方案常见问题
问题一:纸箱漏识别,导致Mech-Vision工程无输出
可能原因
-
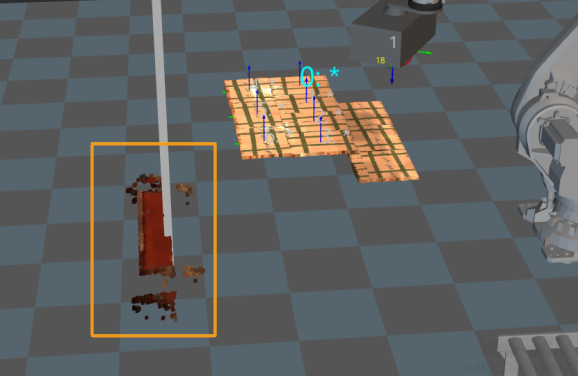
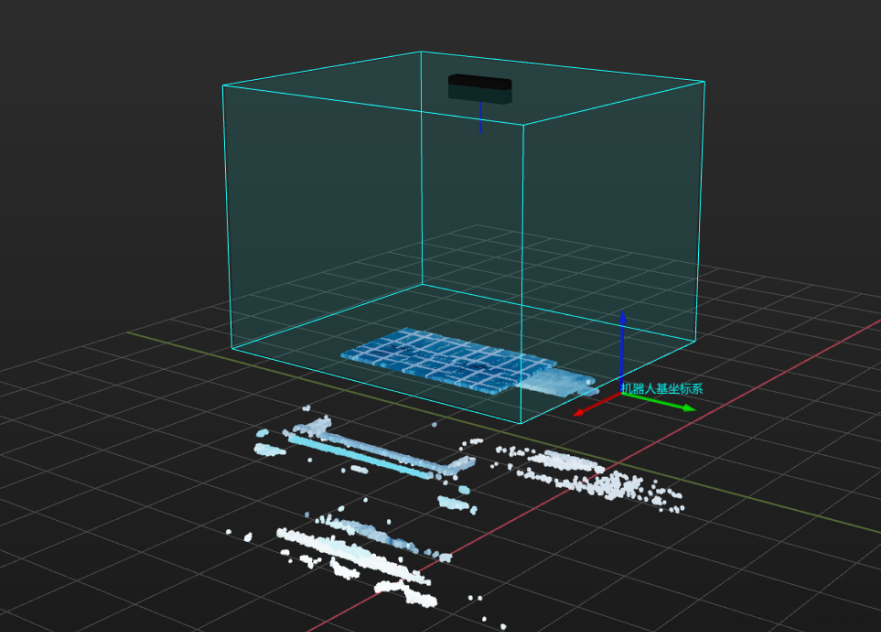
3D ROI 设置错误,纸箱不在 3D ROI 内,导致Mech-Vision工程无输出或漏识别。
-
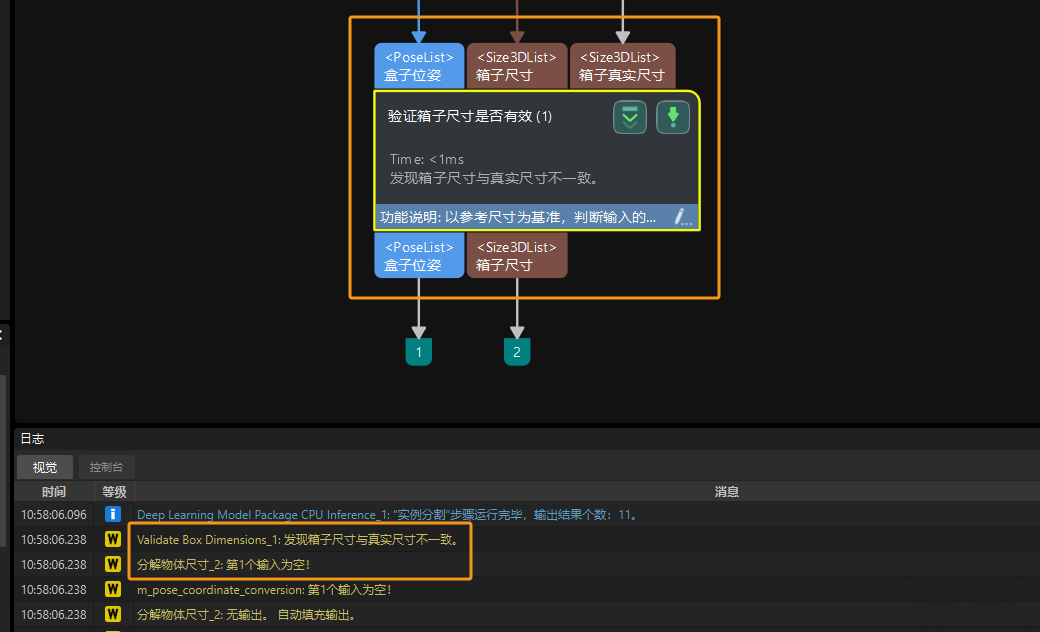
点云预处理并获取最高层掩膜步骤组合参数处输入的纸箱尺寸与识别到的纸箱尺寸差异大,无法进行尺寸校验,导致漏识别。

-
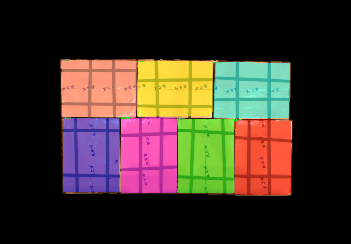
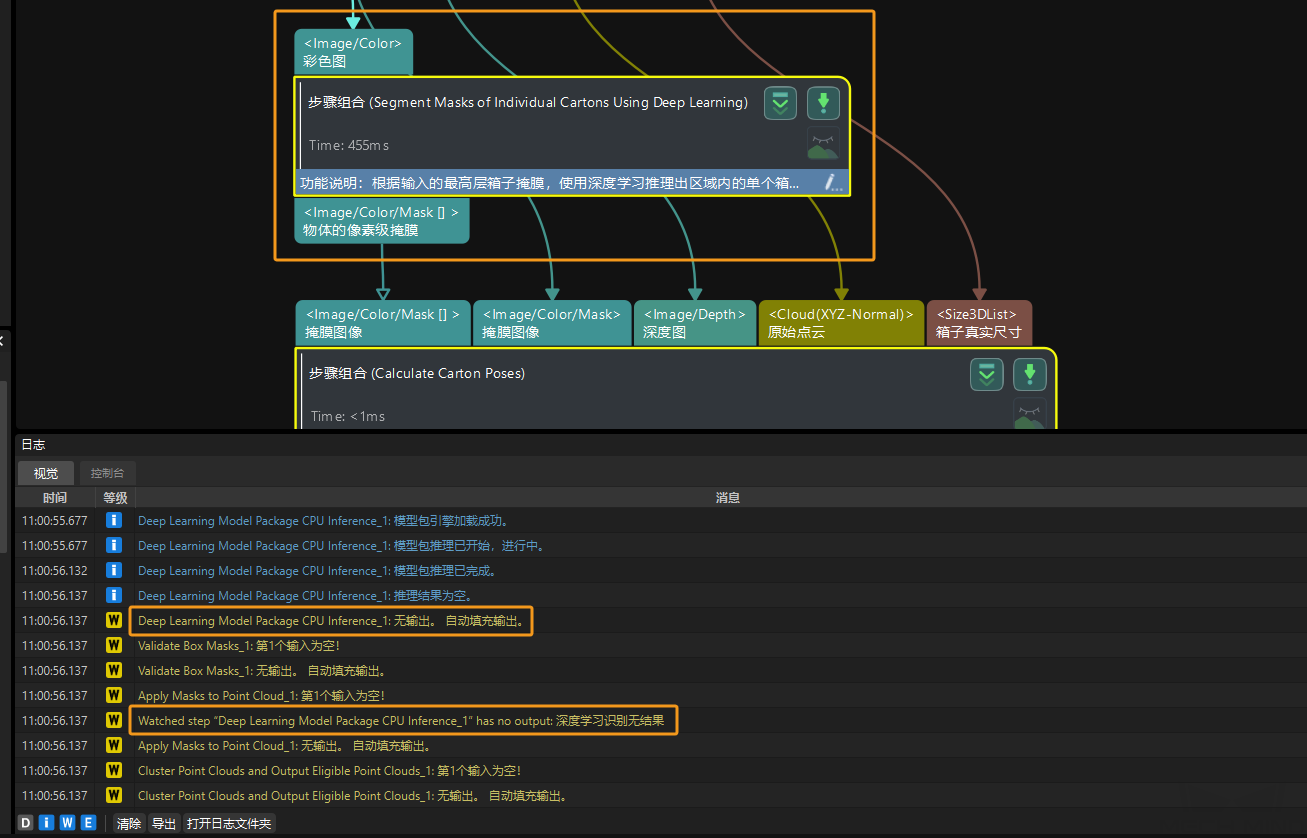
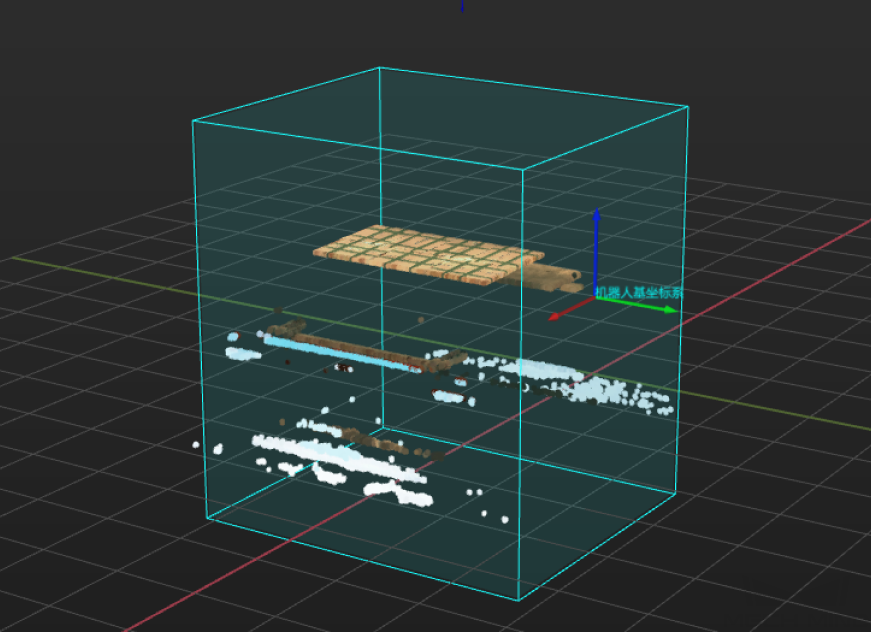
深度学习未正确分割单个纸箱掩膜,在后续处理过程中无法进行尺寸校验,导致漏识别。

解决方法
-
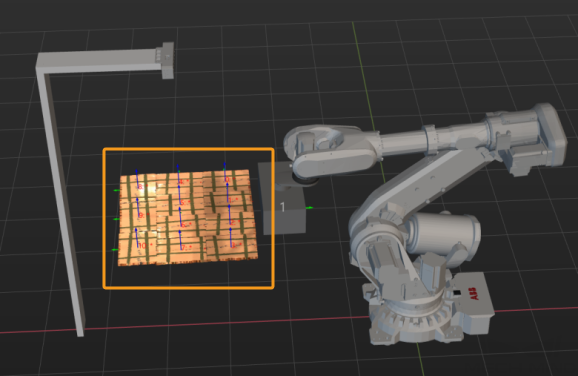
根据工作站布局和垛型尺寸重新设置 3D ROI,使纸箱不超出 ROI。
-
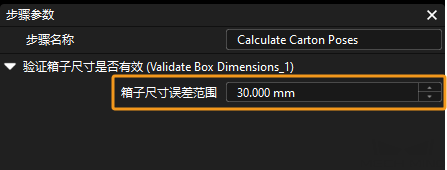
测量纸箱尺寸,并与输入的尺寸进行对比。若尺寸差异过大,可在点云预处理并获取最高层掩膜步骤组合的读取物体尺寸参数处重新设置纸箱尺寸。若尺寸差异较小,可适当调大计算纸箱位姿步骤组合的箱子尺寸误差范围参数。
-
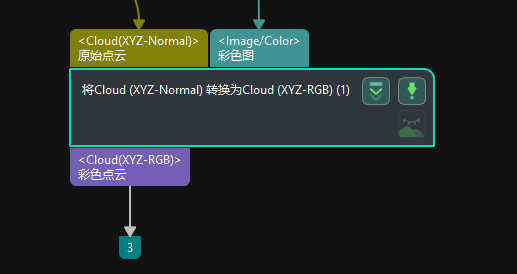
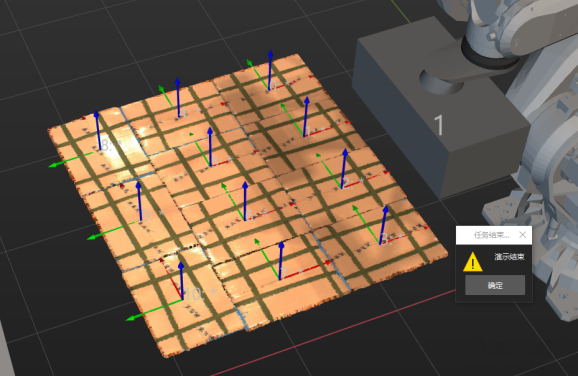
双击进入使用深度学习分割单个纸箱掩膜步骤组合,查看深度学习模型包推理步骤的可视化输出结果,确保可视化输出结果正常(如下图所示)。若可视化输出结果异常,可参考 问题三 。