相机选型及安装
本节将介绍工位硬件安装过程中的相机选型与安装方式。
相机选型
在单品类麻袋拆垛的实际项目中,通常选用Mech-Eye DEEP 相机。
Mech-Eye DEEP 相机具有大视野、大景深和抗环境光性能优异的特点,详细技术参数可参考DEEP 技术参数。
相机安装方式
常见的相机安装方式分为两种,Eye in Hand(EIH) 安装方式和 Eye to Hand(ETH) 安装方式,分别如下图中左图、右图所示。
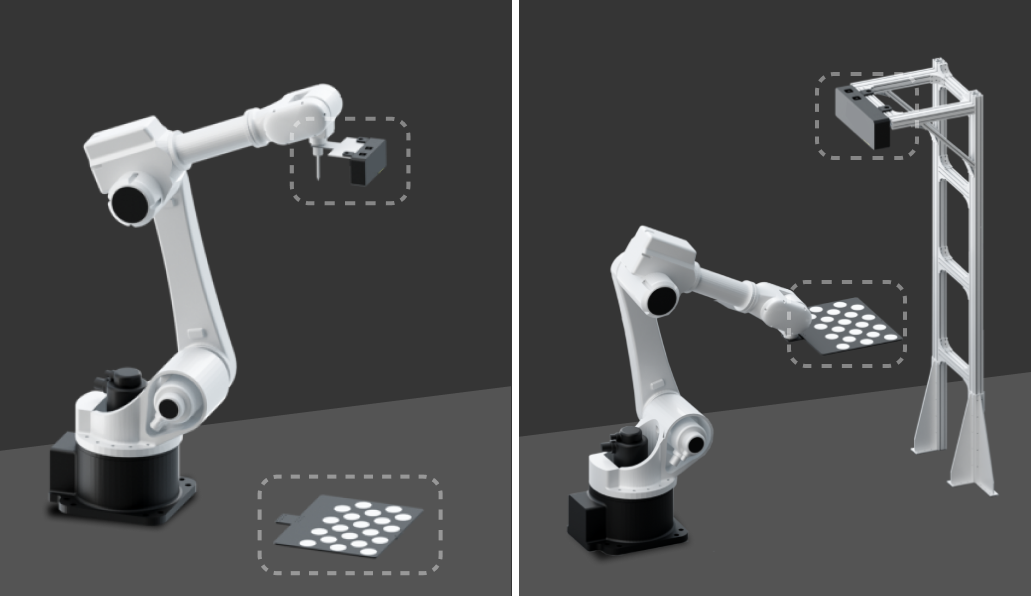
两种相机安装方式的特点和优势如下表所示。
| 安装方式 | 特点 | 优势 |
|---|---|---|
Eye in Hand |
相机安装在夹具上。 |
|
Eye to Hand |
相机固定安装在相机支架上。 |
|
相机安装高度
确定相机安装高度时,需使用“Mech-Eye 工业级 3D 相机视野计算器”,并提前获取麻袋满垛时的高度、工位顶层尺寸信息。具体流程如下。
-
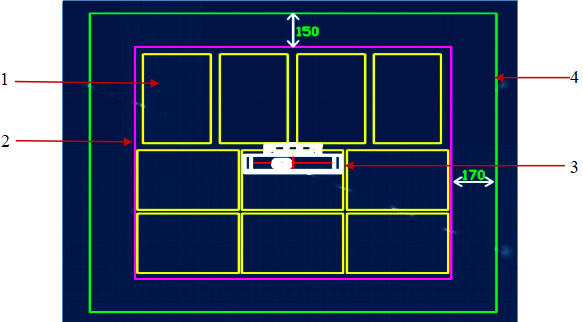
计算相机在垛型顶部的视野。
相机的视野应完全覆盖最上层麻袋上表面,且在料筐顶部视野四周的每个边都应预留出 150~200 mm 的余量,用于兼容来料位置偏移。如下图所示,1 为麻袋,2 为托盘,3 为相机,4 为相机视野。
-
使用“Mech-Eye 工业级 3D 相机视野计算器”计算工作距离。
在“Mech-Eye 工业级 3D 相机视野计算器”中选择相机型号,然后不断调整“输入工作距离”参数值,直到计算出的视野宽度和高度大于上一步计算出的“相机在垛型顶部的视野”。视野计算器的具体使用方法可参考视野计算器。
-
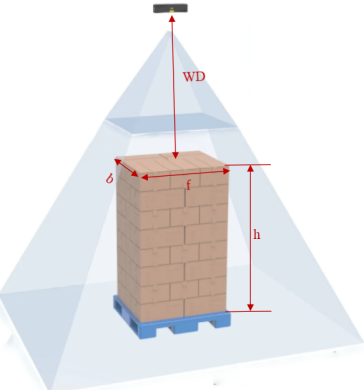
计算相机的安装高度。
如下图所示,相机安装高度 = 工作距离(WD)+ 物料高度(H)。