夹具设计
本节将介绍单品类纸箱拆垛案例中夹具的设计,包括夹具选型、夹具相关元器件选型等。
夹具选型


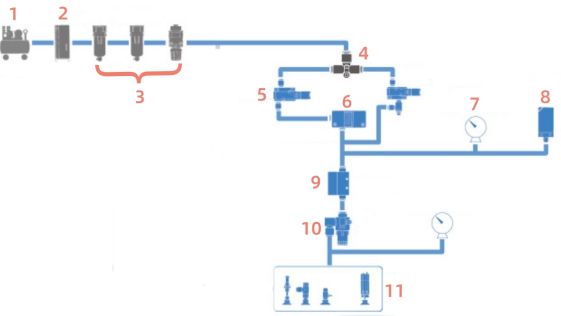
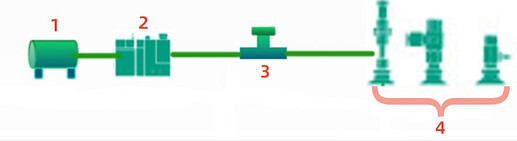
真空系统设计


夹具相关元器件选型
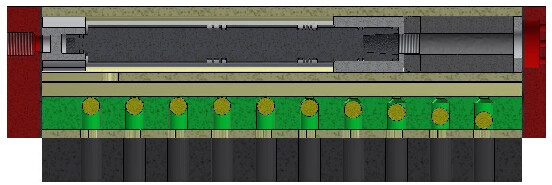
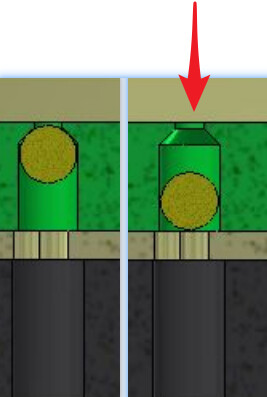
自闭阀
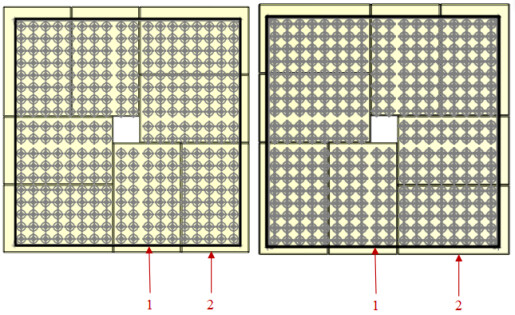
自闭阀是一种常见的装置,常用于海绵吸盘上,用于控制吸嘴的开关状态。当吸嘴没有与待抓物体贴合时,自闭阀可以关闭该吸嘴,防止真空泄漏,以确保其他吸嘴仍然能够正常工作,从而产生充足的真空以保持抓取稳定性。
因此,在使用偏置抓取功能时,确保关闭部分外露吸嘴以及合理设置自闭阀是非常重要的。这样可以确保在抓取较小的纸箱时,海绵吸盘仍能够保持足够的负压,实现稳定和有效的抓取。
破真空阀
为了加快视觉节拍并提高生产效率,通常在实际项目中会为吸盘增加真空破坏器。这种功能通过引入压缩空气来破坏吸盘与纸箱之间的真空状态,从而快速释放纸箱。
在使用没有真空破坏器的吸盘时,纸箱只能依靠自身重量来脱离吸盘,当纸箱重量较轻时,脱离速度相对较慢,会影响整个抓取的时间。真空破坏器能够加速纸箱与吸盘的分离过程,使得抓取和放置更加高效,减少耗时。

夹具保护装置设计
吸盘吸取纸箱后,会受机器人加速、减速或急停的影响,存在纸箱掉落的风险。对于要求较高的场景,如纸箱内装有白酒、玻璃瓶装药品、香烟等,通常需利用机械结构提高对纸箱抓取的可靠性,常见机械结构如下。
| 类型 | 图示 | 结构说明 |
|---|---|---|
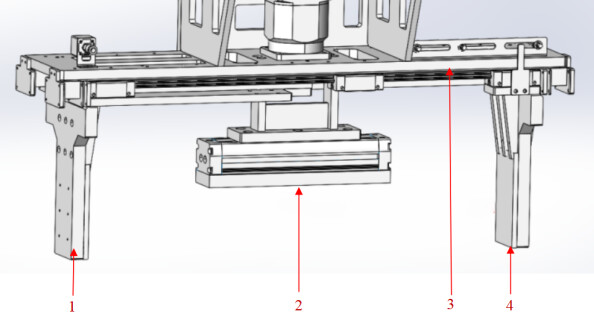
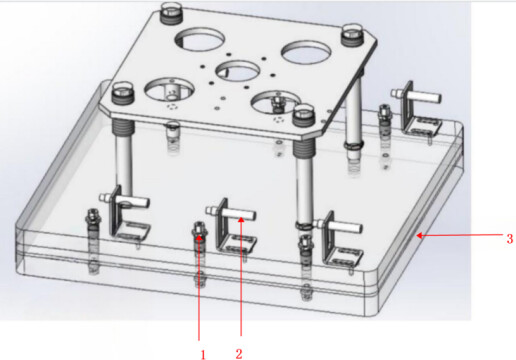
抱夹式保护装置 |
|
1-左侧滑动夹指 2-海绵吸盘 3-夹指滑动平台 4-右侧滑动夹指 |
|
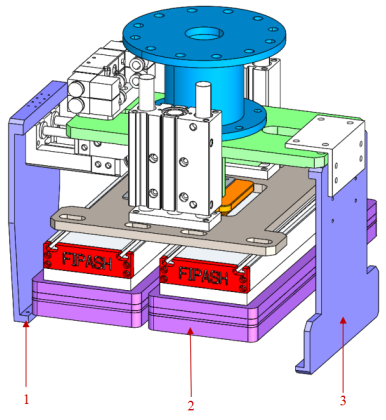
1-左夹板 2-海绵吸盘 3-右夹板 |
|
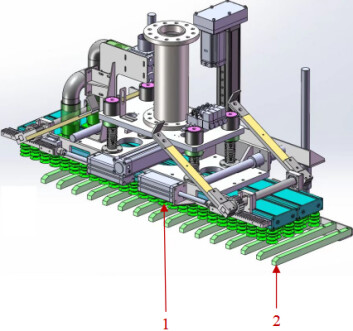
托底式保护装置 |
|
1-吸盘 2-托底装置 |
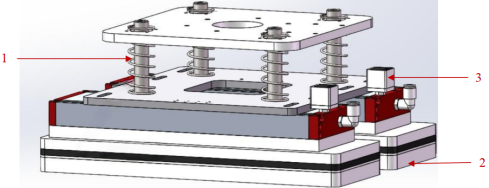
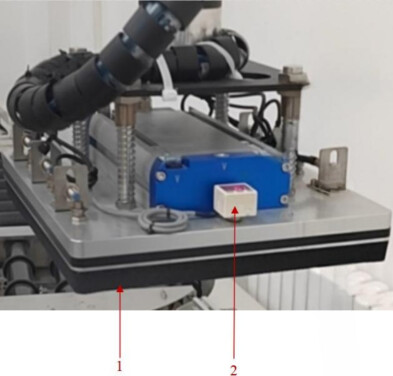
夹具缓冲装置 |
|
1-弹簧缓冲装置 2-负压传感器 3-海绵吸盘 |