes in the pop-up window.
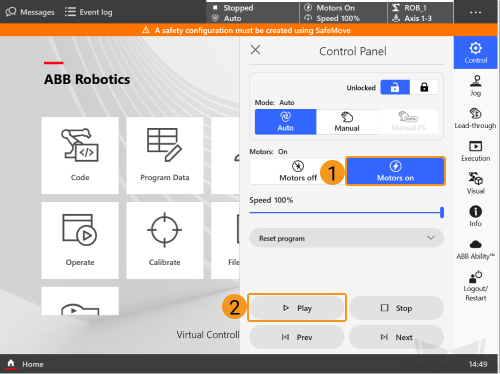
Run the Program
-
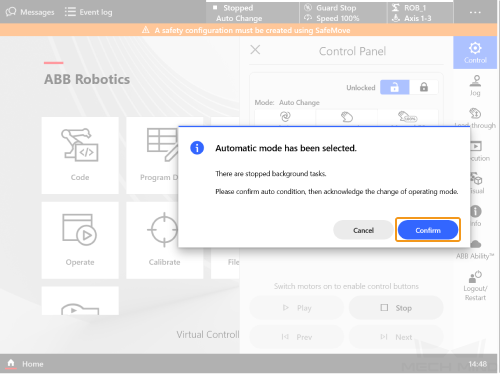
Tap
to open Control Panel and then select .
-
Select Confirm in the pop-up window.
-
Select to run the program.
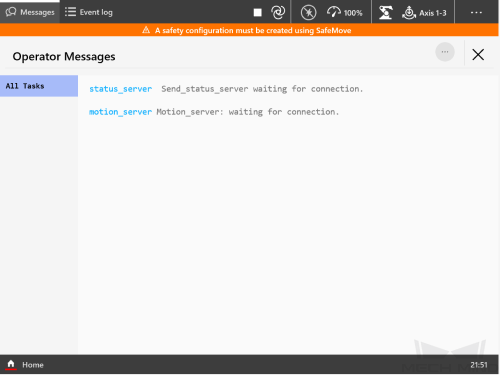
-
Tap Messages in the upper left corner to view the Operator Messages. If messages as shown below appear, the program has been successfully loaded on the robot side.
Create a Mech-Viz Project
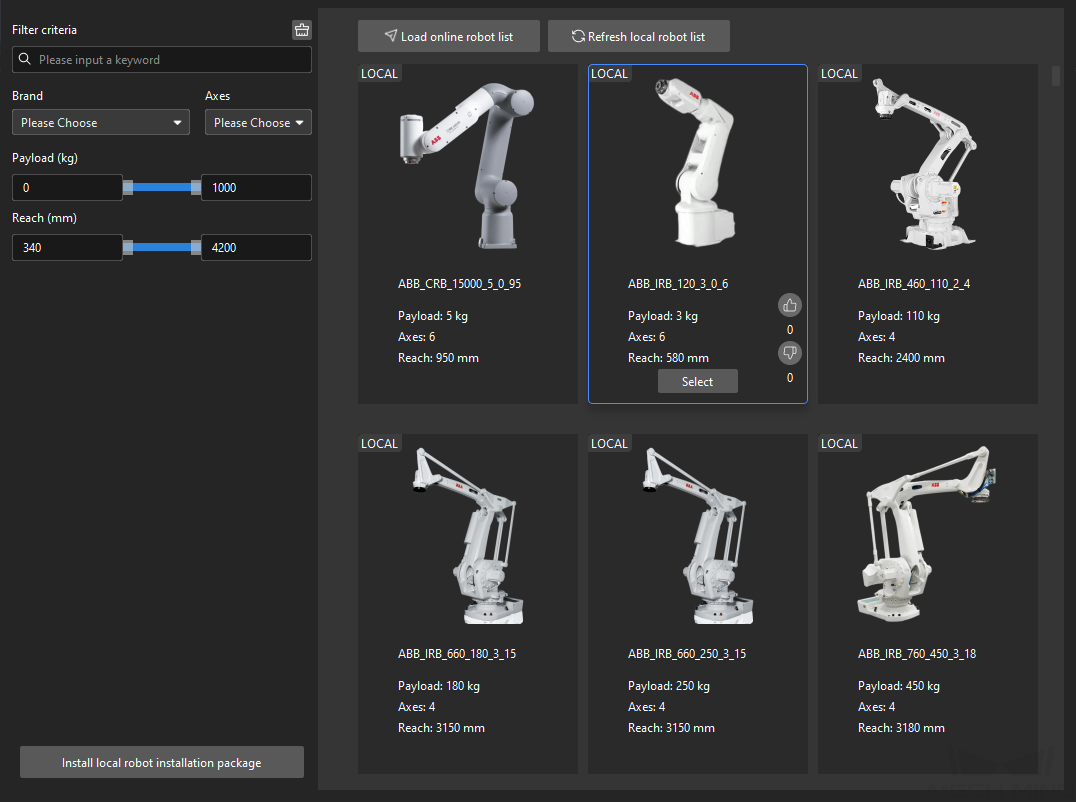
-
Open Mech-Viz, press Ctrl+N on the keyboard to create a new project. Select the robot model corresponding to your real robot brand and model on the interface as shown below.
-
Press Ctrl+S and create or select a folder to save the project.
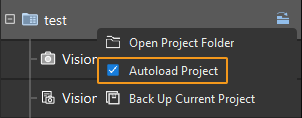
-
Right-click the project name in the left panel in Mech-Viz and select Autoload Project.
Connect to the Robot
-
Click Master-Control Robot on the toolbar of Mech-Viz.
-
Input the IP address of the real robot in Robot IP address (the IP address in the picture is only an example). Click Connect the robot.
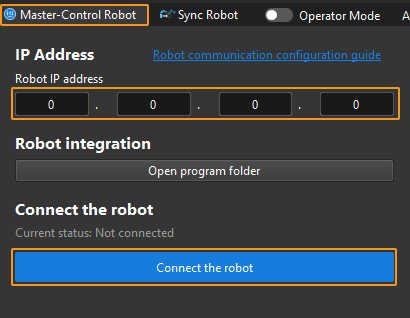
If Mech-Viz successfully connects the real robot, the current status will change to Connected. Meanwhile, the icon in the toolbar will turn from blue to green.
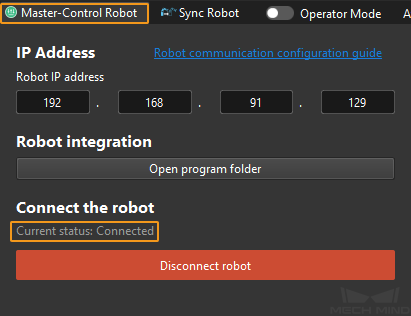
If the connection fails, please double-check the robot IP address.
Move the Robot
-
In the toolbar of Mech-Viz, change the Vel. (velocity) and Acc. (acceleration) parameters to 5%.

-
Click Sync Robot in the toolbar, and you can synchronize the poses of the simulated robot in the 3D simulation space with the poses of the real robot. Then click Sync Robot again to unselect it.

-
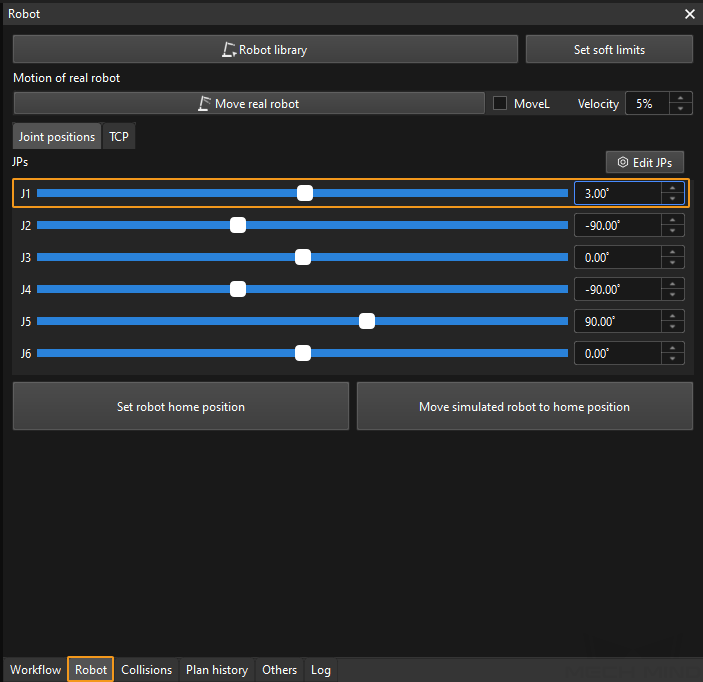
In the Robot tab, slightly adjust the value of J1, for example, from 0˚ to 3˚. This operation will move the simulated robot.
-
Click Move real robot and check if the real robot has moved. If the real robot has reached the joint positions set for the simulated robot, the master-control communication is working.
When moving the robot, please ensure the safety of personnel. In the case of an emergency, press the emergency stop button on the teach pendant! 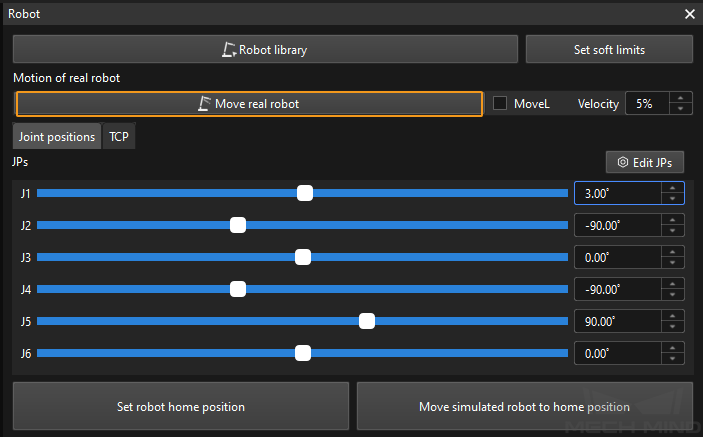
Troubleshooting
If the program has been loaded but the robot cannot be connected successfully, please check whether the following requirements have been met.
-
IPC side:
-
The firewall is turned off.
-
The IPC can ping the robot IP address in the command prompt.
-
Antivirus software does not affect the connection.
-
Two network ports of the IPC belong to different subnets.
-
If the IPC is connected by using a router, other network cables do not affect the connection.
-
-
Robot side:
-
The Ethernet cable is connected to the WAN port of the controller properly.
-
The correct robot IP address is set. Please ensure that the IP address of the WAN port, instead of other ports, is modified.
-
The program is run on the robot side.
-