Mech-Eye SDK 2.4.0 Release Notes
This topic introduces the new features, improvements, and resolved issues of Mech-Eye SDK 2.4.0.
Mech-Eye Viewer
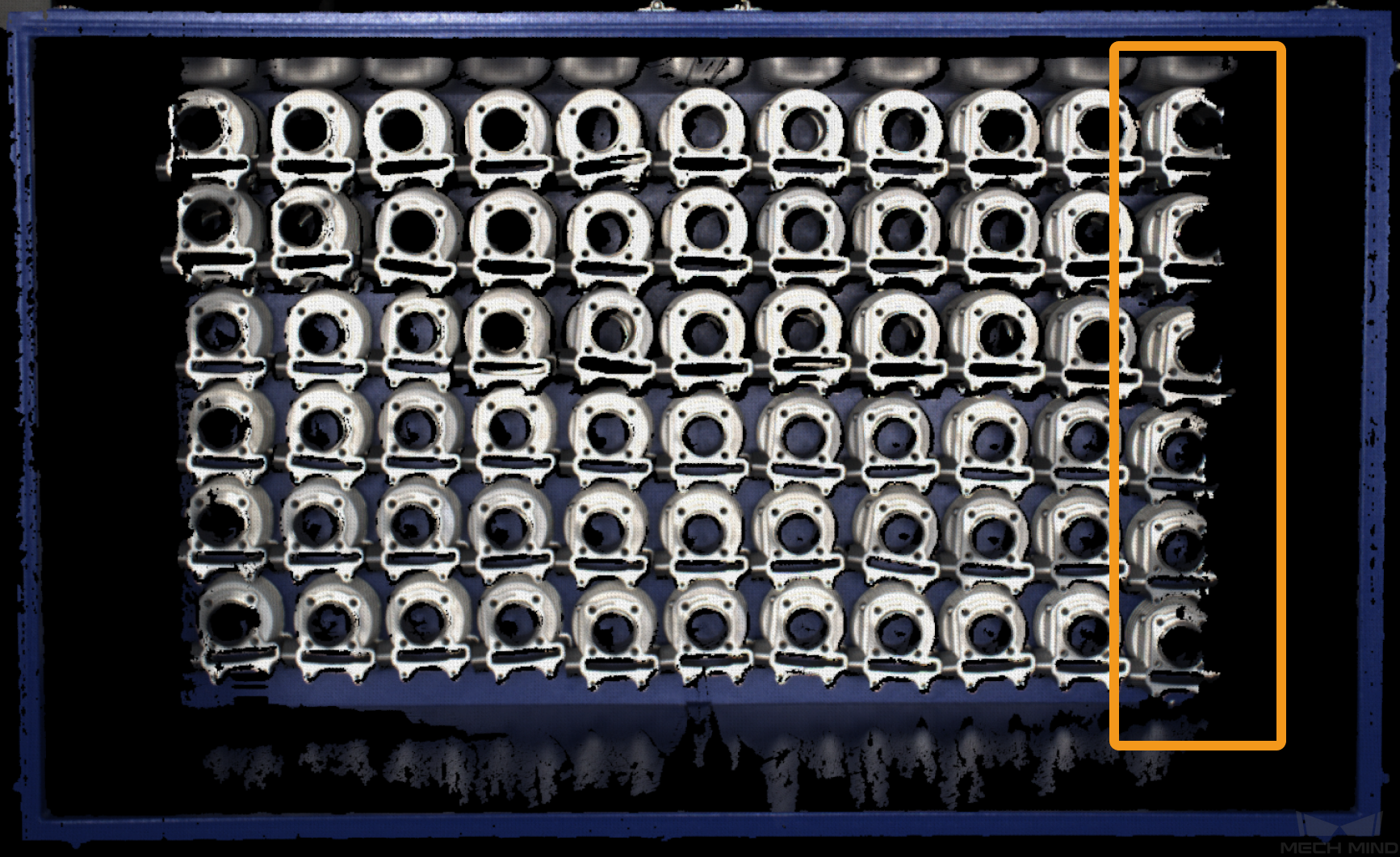
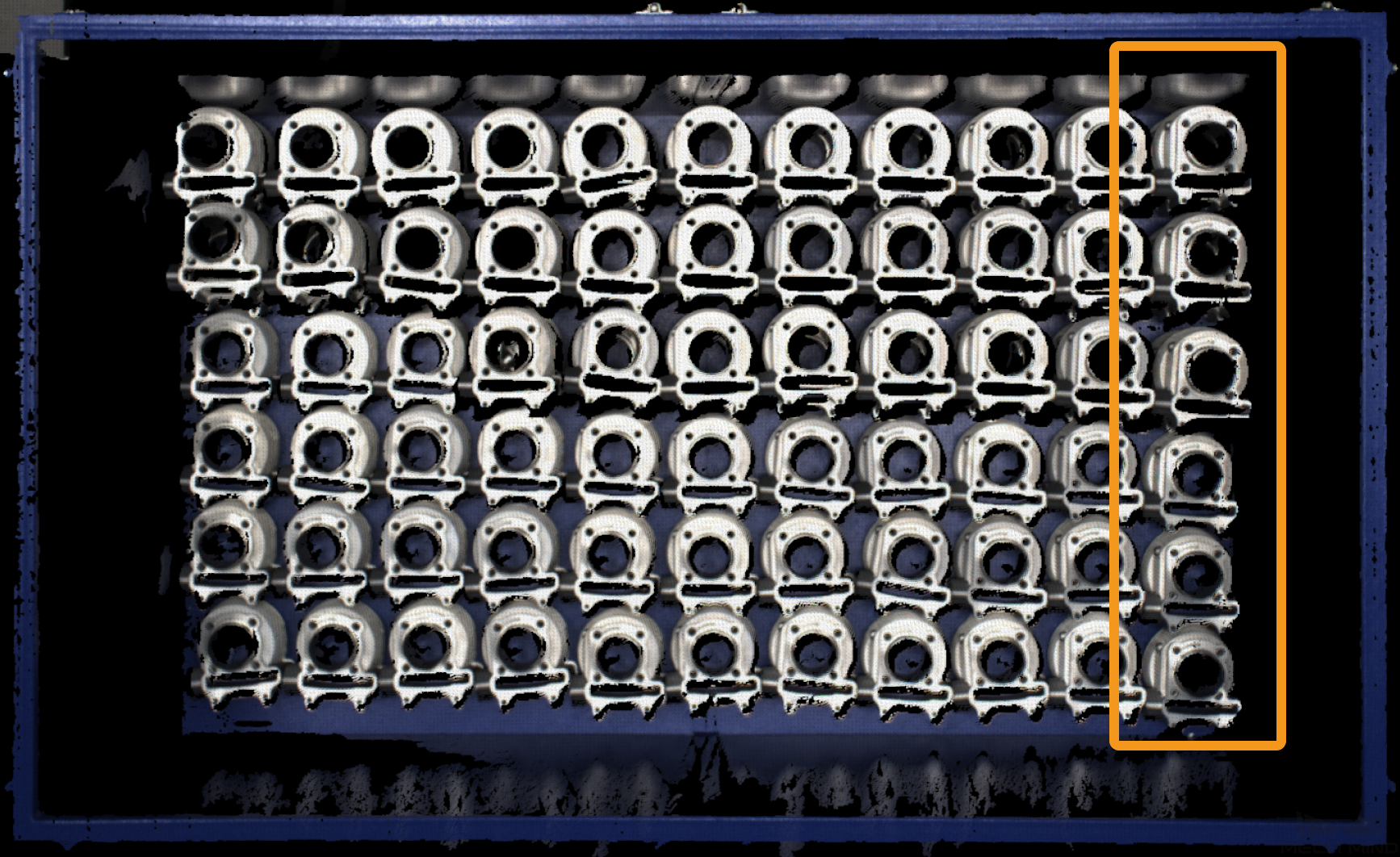
LSR L, LSR XL, LSR S, and DEEP: Improve the Performance of Reflective Fringe Coding Mode + More Complete Processing Mode
After the firmware of LSR L, LSR XL, LSR S, and DEEP is upgraded to 2.4.0, when acquiring data with the Reflective fringe coding mode + More complete processing mode, depth data loss due to the reflection of the bin side wall has been reduced:
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA: Improve Data Acquisition Speed
After the firmware of NANO ULTRA is upgraded to 2.4.0, the total acquisition time of the depth data will be shortened for all fringe coding modes:
-
Fast: shortened by about 100 ms.
-
Accurate: shortened by about 150 ms.
-
Reflective: shortened by about 500 ms.
NANO ULTRA, PRO S, and PRO M: Change Resolutions of 2D Image and Depth Map
After the firmware of NANO ULTRA, PRO S, and PRO M is upgraded to 2.4.0, the resolutions of the 2D image and depth map can be changed in Camera Controller. Using a lower resolution can speed up data acquisition effectively and thus better cope with applications with short cycle times. The size of the point cloud data can also be reduced.
| This function is available in the Administrator account. |
Better Log and Troubleshooting Guidance
Mech-Eye SDK 2.4.0 has improved the log interface and added the software log for Mech-Eye Viewer, preserving a more comprehensive operation record. Additionally, troubleshooting guidance is now available for errors, making it easier to identify causes and resolve issues.
Brand New Custom Reference Frame Tool
The brand new custom reference frame tool allows you to set a custom reference frame more flexibly, suitable for a variety of scenarios. You can also save the point cloud data in the custom reference frame, reducing the subsequent data processing workload.
Select Acquisition Mode for 2D Flash Exposure Mode
|
The following models provide this update: DEEP, LSR S, LSR L, NANO, NANO ULTRA, PRO XS, PRO S, and PRO M. |
After the firmware of the above models is upgraded to 2.4.0, when the Exposure Mode / 2D (Depth Source) Exposure Mode parameter in the 2D Parameters category is set to Flash, a new Flash Acquisition Mode parameter is now provided. This parameter allows you to select different acquisition modes suitable for different scenarios. The Fast mode enhances the acquisition speed and shortens the cycle time, while the Responsive mode allows you to adjust the Flash Exposure Time parameter and acquire 2D images with higher quality.
| For a detailed explanation of the 2D flash exposure mode, refer to 2D Flash Exposure Mode. |
Save Data Immediately Usable by Mech-Vision with One Click
The Save Data window now provides a Save data in the format immediately usable by Mech-Vision option. Data saved with this option selected can be immediately used by the Capture Images from Camera Step in Mech-Vision.
Check Data Transmission Time
After the camera is connected, you can check the transmission time of the 2D image and depth data in the Acquisition info tab on the right to assess the network conditions.
End of Support for Some Camera Models
Mech-Eye SDK 2.4.0 ends the support for some camera models no longer manufactured. The firmware of these models cannot be upgraded to version 2.4.0 or above, but you can still use the firmware and Mech-Eye SDK of version 2.3.4 and below.
The following models are no longer supported in Mech-Eye SDK 2.4.0:
| Model | Characteristic |
|---|---|
Deep (V1) |
The operating voltage is 12 V, and the Ethernet port is RJ45. |
Pro L (V1) |
|
Pro L Enhanced (V1) |
|
Pro Max (V1) |
Resolved Issues
The following issues have been resolved in Mech-Eye SDK 2.4.0:
-
Occasional: The acquisition time of the 2D image became significantly longer, exceeding the normal range.
-
Occasional: The camera disconnected on its own and reconnected during an extended period of continuous operation.
-
When the camera disconnected during data acquisition due to network issues, Mech-Eye Viewer froze and remained irresponsive after the pop-up window was closed.
-
When the IP address of the camera was modified to match that of the computer Ethernet port connected to it, Mech-Eye Viewer did not prompt for an IP address conflict and prevent the modification.
-
When a computer network interface card had multiple IP addresses in different subnets, the Computer IP Configuration section in the IP Configuration window in Mech-Eye Viewer displayed the first IP address of this network interface card, while the last IP address was used to connect to a camera.
-
In Intrinsic Parameter Tool, the title and content of the feature detection result during the intrinsic parameter check did not match.
-
When multiple virtual devices were loaded separately in multiple Mech-Eye Viewer windows on the same computer, if the parameters of one virtual device were adjusted, the other virtual devices would prompt for parameter setting synchronization.
-
In the Check and Configure 2D Cameras tool, Device Version might not be completely displayed if too long.
-
Occasional: The acquisition times recorded in the Acquisition info tab and the log were negative.
Mech-Eye API
LSR L, LSR XL, LSR S, and DEEP: Improve the Performance of Reflective Fringe Coding Mode + MoreComplete Processing Mode
After the firmware of LSR L, LSR XL, LSR S, and DEEP is upgraded to 2.4.0, when acquiring data with the LaserFringeCodingMode (Fringe Coding Mode) parameter set to Reflective and LaserProcessingMode (Processing Mode) parameter set to MoreComplete, depth data loss due to reflection of the bin side wall has been reduced:
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA: Improve Data Acquisition Speed
After the firmware of NANO ULTRA is upgraded to 2.4.0, the total acquisition time of the depth data will be shortened for all fringe coding modes:
-
Fast: shortened by about 100 ms.
-
Accurate: shortened by about 150 ms.
-
Reflective: shortened by about 500 ms.
Shorten Cycle Time Through Camera Event
By registering a callback function for the camera event, the client program can automatically detect whether the camera has finished projecting the structured light and acquiring the 3D data. After the projection and acquisition have finished, the robot can start moving, and the camera can finish the subsequent calculation and data transmission while the robot moves, thus shortening the cycle time.
For the methods of registering and deregistering the callback function for the camera event, refer to the relevant sample RegisterCameraEvent (C++ and C#) / register_camera_event (Python).
|
The relevant samples can be obtained from the installation path or GitHub. For the sample usage guide of different languages, please refer to Sample Usage Guide. |
Custom Reference Frame
After using the Custom Reference Frame tool in Mech-Eye Viewer to set a custom reference frame, you can call the new methods to obtain the transformation parameters of the custom reference frame from the camera reference frame and the point clouds in the custom reference frame.
For the specific methods, refer to the relevant sample TransformPointCloud (C++ and C#) / transform_point_cloud (Python).
|
The relevant samples can be obtained from the installation path or GitHub. For the sample usage guide of different languages, please refer to Sample Usage Guide. |
Select Acquisition Mode for 2D Flash Exposure Mode
|
The following models provide this update: DEEP, LSR S, LSR L, NANO, NANO ULTRA, PRO XS, PRO S, and PRO M. |
After the firmware of the above models is upgrade to 2.4.0, when the Scan2DExposureMode (Exposure Mode) / Scan2DPatternRoleExposureMode (2D (Depth Source) Exposure Mode) parameter is set to Flash, a new Scan2DFlashAcquisitionMode (Flash Acquisition Mode) parameter is now provided. This parameter allows you to select different acquisition modes suitable for different scenarios. The Fast mode enhances the acquisition speed and shortens the cycle time, while the Responsive mode allows you to adjust the Scan2DFlashExposureTime (Flash Exposure Time) parameter and acquire 2D images with higher quality.
| For a detailed explanation of the 2D flash exposure mode, refer to 2D Flash Exposure Mode. |
Use Jet Color Scheme to Render Depth Map
Mech-Eye API 2.4.0 provides a new sample RenderDepthMap (C++ and C#) / render_depth_map (Python) that shows how to render the depth map using the jet color scheme, making the depth values displayed in different colors of the jet color scheme.
|
The relevant samples can be obtained from the installation path or GitHub. For the sample usage guide of different languages, please refer to Sample Usage Guide. |
ROS Interfaces Provided
Mech-Eye SDK now provides the ROS interfaces again. You can realize the communication between the camera and the robot through ROS.
ROS interfaces can be obtained through GitHub:
|
End of Support for Some Camera Models
Mech-Eye SDK 2.4.0 ends the support for some camera models no longer manufactured. The firmware of these models cannot be upgraded to version 2.4.0 or above, but you can still use the firmware and Mech-Eye SDK of version 2.3.4 and below.
The following models are no longer supported in Mech-Eye SDK 2.4.0:
| Model | Characteristic |
|---|---|
Deep (V1) |
The operating voltage is 12 V, and the Ethernet port is RJ45. |
Pro L (V1) |
|
Pro L Enhanced (V1) |
|
Pro Max (V1) |
Resolved Issues
The following issues have been resolved in Mech-Eye SDK 2.4.0:
-
When the
discoverCameras()had been called but no connectable cameras were discovered, the program reported the Receive Data error continuously and would not terminate automatically. -
LabVIEW: The Fringe Coding Mode parameters in the samples did not provide the Translucent and Reflective options.
GenICam Interface
LSR L, LSR XL, LSR S, and DEEP: Improve the Performance of Reflective Fringe Coding Mode + MoreComplete Processing Mode
After the firmware of LSR L, LSR XL, LSR S, and DEEP is upgraded to 2.4.0, when acquiring data with the LaserFringeCodingMode (Fringe Coding Mode) parameter set to Reflective and LaserProcessingMode (Processing Mode) parameter set to MoreComplete, depth data loss due to reflection of the bin side wall has been reduced:
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA: Improve Data Acquisition Speed
After the firmware of NANO ULTRA is upgraded to 2.4.0, the total acquisition time of the depth data will be shortened for all fringe coding modes:
-
Fast: shortened by about 100 ms.
-
Accurate: shortened by about 150 ms.
-
Reflective: shortened by about 500 ms.
Select Acquisition Mode for 2D Flash Exposure Mode
|
The following models provide this update: DEEP, LSR S, LSR L, NANO, NANO ULTRA, PRO XS, PRO S, and PRO M. |
After the firmware of the above models is upgrade to 2.4.0, when the Scan2DExposureMode (Exposure Mode) / Scan2DPatternRoleExposureMode (2D (Depth Source) Exposure Mode) parameter is set to Flash, a new Scan2DFlashAcquisitionMode (Flash Acquisition Mode) parameter is now provided. This parameter allows you to select different acquisition modes suitable for different scenarios. The Fast mode enhances the acquisition speed and shortens the cycle time, while the Responsive mode allows you to adjust the Scan2DFlashExposureTime (Flash Exposure Time) parameter and acquire 2D images with higher quality.
| For a detailed explanation of the 2D flash exposure mode, refer to 2D Flash Exposure Mode. |
End of Support for Some Camera Models
Mech-Eye SDK 2.4.0 ends the support for some camera models no longer manufactured. The firmware of these models cannot be upgraded to version 2.4.0 or above, but you can still use the firmware and Mech-Eye SDK of version 2.3.4 and below.
The following models are no longer supported in Mech-Eye SDK 2.4.0:
| Model | Characteristic |
|---|---|
Deep (V1) |
The operating voltage is 12 V, and the Ethernet port is RJ45. |
Pro L (V1) |
|
Pro L Enhanced (V1) |
|
Pro Max (V1) |
Resolved Issues
The following issues have been resolved in Mech-Eye SDK 2.4.0:
-
Occasional: The acquisition time of the 2D image became significantly longer, exceeding the normal range.
-
Occasional: The camera disconnected on its own and reconnected during an extended period of continuous operation.
-
When continuous data acquisition was performed without wait time between acquisitions, timeout errors frequently occurred.
-
During data acquisition, if the IP address of another camera in the same local network was modified by another GenICam client, the data acquisition of the currently connected camera would be terminated by an error.