UHP-140
Physical Specifications
Model |
UHP-140 |
|---|---|
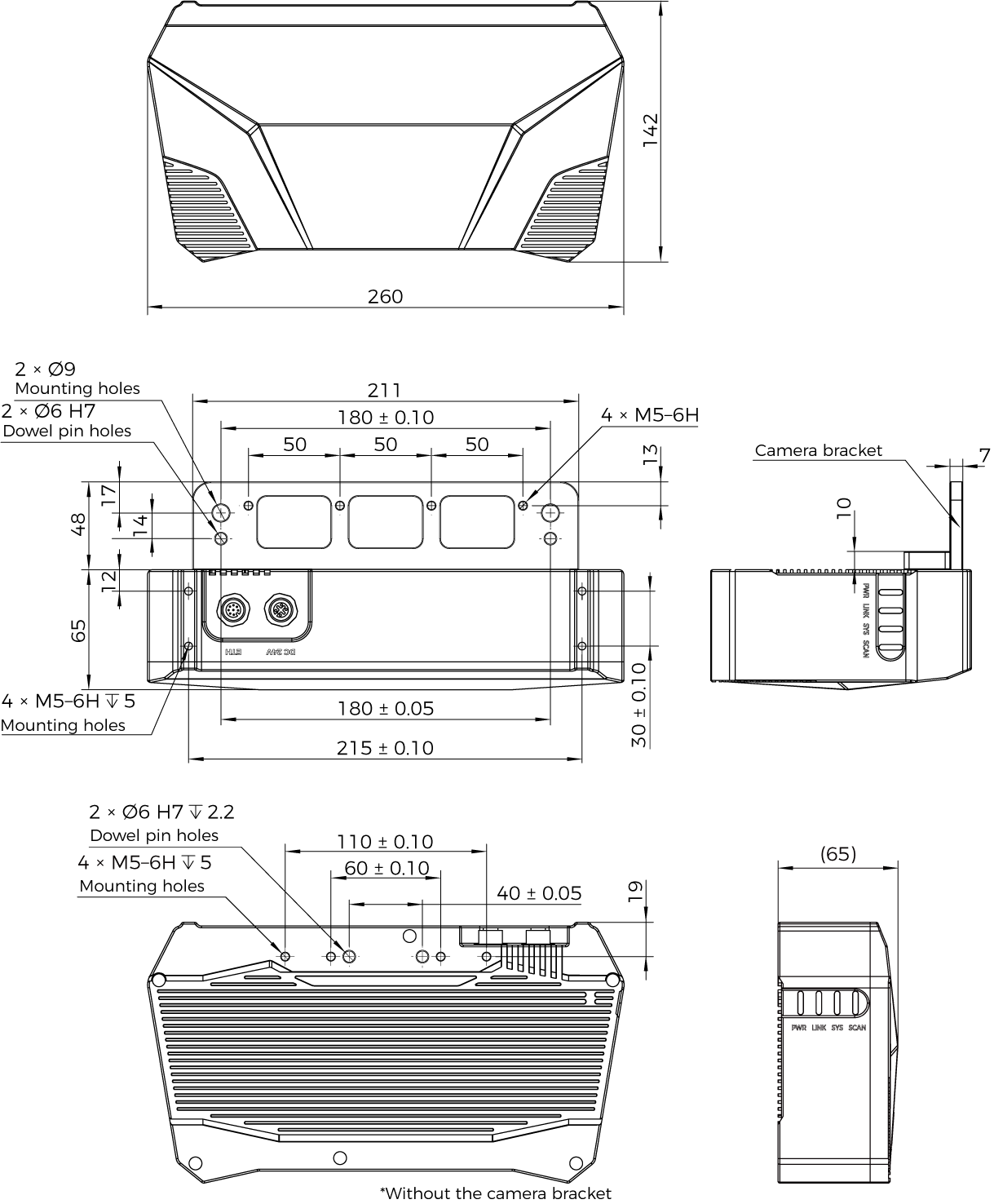
Dimensions |
260 × 65 × 142 mm |
Weight |
1.9 kg |
Baseline |
80 mm |
Light source |
Blue LED (459 nm, RG2) |
2D image color |
Monochrome |
Operating temperature |
0–45°C |
Operating humidity |
0–85%RH, non-condensing |
Storage temperature |
-20–60°C |
Communication interface |
Gigabit Ethernet |
Input |
24 VDC, 3.75 A |
Power |
Idle: 16 W Average: 24 W Peak: 40 W |
IP rating(1) |
IP65 |
Cooling |
Passive |
Flatness tolerance for mounting surface(2) |
± 0.05 mm |
Vibration tolerance(3) |
Sinusoidal vibration along the X-, Y-, and Z-axes, 10–57 Hz, 1.5 mm peak-to-peak value, 3 hours per axis |
Shock tolerance(4) |
Half sine shock pulses along the positive and negative directions of the X-, Y-, and Z-axes, 147 m/s2 (15 g), 11 ms, 3 shocks per direction, 18 shocks in total |
(1) Test implemented based on IEC 60529. 6: dust-tight; 5: protected against water jets.
(2) The flatness of the surface used to mount the camera should satisfy this requirement.
(3) Test implemented based on IEC 60068-2-6.
(4) Test implemented based on IEC 60068-2-27.
Performance Specifications
Working distance |
280–320 mm |
|---|---|
Recommended working distance |
280–320 mm |
Object focal distance(1) |
300 mm |
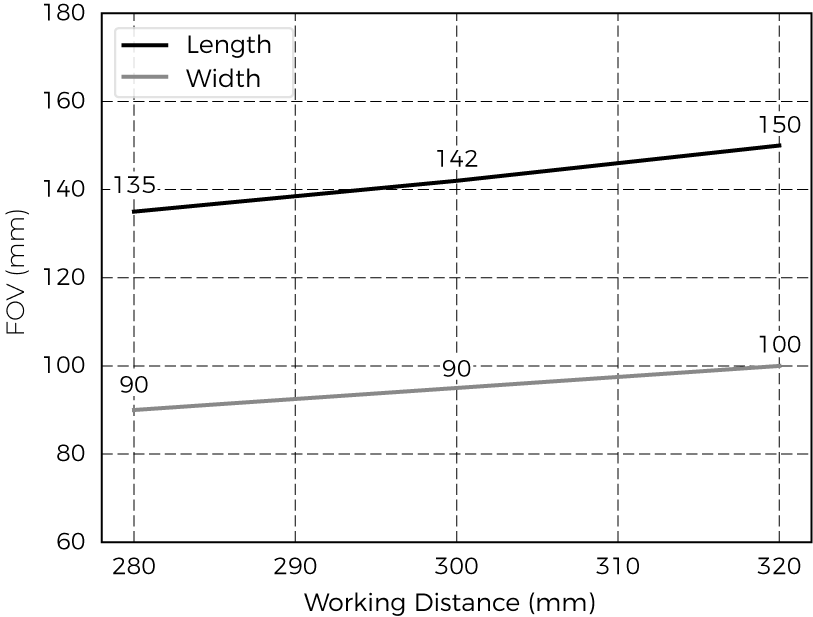
FOV (near) |
135 × 90 mm @ 0.28 m |
FOV (far) |
150 × 100 mm @ 0.32 m |
Resolutions |
2048 × 1536 |
Typical capture time(2),(3) |
0.6–0.9 s |
Recommended warm-up time(2),(4) |
60 min |
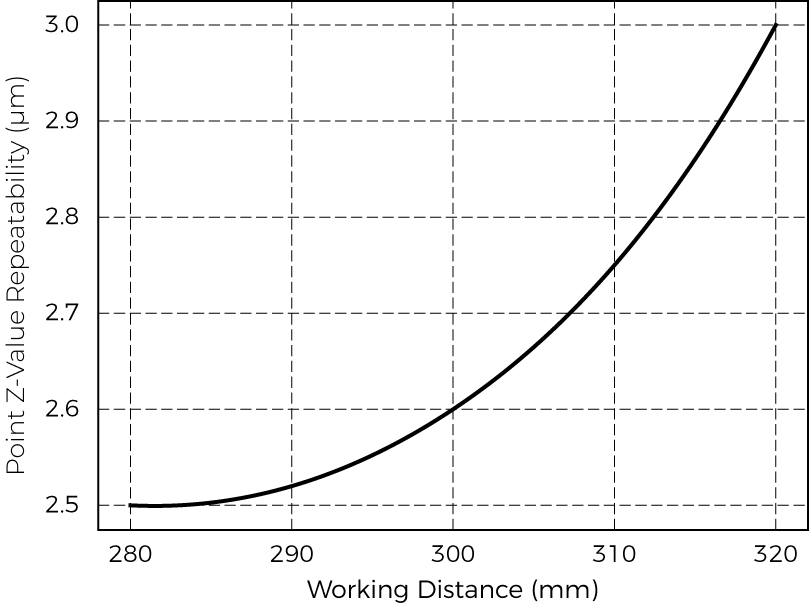
Point Z-value repeatability (1σ)(2),(5) |
2.6 μm @ 0.3 m |
Measurement accuracy (VDI/VDE)(2),(6) |
0.03 mm @ 0.3 m |
(1) The object focal distance of the 2D camera inside the product.
(2) Unless otherwise specified, this test was conducted under the standard test conditions.
(3) The range of time taken to acquire data using Mech-Eye Viewer in the Fast and Accurate fringe coding mode.
(4) The recommended warm-up time required to guarantee data accuracy to the listed values. For the warm-up method, refer to the user manual (The data acquisition interval is 3 s). Please adjust the warm-up time based on the actual data acquisition interval, ambient temperature, and heat-dissipation conditions.
(5) The standard deviation of the 100 measured depth values of each point on the target object was calculated, and then the median of all the standard deviations was taken. The target object was a white ceramic plate with a rough surface. The Point Cloud Processing parameters were set to Off.
(6) Test implemented with reference to VDI/VDE 2634 Part 2.
Certifications
CE
Hereby [Mech-Mind Robotics Technologies Co., Ltd.] declares that [UHP-140] is in compliance with the Electromagnetic Compatibility Directive 2014/30/EU.
The full text of the EU Declaration of Conformity is available at https://downloads.mech-mind.com/?tab=tab-eu-dec
Standard Test Conditions
Working distance |
280–320 mm |
||
|---|---|---|---|
Ambient temperature |
15–30°C |
||
Ambient humidity |
0–85%RH, non-condensing |
||
Ambient light intensity |
200–1000 lx |
||
Camera parameters(1) |
5 ms |
||
Flash |
|||
0 dB |
|||
High |
|||
Accurate |
|||
Normal |
|||
Normal |
|||
Normal |
|||
Tested region(2) |
Length: 90% of FOV length Width: 90% of FOV width Position: center of FOV |
||
(1) Parameters not listed are set to their default values.
(2) Test data was obtained from this region.