Master-Control Program Description
Master-Control Program
The Master-Control program contains the following components. The SRC files are program files, the DAT files are data files, and XML files are communication configuration files.
| Program | Description |
|---|---|
mm_server.sub |
Background program for receiving Robserver data and sending robot pose, signal and status data |
mm_server.dat |
Data file for the background program |
motion_control.src |
Foreground program for controlling and moving the robot |
mainmodule.src |
Foreground main module of the master-control program |
mainmodule.dat |
Data file for the main module of the master-control program |
mm_status.xml |
Configuration file for communicating robot status |
mm_motion.xml |
Configuration file for communicating robot motion |
Signals
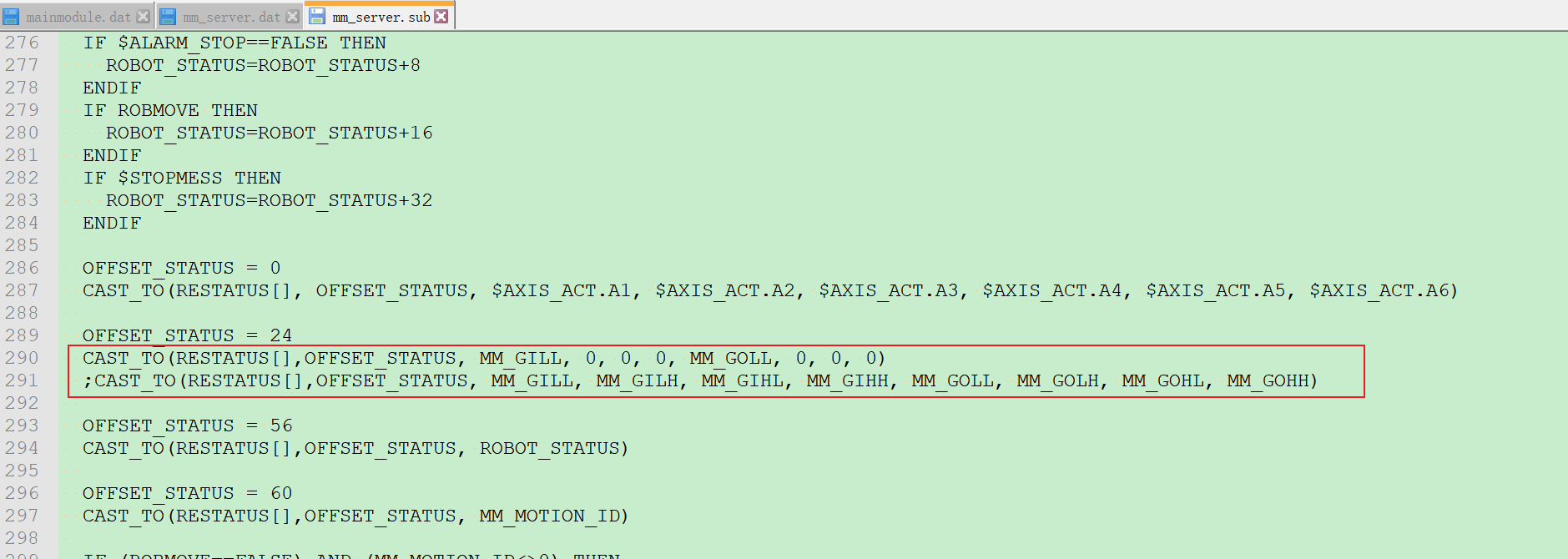
The program supports 16 DI and DO signals by default. User can extend to 64 DI and DO signals by editing the program file.
Method: Open the mm_server file, add a semicolon (comment symbol) at the start of Line 290 and remove the semicolon at the start of Line 291.
Signal table
| Internal flag | Description |
|---|---|
$FLAG[1] |
Flag indicating that mm_motion has successfully connected |
$FLAG[2] |
Flag indicating that mm_motion has received data |
$FLAG[5] |
Flag indicating that mm_status has successfully connected |
$FLAG[6] |
Flag indicating that mm_status has received data |
| IO occupied | Signal |
|---|---|
DI (16) |
$IN[1] - $IN[16] |
DO (16) |
$OUT[1] - $OUT[16] |
DI (64) |
$IN[1] - $IN[64] |
DO (64) |
$OUT[1] - $OUT[64] |