Master-Control Communication Setup
This guide shows you how to set up Master-Control communication with a YASKAWA robot.
|
The following instructions are based on the YRC1000 controller. Details may differ for other teach pendants of the YASKAWA robot. |
Check Controller and Software Compatibility
-
Confirm that the robot controller model is YRC1000 and the robot system version is YAS2.94.00-00.
-
Requirements: To load the master-control program files, the Robot must have the MotoPlus and Ethernet functions enabled.
Set up the Network Connection
Connect the Hardware
If you are using the YRC1000 controller, plug the Ethernet cable of the IPC into the LAN2 (CN106) port on the CPU board of the robot controller.
|
For the YRC1000 controller:
|
Set the IP Address
-
Press and hold the
MAIN MENUkey and power the robot to enter the maintenance mode.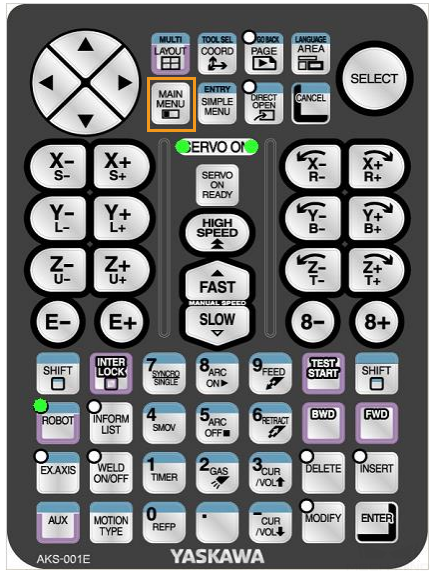
The system enters the normal startup mode if you do not press the MAIN MENUkey. -
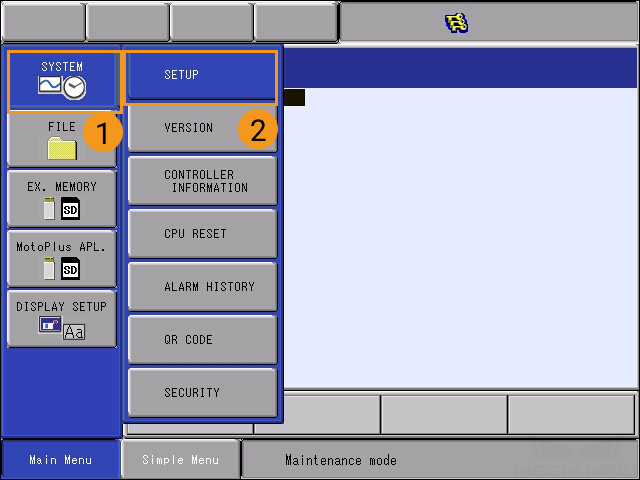
Select .
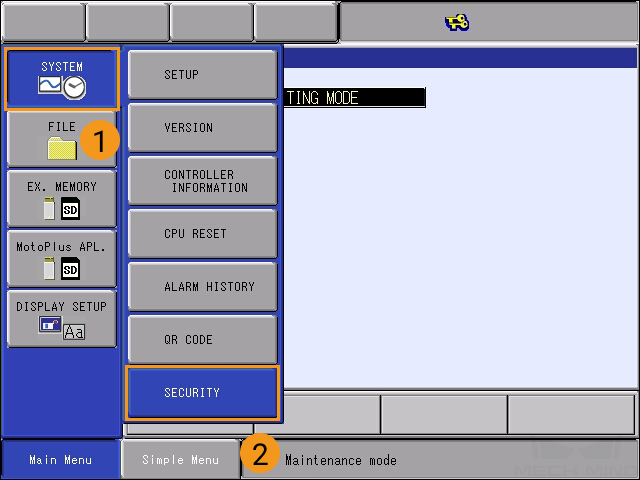

-
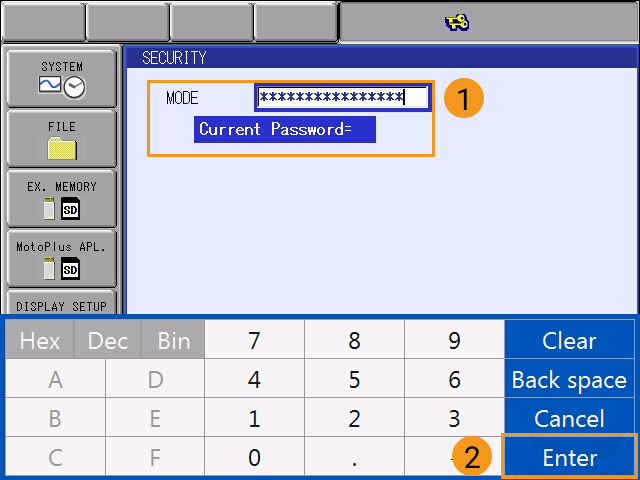
Enter the password (the default password is sixteen 9s), and then select Enter to enter MANAGEMENT MODE.
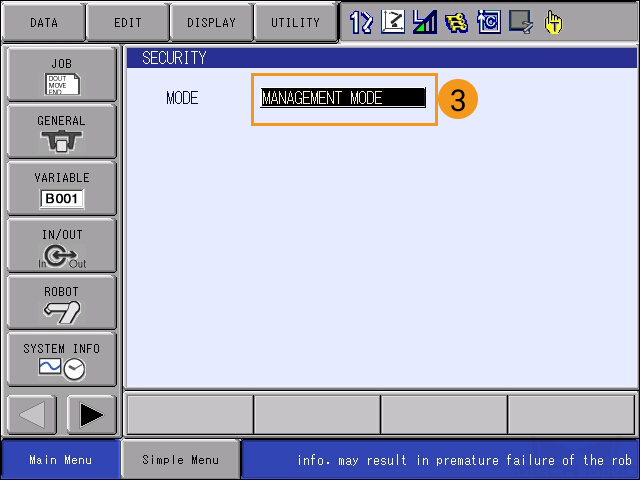
-
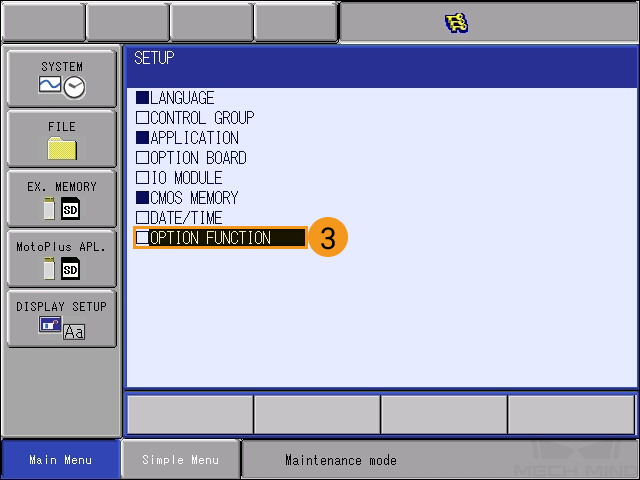
Select . At the OPTION FUNCTION interface, select LAN INTERFACE SETTING.
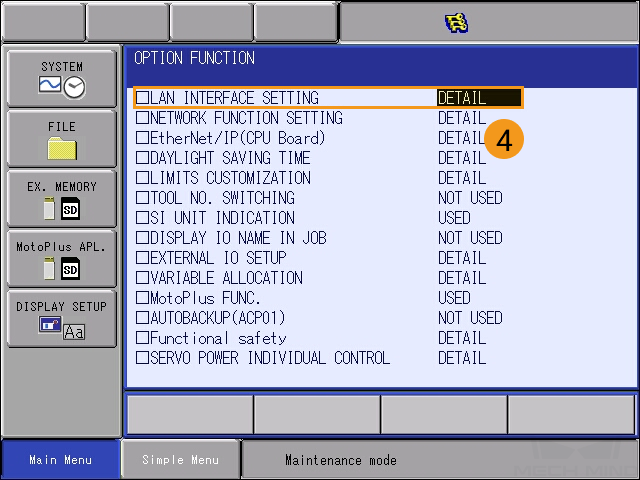
-
In the drop-down menu of IP ADDRESS SETTING (LAN2), select MANUAL SETTING, and set a proper IP ADDRESS and SUBNET MASK.
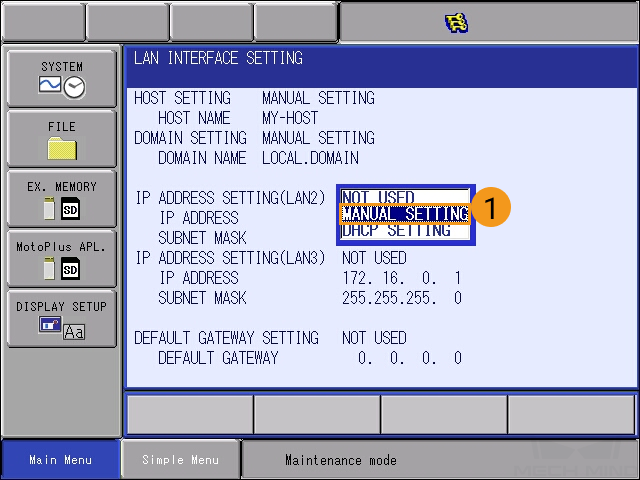
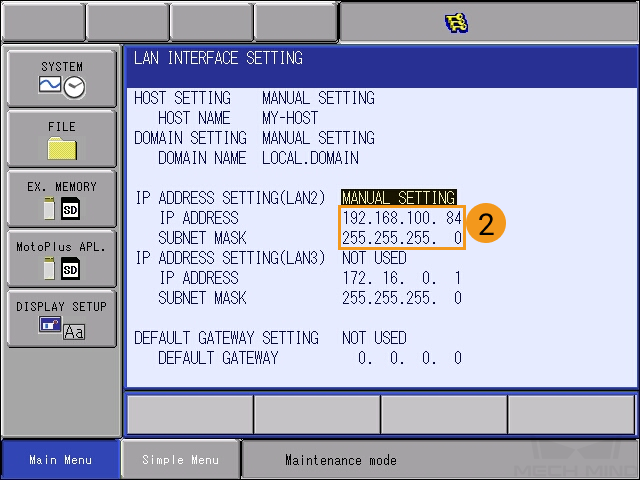
-
The IP address of LAN2 should belong to the same subnet as the IPC.
-
The subnet mask should be 255.255.255.0.
-
-
Press the
ENTERkey on the teach pendant, and then select YES in the pop-up message.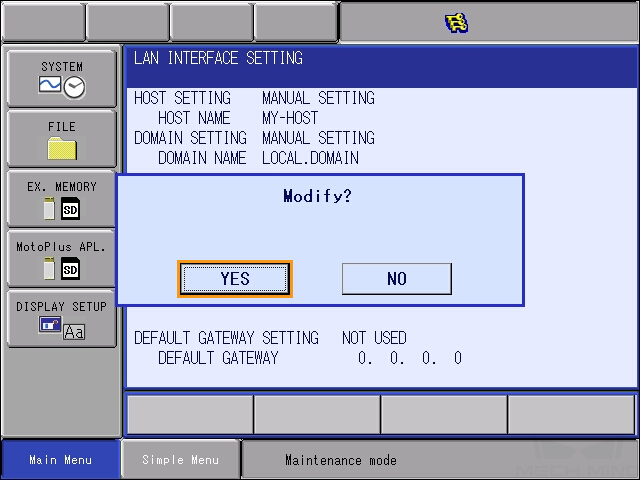
Load the Program Files to the Robot
Prepare the Files
-
Navigate to
Mech-Center/Robot_Server/Robot_FullControl/yaskawafrom the installation directory where Mech-Vision and Mech-Viz are installed. Copy the program file (yrc1000.out) and paste it to the root directory of your flash drive. -
Plug the USB flash drive with the program file into the USB port on the back of the teach pendant.
Copy the program file suitable for the used controller.
Load the Files
-
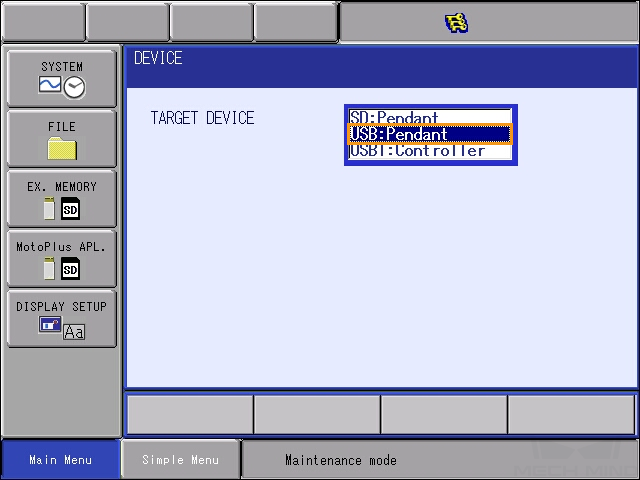
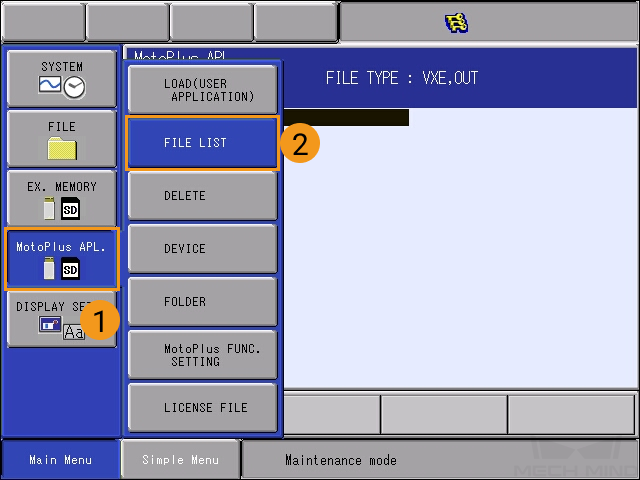
Under the Maintenance mode, select .
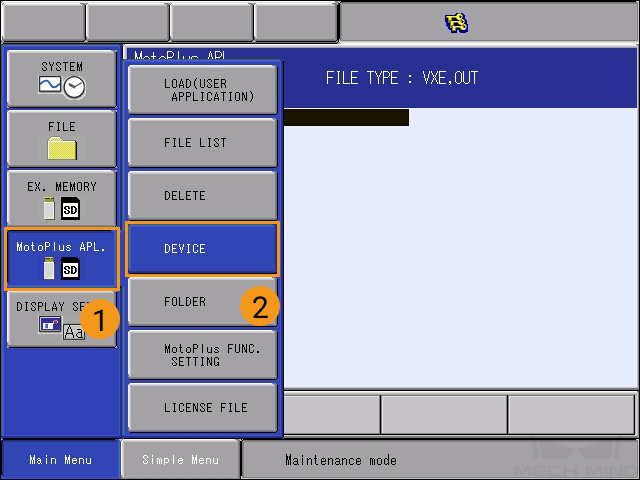
-
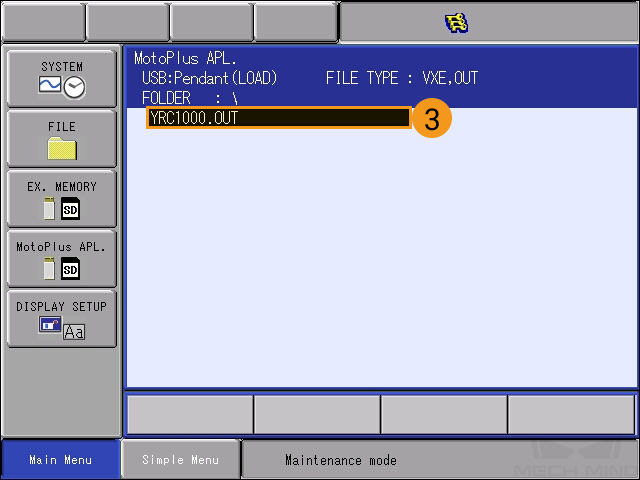
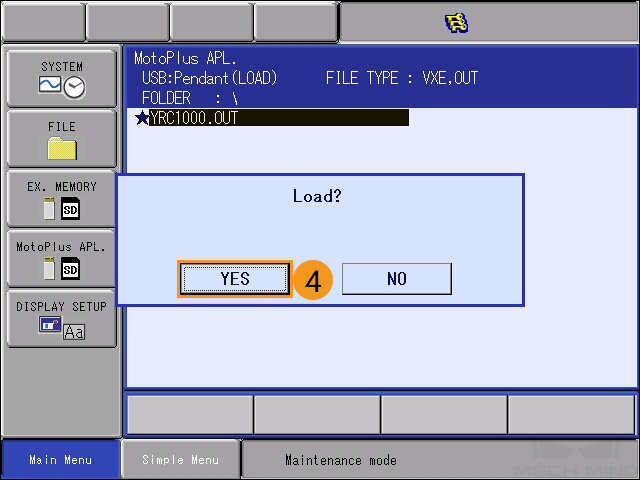
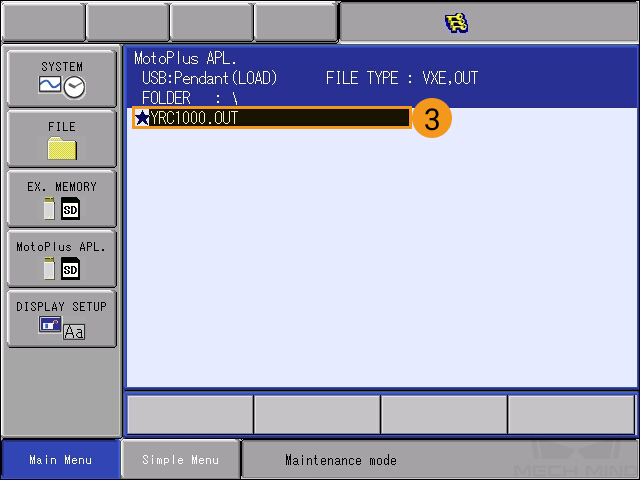
Select . Select the OUT file, press the
ENTERkey, and select YES in the pop-up window to start loading the program.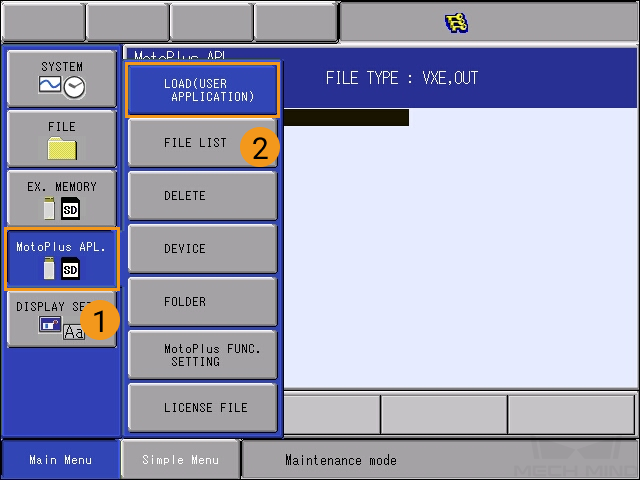
-
After the installation, select . You can see the installed file here.
-
Restart the controller (without pressing the MAIN MENU key) to enter the normal mode so that the YRC1000.out file can automatically run in the background. Turn the key to the far-left position, and Mech-Viz will be connected to the robot.

When started, the robot will run at the default speed (100%), a relatively high speed. To ensure safety, please modify the speed before triggering the Mech-Viz project.
-
Select .
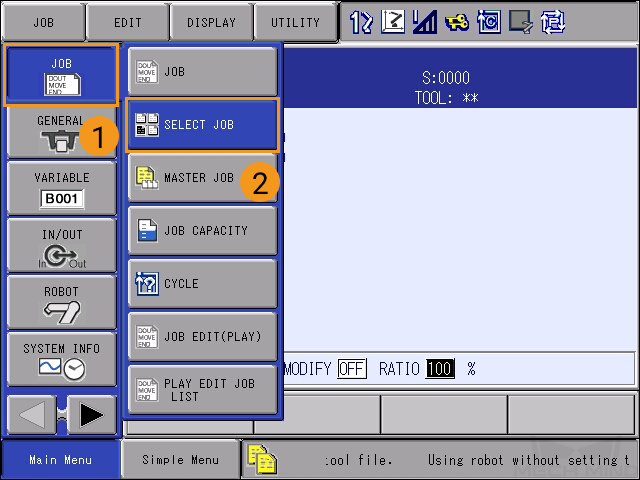
-
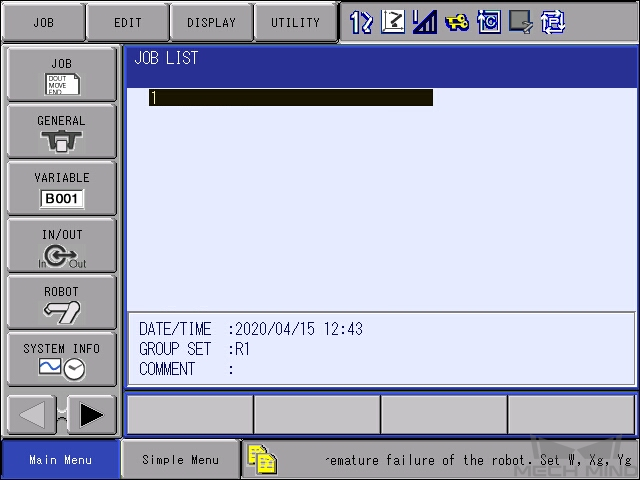
Select any blank job in the job list (or a job that contains the start point), and press the
SELECTbutton on the teach pendant. The following interface will appear.
-
Select , and then select the SPEED ADJUSTMENT bar.
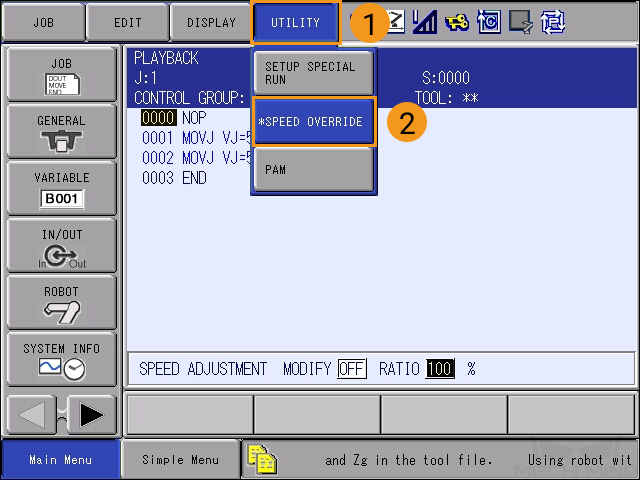

You cannot modify the parameters if the SPEED ADJUSTMENT bar is not selected. -
Press SPEED ADJUSTMENT and then OFF, press the
SELECT keyto switch MODIFY to ON.
You cannot adjust the speed if MODIFY is not switched to ON. -
Similarly, press the number after RATIO, and press the
SELECTkey to change the speed ratio. Press theEnterkey to save the change.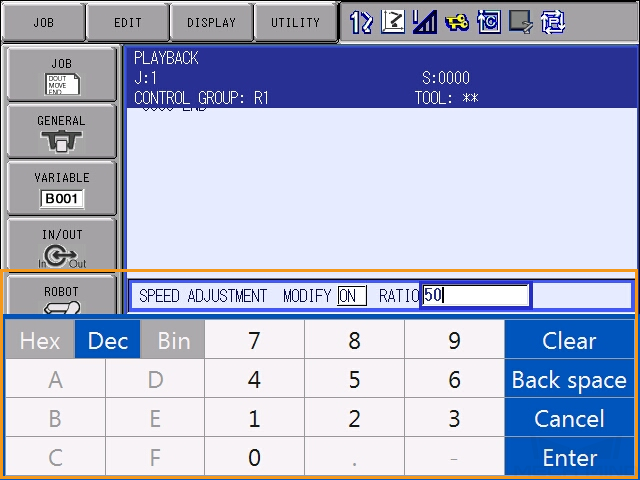
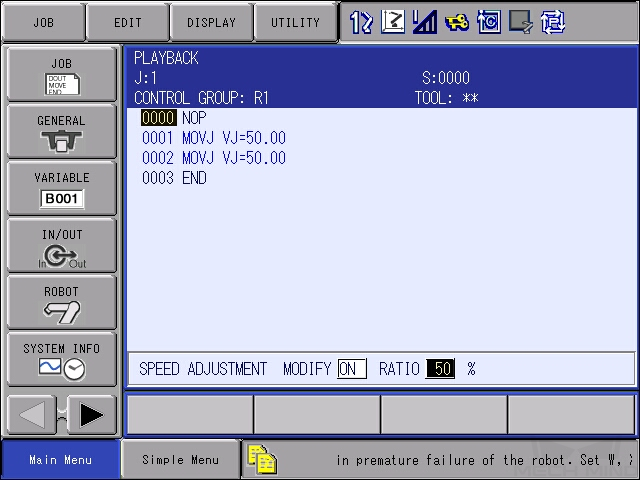
-
The interface after the speed is adjusted is as follows.
Test Master-Control Communication
Create a Mech-Viz Project
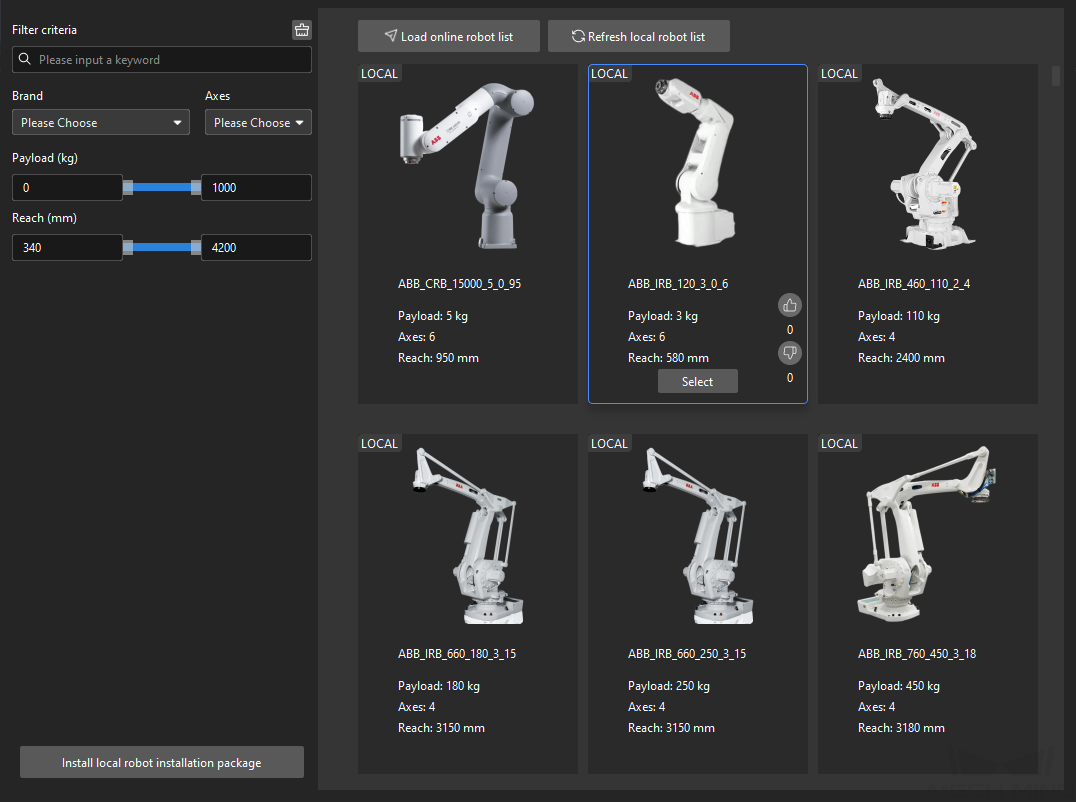
-
Open Mech-Viz, press Ctrl+N on the keyboard to create a new project. Select the robot model corresponding to your real robot brand and model on the interface as shown below.
-
Press Ctrl+S and create or select a folder to save the project.
-
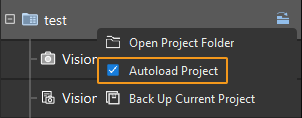
Right-click the project name in the left panel in Mech-Viz and select Autoload Project.
Connect to the Robot
-
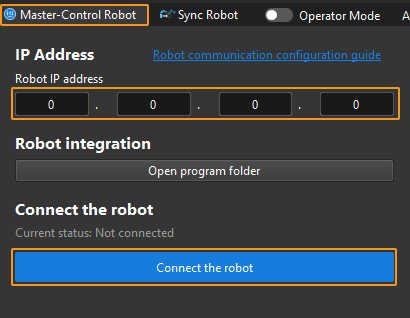
Click Master-Control Robot on the toolbar of Mech-Viz.
-
Input the IP address of the real robot in Robot IP address (the IP address in the picture is only an example). Click Connect the robot.
If Mech-Viz successfully connects the real robot, the current status will change to Connected. Meanwhile, the icon in the toolbar will turn from blue to green.
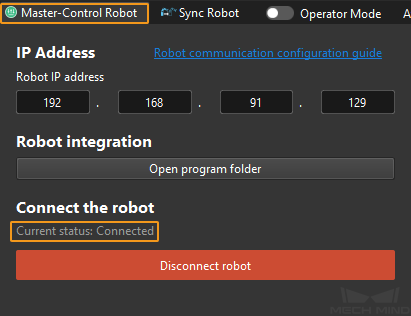
If the connection fails, please double-check the robot IP address.
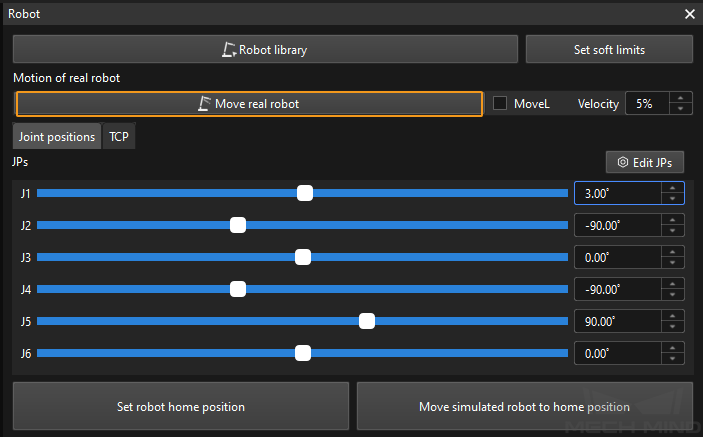
Move the Robot
-
In the toolbar of Mech-Viz, change the Vel. (velocity) and Acc. (acceleration) parameters to 5%.

-
Click Sync Robot in the toolbar, and you can synchronize the poses of the simulated robot in the 3D simulation space with the poses of the real robot. Then click Sync Robot again to unselect it.

-
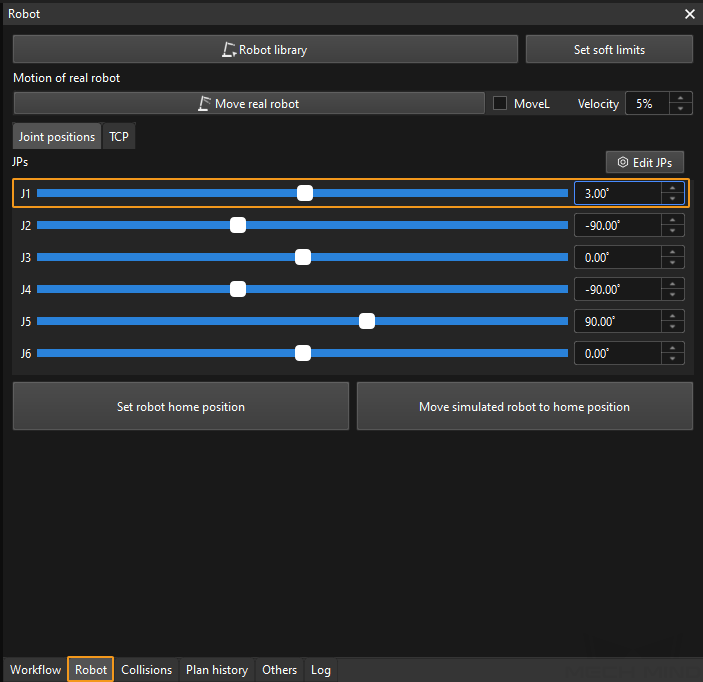
In the Robot tab, slightly adjust the value of J1, for example, from 0˚ to 3˚. This operation will move the simulated robot.
-
Click Move real robot and check if the real robot has moved. If the real robot has reached the joint positions set for the simulated robot, the master-control communication is working.
When moving the robot, please ensure the safety of personnel. In the case of an emergency, press the emergency stop button on the teach pendant!